嵌入式Linux驱动程序开发
嵌入式Linux驱动程序开发
系统调用是操作系统内核和应用程序之间的接口,设备驱动程序是操作系统内核和机器硬件之间的接口。设备驱动程序为应用程序屏蔽了硬件的细节,这样在应用程序看来,硬件设备只是一个设备文件,应用程序可以象操作普通文件一样对硬件设备进行操作。设备驱动程序是内核的一部分。
Linux将设备主要分成两大类:一类是块设备,类似磁盘以记录块或扇区为单位,成块进行输入/输出的设备;另一类是字符设备,类似键盘以字符为单位,逐个进行输入/输出的设备。网路设备是介于块设备和字符设备之间的一种特殊设备。
块设备接口仅支持面向块的I/O操作,所有I/O操作都通过在内核地址空间中的I/O缓冲区进行,它可以支持随机存取的功能。文件系统通常都建立在块设备上。
字符设备接口支持面向字符的I/O操作,由于它们不经过系统的快速缓存,所以它们负责管理自己的缓冲区结构。字符设备接口只支持顺序存取的功能,一般不能进行任意长度的I/O请求,而是限制I/O请求的长度必须是设备要求的基本块长的倍数。
1.设备驱动程序的概念
设备驱动程序实际是处理和操作硬件控制器的软件,从本质上讲,是内核中具有最高特权级的、驻留内存的、可共享的底层硬件处理例程。驱动程序是内核的一部分,是操作系统内核与硬件设备的直接接口,驱动程序屏蔽了硬件的细节,完成以下功能:
— 对设备初始化和释放;
— 对设备进行管理,包括实时参数设置,以及提供对设备的操作接口;
— 读取应用程序传送给设备文件的数据或者回送应用程序请求的数据;
— 检测和处理设备出现的错误。
Linux操作系统将所有的设备全部看成文件,并通过文件的操作界面进行操作。对用户程序而言,设备驱动程序隐藏了设备的具体细节,对各种不同设备提供了一致的接口,一般来说,是把设备映射为一个特殊的设备文件,用户程序可以像对其他文件一样对此设备文件进行操作。这意味着:
— 由于每一个设备至少由文件系统的一个文件代表,因而都有一个“文件名”。
— 应用程序通常可以通过系统调用open()打开设备文件,建立起与目标设备的连接。
— 打开了代表着目标设备的文件,即建立起与设备的连接后,可以通过read()、write()、ioctl()等常规的文件操作对目标设备进行操作。
设备文件的属性由三部分信息组成:第一部分是文件的类型,第二部分是一个主设备号,第三部分是一个次设备号。其中类型和主设备号结合在一起惟一地确定了设备文件驱动程序及其界面,而次设备号则说明目标设备是同类设备中的第几个。
由于Linux 中将设备当做文件处理,所以对设备进行操作的调用格式与对文件的操作类似,主要包括open()、read()、write()、ioctl()、close()等。应用程序发出系统调用命令后,会从用户态转到核心态,通过内核将open()这样的系统调用转换成对物理设备的操作。
2.处理器与设备间数据交换方式
处理器与外设之间传输数据的控制方式通常有3种:查询方式、中断方式和直接内存存取(DMA)方式。
21.查询方式
设备驱动程序通过设备的I/O端口空间,以及存储器空间完成数据的交换。例如,网卡一般将自己的内部寄存器映射为设备的I/O端口,而显示卡则利用大量的存储器空间作为视频信息的存储空间。利用这些地址空间,驱动程序可以向外设发送指定的操作指令。通常来讲,由于外设的操作耗时较长,因此,当处理器实际执行了操作指令之后,驱动程序可采用查询方式等待外设完成操作。
2.2.中断方式
查询方式白白浪费了大量的处理器时间,而中断方式才是多任务操作系统中最有效利用处理器的方式。当CPU进行主程序操作时,外设的数据已存入端口的数据输入寄存器,或端口的数据输出寄存器已空,此时由外设通过接口电路向CPU发出中断请求信号。CPU在满足一定条件下,暂停执行当前正在执行的主程序,转入执行相应能够进行输入/输出操作的子程序,待输入/输出操作执行完毕之后,CPU再返回并继续执行原来被中断的主程序。这样,CPU就避免了把大量时间耗费在等待、查询外设状态的操作上,使其工作效率得以大大提高。中断方式的原理示意图如图6.1所示。

2.3.直接访问内存(DMA)方式
利用中断,系统和设备之间可以通过设备驱动程序传送数据,但是,当传送的数据量很大时,因为中断处理上的延迟,利用中断方式的效率会大大降低。而直接内存访问(DMA)可以解决这一问题。DMA可允许设备和系统内存间在没有处理器参与的情况下传输大量数据。设备驱动程序在利用DMA之前,需要选择DMA通道并定义相关寄存器,以及数据的传输方向,即读取或写入,然后将设备设定为利用该DMA通道传输数据。设备完成设置之后,可以立即利用该DMA通道在设备和系统的内存之间传输数据,传输完毕后产生中断以便通知驱动程序进行后续处理。在利用DMA进行数据传输的同时,处理器仍然可以继续执行指令。
3.驱动程序结构
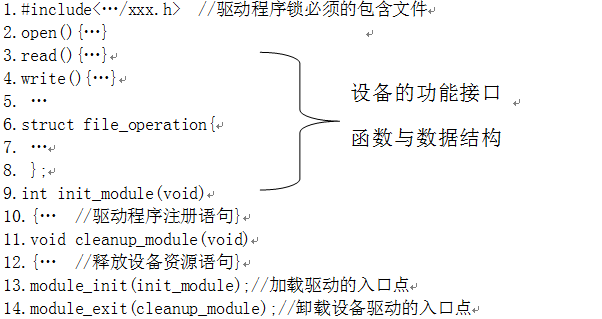
3.1一个设备驱动程序模块的基本框架

设备驱动程序流程图
在系统内部,I/O设备的存取通过一组固定的入口点来进行,入口点也可以理解为设备的句柄,就是对设备进行操作的基本函数。字符型设备驱动程序提供如下几个入口点:
— open入口点。打开设备准备I/O操作。对字符设备文件进行打开操作,都会调用设备的open入口点。open子程序必须对将要进行的I/O操作做好必要的准备工作,如清除缓冲区等。如果设备是独占的,即同一时刻只能有一个程序访问此设备,则open子程序必须设置一些标志以表示设备处于忙状态。
— close入口点。关闭一个设备。当最后一次使用设备完成后,调用close子程序。独占设备必须标记设备方可再次使用。
— read入口点。从设备上读数据。对于有缓冲区的I/O操作,一般是从缓冲区里读数据。对字符设备文件进行读操作将调用read子程序。
— write入口点。往设备上写数据。对于有缓冲区的I/O操作,一般是把数据写入缓冲区里。对字符设备文件进行写操作将调用write子程序。
— ioctl入口点。执行读、写之外的操作。
—select入口点。检查设备,看数据是否可读或设备是否可用于写数据。select系统调用在检查与设备文件相关的文件描述符时使用select入口点。
3.1. file_operations结构体
struct file_operations {
structmodule *owner;
loff_t(*llseek) (struct file *, loff_t, int);
ssize_t(*read) (struct file *, char *, size_t, loff_t *);
ssize_t(*write) (struct file *, const char *, size_t, loff_t *);
int(*readdir) (struct file *, void *, filldir_t);
unsignedint (*poll) (struct file *, struct poll_table_struct *);
int(*ioctl) (struct inode *, struct file *, unsigned int, unsigned long);
int (*mmap)(struct file *, struct vm_area_struct *);
int (*open)(struct inode *, struct file *);
int(*flush) (struct file *);
int(*release) (struct inode *, struct file *);
int(*fsync) (struct file *, struct dentry *, int datasync);
int(*fasync) (int, struct file *, int);
int (*lock)(struct file *, int, struct file_lock *);
ssize_t(*readv) (struct file *, const struct iovec *, unsigned long, loff_t *);
ssize_t(*writev) (struct file *, const struct iovec *, unsigned long, loff_t *);
ssize_t(*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsignedlong (*get_unmapped_area)(
struct file*,
unsignedlong,
unsignedlong,
unsignedlong,
unsignedlong
);
};
— lseek,移动文件指针的位置,只能用于可以随机存取的设备。
— read,进行读操作,buf为存放读取结果的缓冲区,count为所要读取的数据长度。
— write,进行写操作,与read类似。
— select,进行选择操作。
— ioctl,进行读、写以外的其他操作。
— mmap,用于把设备的内容映射到地址空间,一般只有块设备驱动程序使用。
— open,打开设备进行I/O操作。返回0表示成功,返回负数表示失败。
— release,即close操作
3.2.inode{}和file{}结构体
inode数据结构体提供关于特别设备文件的信息。file结构体主要是与文件系统对应的设备驱动程序使用。
struct file主要用于与文件系统相关的设备驱动程序,可提供关于被打开的文件的信息,定义如下:
struct file {
struct list_head f_list;
struct dentry *f_dentry;
struct vfsmount*f_vfsmnt;
struct file_operations *f_op;
atomic_t f_count;
unsigned int f_flags;
mode_t f_mode;
loff_t f_pos;
unsigned long f_reada,f_ramax, f_raend, f_ralen, f_rawin;
struct fown_struct f_owner;
unsigned int f_uid,f_gid;
int f_error;
unsigned long f_version;
/* needed for tty driver, and maybe others */
void *private_data;
/* preallocated helper kiobuf to speedup O_DIRECT */
struct kiobuf *f_iobuf;
long f_iobuf_lock;
};
在用户自己的驱动程序中,首先要根据驱动程序的功能,完成file_operations结构中函数的实现。不需要的函数接口可以直接在file_operations结构中初始化为NULL。file_operations中的变量会在驱动程序初始化时,注册到系统内部。每个进程对设备的操作,都会根据主次设备号,转换成对file_operations结构的访问。
4.设备注册和初始化
设备的驱动程序在加载的时候首先需要调用入口函数init_module(),该函数最重要的一个工作就是向内核注册该设备,对于字符设备调用register_chrdev()完成注册。register_chrdev 的定义为:int register_chrdev(unsignedint major, const char *name, struct file_ operations *fops);
其中,major是为设备驱动程序向系统申请的主设备号,如果为0,则系统为此驱动程序动态分配一个主设备号。name是设备名,fops是对各个调用的入口点说明。此函数返回0时表示成功;返回-EINVAL,表示申请的主设备号非法,主要原因是主设备号大于系统所允许的最大设备号;返回-EBUSY,表示所申请的主设备号正在被其他设备程序使用。如果动态分配主设备号成功,此函数将返回所分配的主设备号。如果register_chrdev()操作成功,设备名就会出现在/proc/dvices文件中。
Linux在/dev目录中为每个设备建立一个文件,用ls –l命令列出函数返回值,若小于0,则表示注册失败;返回0或者大于0的值表示注册成功。注册以后,Linux将设备名与主、次设备号联系起来。当有对此设备名的访问时,Linux通过请求访问的设备名得到主、次设备号,然后把此访问分发到对应的设备驱动,设备驱动再根据次设备号调用不同的函数。
当设备驱动模块从Linux内核中卸载,对应的主设备号必须被释放。字符设备在cleanup_module()函数中调用unregister_chrdev()来完成设备的注销。unregister_chrdev()的定义为:int unregister_chrdev(unsignedint major, const char *name);
此函数的参数为主设备号major和设备名name。Linux内核把name和major在内核注册的名称对比,如果不相等,卸载失败,并返回-EINVAL;如果major大于最大的设备号,也返回-EINVAL。
包括设备注册在内,设备驱动的初始化函数主要完成的功能是有以下5项。
(1)对驱动程序管理的硬件进行必要的初始化。
对硬件寄存器进行设置。比如,设置中断掩码,设置串口的工作方式、并口的数据方向等。
(2)初始化设备驱动相关的参数。
一般说来,每个设备都要定义一个设备变量,用以保存设备相关的参数。在这一步骤里对设备变量中的项进行初始化。
(3)在内核注册设备。
调用register_chrdev()函数来注册设备。
(4)注册中断。
如果设备需要IRQ支持,则要使用request_irq()函数注册中断。
(5)其他初始化工作。
初始化部分一般还负责给设备驱动程序申请包括内存、时钟、I/O端口等在内的系统资源,这些资源也可以在open子程序或者其他地方申请。这些资源不用时,应该释放,以利于资源的共享。
若驱动程序是内核的一部分,初始化函数则要按如下方式声明:
int __init chr_driver_init(void);
其中__init是必不可少的,在系统启动时会由内核调用chr_driver_init,完成驱动程序的初始化。
当驱动程序是以模块的形式编写时,则要按照如下方式声明:
int init_module(void)
当运行后面介绍的insmod命令插入模块时,会调用init_module函数完成初始化工作。
5.中断管理
设备驱动程序通过调用request_irq函数来申请中断,通过free_irq来释放中断。它们在linux/sched.h中的定义如下:
int request_irq(
unsigned int irq,
void (*handler)(int irq,void dev_id,structpt_regs *regs),
unsigned long flags,
const char *device,
void *dev_id
);
void free_irq(unsigned int irq, void*dev_id);
通常从request_irq函数返回的值为0时,表示申请成功;负值表示出现错误。
—irq表示所要申请的硬件中断号。
—handler为向系统登记的中断处理子程序,中断产生时由系统来调用,调用时所带参数irq为中断号,dev_id为申请时告诉系统的设备标识,regs为中断发生时寄存器内容。
—device为设备名,将会出现在/proc/interrupts文件里。
—flag是申请时的选项,它决定中断处理程序的一些特性,其中最重要的是决定中断处理程序是快速处理程序(flag里设置了SA_INTERRUPT)还是慢速处理程序(不设置SA_INTERRUPT)。
下面的代码将在SBC-2410X的Linux中注册外部中断2。
eint_irq = IRQ_EINT2;
set_external_irq (eint_irq, EXT_FALLING_EDGE,GPIO_PULLUP_DIS);
ret_val =request_irq(eint_irq,eint2_handler, “S3C2410Xeint2”,0);
if(ret_val < 0){
return ret_val;
}
用来打开和关闭中断的函数如下:
#define cli() _asm_ _volatile_("cli"::)
#define sli() _asm_ _volatile_("sli"::) 。
6.设备驱动程序的开发过程
由于嵌入式设备由于硬件种类非常丰富,在默认的内核发布版中不一定包括所有驱动程序。所以进行嵌入式Linux系统的开发,很大的工作量是为各种设备编写驱动程序。除非系统不使用操作系统,程序直接操纵硬件。嵌入式Linux系统驱动程序开发与普通Linux开发没有区别。可以在硬件生产厂家或者Internet上寻找驱动程序,也可以根据相近的硬件驱动程序来改写,这样可以加快开发速度。实现一个嵌入式Linux设备驱动的大致流程如下。
(1)查看原理图,理解设备的工作原理。一般嵌入式处理器的生产商提供参考电路,也可以根据需要自行设计。
(2)定义设备号。设备由一个主设备号和一个次设备号来标识。主设备号惟一标识了设备类型,即设备驱动程序类型,它是块设备表或字符设备表中设备表项的索引。次设备号仅由设备驱动程序解释,区分被一个设备驱动控制下的某个独立的设备。
(3)实现初始化函数。在驱动程序中实现驱动的注册和卸载。
(4)设计所要实现的文件操作,定义file_operations结构。
(5)实现所需的文件操作调用,如read、write等。
(6)实现中断服务,并用request_irq向内核注册,中断并不是每个设备驱动所必需的。
(7)编译该驱动程序到内核中,或者用insmod命令加载模块。
(8)测试该设备,编写应用程序,对驱动程序进行测试。
7.设备驱动开发的基本函数
7.1.I/O口函数
无论驱动程序多么复杂,归根结底,无非还是向某个端口或者某个寄存器位赋值,这个值只能是0或1。接收值的就是I/O口。与中断和内存不同,使用一个没有申请的I/O端口不会使处理器产生异常,也就不会导致诸如“segmentationfault”一类的错误发生。由于任何进程都可以访问任何一个I/O端口,此时系统无法保证对I/O端口的操作不会发生冲突,甚至因此而使系统崩溃。因此,在使用I/O端口前,也应该检查此I/O端口是否已有别的程序在使用,若没有,再把此端口标记为正在使用,在使用完以后释放它。
这样需要用到如下几个函数:
int check_region(unsigned int from,unsigned int extent);
void request_region(unsigned int from,unsigned int extent,const char *name);
void release_region(unsigned int from, unsignedint extent);
调用这些函数时的参数为:
— from表示所申请的I/O端口的起始地址;
— extent为所要申请的从from开始的端口数;
— name为设备名,将会出现在/proc/ioports文件里;
— check_region返回0表示I/O端口空闲,否则为正在被使用。
在申请了I/O端口之后,可以借助asm/io.h中的如下几个函数来访问I/O端口:
inline unsigned int inb(unsigned shortport);
inline unsigned int inb_p(unsigned shortport);
inline void outb(char value, unsigned shortport);
inline void outb_p(charvalue,unsigned short port);
其中inb_p和outb_p插入了一定的延时以适应某些低速的I/O端口。
7.2.时钟函数
在设备驱动程序中,一般都需要用到计时机制。在Linux系统中,时钟是由系统接管的,设备驱动程序可以向系统申请时钟。与时钟有关的系统调用有:
#include <asm/param.h>
#include <linux/timer.h>
void add_timer(struct timer_list * timer);
int del_timer(struct timer_list * timer);
inline void init_timer(struct timer_list *timer);
struct timer_list的定义为:
struct timer_list {
struct timer_list *next;
struct timer_list *prev;
unsigned long expires;
unsigned long data;
void (*function)(unsigned long d);
};
其中,expires是要执行function的时间。系统核心有一个全局变量jiffies表示当前时间,一般在调用add_timer时jiffies=JIFFIES+num,表示在num个系统最小时间间隔后执行function函数。系统最小时间间隔与所用的硬件平台有关,在核心里定义了常数HZ表示一秒内最小时间间隔的数目,则num*HZ表示num秒。系统计时到预定时间就调用function,并把此子程序从定时队列里删除,可见,如果想要每隔一定时间间隔执行一次的话,就必须在function里再一次调用add_timer。function的参数d即为timer里面的data项。
7.3.内存操作函数
作为系统核心的一部分,设备驱动程序在申请和释放内存时不是调用malloc和free,而代之以调用kmalloc和kfree,它们在linux/kernel.h中被定义为:
void * kmalloc(unsigned int len, intpriority);
void kfree(void * obj);
参数len为希望申请的字节数,obj为要释放的内存指针。priority为分配内存操作的优先级,即在没有足够空闲内存时如何操作,一般由取值GFP_KERNEL解决即可。
7.4.复制函数
在用户程序调用read、write时,因为进程的运行状态由用户态变为核心态,地址空间也变为核心地址空间。由于read、write中参数buf是指向用户程序的私有地址空间的,所以不能直接访问,必须通过下面两个系统函数来访问用户程序的私有地址空间。
#include <asm/segment.h>
void memcpy_fromfs(void * to,const void *from,unsigned long n);
void memcpy_tofs(void * to,const void *from,unsigned long n);
memcpy_fromfs由用户程序地址空间往核心地址空间复制,memcpy_tofs则反之。参数to为复制的目的指针,from为源指针,n为要复制的字节数。
在设备驱动程序里,可以调用printk来打印一些调试信息,printk的用法与printf类似。printk打印的信息不仅出现在屏幕上,同时还记录在文件syslog里。
8.模块加载与卸载
虽然模块作为内核的一部分,但并未被编译到内核中,它们被分别编译和链接成目标文件。Linux中模块可以用C语言编写,用gcc命令编译成模块*.o,在命令行里加上-c的参数和“-D__KERNEL__-DMODULE”参数。然后用depmod -a 使此模块成为可加载模块。模块用insmod命令加载,用rmmod命令来卸载,这两个命令分别调用init_module()和cleanup_ module()函数,还可以用lsmod命令来查看所有已加载的模块的状态。
insmod命令可将编译好的模块调入内存。内核模块与系统中其他程序一样是已链接的目标文件,但不同的是它们被链接成可重定位映像。insmod将执行一个特权级系统调用get_kernel_sysms()函数以找到内核的输出内容,insmod修改模块对内核符号的引用后,将再次使用特权级系统调用create_module()函数来申请足够的物理内存空间,以保存新的模块。内核将为其分配一个新的module结构,以及足够的内核内存,并将新模块添加在内核模块链表的尾部,然后将新模块标记为uninitialized。
利用rmmod命令可以卸载模块。如果内核中还在使用此模块,这个模块就不能被卸载。原因是如果设备文件正被一个进程打开就卸载还在使用的内核模块,并导致对内核模块的读/写函数所在内存区域的调用。如果幸运,没有其他代码被加载到那个内存区域,将得到一个错误提示;否则,另一个内核模块被加载到同一区域,这就意味着程序跳到内核中另一个函数的中间,结果是不可预见的。
9.实例剖析
9.1实例一
9.1.1驱动程序
/******************************
*LED_Driver 2007/09/20
*****************************/
#include<linux/config.h>
#include<linux/kernel.h>
#include<linux/sched.h>
#include<linux/timer.h>
#include<linux/init.h>
#include<linux/module.h>
#include<asm/hardware.h>
#defineGPIO_LED_MAJOR 97
#defineARM_GPIO_LED_DEBUG
#defineARM_GPIO_LED (GPIO96)
#defineLED_ON 0
#defineLED_OFF 1
#definectl_GPIO_LED1 1
#defineVERSION "ARM_GPIO_LED_2007/09/20"
voidshowversion(void)
{
printk("*********************************************\n");
printk("\t %s \t\n",VERSION);
printk("********************************************\n\n");
}
//------------------- READ ------------------------
ssize_tGPIO_LED_read (struct file * file ,char * buf, size_t count, loff_t * f_ops)
{
#ifdef ARM_GPIO_LED_DEBUG
printk ("GPIO_LED_read [--kernel--]\n");
#endif
return count;
}
//------------------- WRITE -----------------------
ssize_tGPIO_LED_write (struct file * file ,const char * buf, size_t count, loff_t *f_ops)
{
#ifdef ARM_GPIO_LED_DEBUG
printk("GPIO_LED_write [ --kernel--]\n");
#endif
return count;
}
//------------------- IOCTL -----------------------
ssize_tGPIO_LED_ioctl (struct inode * inode ,struct file * file, unsigned int cmd,long data)
{
#ifdef ARM_GPIO_LED_DEBUG
printk("GPIO_LED_ioctl [ --kernel--]\n");
#endif
switch (cmd)
{
case LED_ON : {GPCR3 |= 0x1;break;}
case LED_OFF: {GPSR3 |= 0x1;break;}
default :
{printk ("lcdcontrol : no cmd run [ --kernel--]\n"); return (-EINVAL);}
}
return 0;
}
//------------------- OPEN ------------------------
ssize_tGPIO_LED_open (struct inode * inode ,struct file * file)
{
#ifdef ARM_GPIO_LED_DEBUG
printk("GPIO_LED_open [ --kernel--]\n");
#endif
MOD_INC_USE_COUNT;
return 0;
}
//------------------- RELEASE/CLOSE ---------------
ssize_tGPIO_LED_release (struct inode * inode,struct file * file)
{
#ifdef ARM_GPIO_LED_DEBUG
printk ("GPIO_LED_release [ --kernel--]\n");
#endif
MOD_DEC_USE_COUNT;
return 0;
}
//-------------------------------------------------
structfile_operations GPIO_LED_ctl_ops ={
open: GPIO_LED_open,
read: GPIO_LED_read,
write: GPIO_LED_write,
ioctl: GPIO_LED_ioctl,
release: GPIO_LED_release,
};
//------------------- INIT ------------------------
staticint __init HW_GPIO_LED_CTL_init(void)
{
int ret = -ENODEV;
printk("Driver Loding.....................\n\n");
showversion();
// init GPIO
GPDR3 |= 0x00000001; // SET GPIO96 OUTPUTMODE
GPSR3 |= 0x00000001; // OFF THE LED
#ifdef ARM_GPIO_LED_DEBUG
printk (" GPLR3=%x\n",GPLR3);
printk (" GPDR3=%x \n",GPDR3);
#endif
ret = devfs_register_chrdev(GPIO_LED_MAJOR,"led_drv", &GPIO_LED_ctl_ops);
if( ret < 0 )
{
printk (" ARM: init_module failedwith %d\n [ --kernel--]", ret);
return ret;
}
else
{
printk(" ARM gpio_led_driverregister success!!! [ --kernel--]\n");
}
return ret;
}
staticint __init ARM_GPIO_LED_CTL_init(void)
{
intret = -ENODEV;
#ifdef ARM_GPIO_LED_DEBUG
printk("ARM_GPIO_LED_CTL_init [ --kernel--]\n");
#endif
ret = HW_GPIO_LED_CTL_init();
if (ret)
return ret;
return 0;
}
staticvoid __exit cleanup_GPIO_LED_ctl(void)
{
#ifdef ARM_GPIO_LED_DEBUG
printk("cleanup_GPIO_LED_ctl [ --kernel--]\n");
#endif
devfs_unregister_chrdev (GPIO_LED_MAJOR,"gpio_led_ctl" );
}
MODULE_DESCRIPTION("GPIO_led driver module");
MODULE_AUTHOR("zsm");
MODULE_LICENSE("GPL");//GPL协议证书信息
module_init(ARM_GPIO_LED_CTL_init);
module_exit(cleanup_GPIO_LED_ctl);
9.1.2用户程序
在编写用户应用程序过程中,考虑通过接口open()函数打开设备,再通过接口ioctl()函数来实现对LED的控制功能。

#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <fcntl.h> // open() close()
#include <unistd.h> // read() write()
#define DEVICE_NAME "/dev/led_drv"
#define LED_ON0
#define LED_OFF 1
int main(void)
{
intfd;
int ret;
char *i;
printf("\nstart GPIO_led_driver test\n\n");
fd= open(DEVICE_NAME, O_RDWR);
printf("fd= %d\n",fd);
if(fd == -1)
{
printf("open device %s error\n",DEVICE_NAME);
}
else
{
while(1)
{ ioctl(fd,LED_OFF);
sleep(1);
ioctl(fd,LED_ON);
sleep(1);
}
ret =close(fd);
printf("ret=%d\n",ret);
printf("close led_driver test\n");
}
return 0;
}
9.1.3执行效果
(1)Create:
[root@OURSELEC usb]# mknod /dev/led_drv c 97 0
(2)view:
[root@OURSELEC usb]# ls -l /dev/led_drv
crw-r--r--1 root root 97,0 Jan 1 01:29 /dev/led_drv
(3)insmod:
[root@OURSELEC usb]# insmod led_drv.o
Using led_drv.o
ARM_GPIO_LED_CTL_init [ --kernel--]
Driver Loding .....................
*********************************************
ARM_GPIO_LED_2007/09/20
*********************************************
GPLR3=73e7fd
GPDR3=1efffc3
ARMgpio_led_driver register success!!! [ --kernel--]
(4)./test_led:
[root@OURSELEC usb]# ./test_led
startGPIO_led_driver test
GPIO_LED_open[ --kernel--]
fd = 3
GPIO_LED_ioctl [ --kernel--]
GPIO_LED_ioctl [ --kernel--]
GPIO_LED_ioctl [ --kernel--]
GPIO_LED_ioctl [ --kernel--]
GPIO_LED_ioctl [ --kernel--]
GPIO_LED_ioctl [ --kernel--]
GPIO_LED_ioctl [ --kernel--]
GPIO_LED_ioctl [ --kernel--]
GPIO_LED_ioctl [ --kernel--]
GPIO_LED_ioctl [ --kernel--]
GPIO_LED_ioctl [ --kernel--]
GPIO_LED_release [ --kernel--]
(5) remove led_drv mode:
[root@OURSELEC usb]# rmmod led_drv
cleanup_GPIO_LED_ctl [ --kernel--]
9.2实例二
/*************************************
NAME:gt2440_leds.c
COPYRIGHT:www.e-online.cc
*************************************/
#include <linux/miscdevice.h>
#include <linux/delay.h>
#include <asm/irq.h>
#include <mach/regs-gpio.h>
#include <mach/hardware.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/init.h>
#include <linux/mm.h>
#include <linux/fs.h>
#include <linux/types.h>
#include <linux/delay.h>
#include <linux/moduleparam.h>
#include <linux/slab.h>
#include <linux/errno.h>
#include <linux/ioctl.h>
#include <linux/cdev.h>
#include <linux/string.h>
#include <linux/list.h>
#include <linux/pci.h>
#include <asm/uaccess.h>
#include <asm/atomic.h>
#include <asm/unistd.h>
#define DEVICE_NAME "leds"
/* 应用程序执行ioctl(fd, cmd, arg)时的第2个参数 */
#define IOCTL_LED_ON 1
#define IOCTL_LED_OFF 0
/* 用来指定LED所用的GPIO引脚 */
static unsigned long led_table [] =
{
S3C2410_GPB5,
S3C2410_GPB6,
S3C2410_GPB7,
S3C2410_GPB8,
};
/* 用来指定GPIO引脚的功能:输出 */
static unsigned int led_cfg_table [] =
{
S3C2410_GPB5_OUTP,
S3C2410_GPB6_OUTP,
S3C2410_GPB7_OUTP,
S3C2410_GPB8_OUTP,
};
static int gt2440_leds_ioctl(
structinode *inode,
structfile *file,
unsignedint cmd,
unsignedlong arg)
{
if(arg > 4)
{
return-EINVAL;
}
switch(cmd)
{
caseIOCTL_LED_ON:
//设置指定引脚的输出电平为0
s3c2410_gpio_setpin(led_table[arg], 0);
return0;
caseIOCTL_LED_OFF:
//设置指定引脚的输出电平为1
s3c2410_gpio_setpin(led_table[arg], 1);
return0;
default:
return-EINVAL;
}
}
static struct file_operations dev_fops = {
.owner = THIS_MODULE,
.ioctl = gt2440_leds_ioctl,
};
static struct miscdevice misc = {
.minor= MISC_DYNAMIC_MINOR,
.name= DEVICE_NAME,
.fops= &dev_fops,
};
static int __init dev_init(void)
{
intret;
inti;
for(i = 0; i < 4; i++)
{
s3c2410_gpio_cfgpin(led_table[i],led_cfg_table[i]);
s3c2410_gpio_setpin(led_table[i], 0);
}
ret= misc_register(&misc);
printk(DEVICE_NAME" initialized\n");
returnret;
}
static void __exit dev_exit(void)
{
misc_deregister(&misc);
}
module_init(dev_init);
module_exit(dev_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("www.e-online.cc");
MODULE_DESCRIPTION("LEDS control forGT2440 Board");
10块设备驱动程序的编写
块设备文件通常指一些需要以块(如512字节)的方式写入的设备,如IDE硬盘、SCSI硬盘、光驱等。它的驱动程序的编写过程与字符型设备驱动程序的编写有很大的区别。
为了把各种块设备的操作请求队列有效地组织起来,内核中设置了一个结构数组blk_dev,该数组中的元素类型是blk_dev_struct结构。这个结构由三个成分组成,其主体是执行操作的请求队列request_queue,还有一个函数指针queue。当这个指针不为0时,就调用这个函数来找到具体设备的请求队列。块设备驱动程序描述符是一个包含在<linux/blkdev.h>中的blk_dev_struct类型的数据结构,其定义如下所示:
struct blk_dev_struct {
request_queue_t request_queue;
queue_proc *queue;
void *date;
};
在这个结构中,请求队列request_queue是主体,包含了初始化之后的I/O 请求队列。
所有块设备的描述符都存放在blk_dev表struct blk_dev_structblk_dev[MAX_BLKDEV]中;每个块设备都对应着数组中的一项,可以使用主设备号进行检索。每当用户进程对一个块设备发出一个读写请求时,首先调用块设备所公用的函数generic_file_read(),generic_file_write()。如果数据存在在缓冲区中或缓冲区还可以存放数据,那么就同缓冲区进行数据交换。否则,系统会将相应的请求队列结构添加到其对应项的blk_dev_struct中,如下图所示:


10.1块设备驱动编写流程
块设备驱动程序的编写流程同字符设备驱动程序的编写流程很类似,也包括了注册和使
用两部分。但与字符驱动设备所不同的是,块设备驱动程序包括一个request请求队列。它是
当内核安排一次数据传输时在列表中的一个请求队列,用以最大化系统性能为原则进行排序。

块设备驱动程序流程图
10.2重要数据结构
Linux系统中有一个名为blkdevs的结构数组,它描述了一系列在系统中登记的块设备。数组blkdevs也使用设备的主设备号作为索引,其元素类型是device_struct结构。该结构中包括指向已登记的设备驱动程序名的指针和指向block_device_operations结构的指针。在block_device_operations结构中包含指向有关操作的函数指针。所以,该结构就是连接抽象的块设备操作与具体块设备类型的操作之间的枢纽。
10.2.1 struct bio
一个bio结构体是在通用块层或更底层对块设备i/o操作的的表示单位。通常1个bio对应1个I/O请求.
struct bio {
sector_tbi_sector; /* device address in 512 byte
sectors */
structbio *bi_next; /*request queue link */
structblock_device *bi_bdev;
unsignedlongbi_flags; /* status, command, etc */
unsignedlongbi_rw; /* bottom bits READ/WRITE,
* top bits priority
*/
unsignedshort bi_vcnt; /*how many bio_vec's */
unsignedshort bi_idx;/* current index into bvl_vec */
/* Numberofsegments in this BIO after
*physical address coalescing is performed.
*/
unsignedint bi_phys_segments;
unsignedint bi_size; /*residual I/O count */
/*
* Tokeep track of the max segment size, weaccount for the
*sizes of the first and last mergeablesegments in this bio.
*/
unsignedint bi_seg_front_size;
unsignedint bi_seg_back_size;
unsignedintbi_max_vecs; /* max bvl_vecs we can hold */
unsignedintbi_comp_cpu; /* completion CPU */
atomic_tbi_cnt; /*pin count*/
structbio_vec*bi_io_vec; /* the actual vec list */
bio_end_io_t*bi_end_io;
void*bi_private;
#if defined(CONFIG_BLK_DEV_INTEGRITY)
structbio_integrity_payload *bi_integrity; /*data integrity */
#endif
bio_destructor_t *bi_destructor; /* destructor */
/*
* Wecan inline a number of vecs at the end ofthe bio, to avoid
*double allocations for a small number ofbio_vecs. This member
* MUSTobviously be kept at the very end ofthe bio.
*/
structbio_vec bi_inline_vecs[0];
};
10.2.2 struct gendisk
struct gendisk { //表示一个独立的磁盘设备或分区
intmajor;/* major number of driver */
intfirst_minor; /*starting minor number*/
intminors; /* maximumnumber ofminors, =1 for
*disks that can't be partitioned. 每一个分区都有一个minor号*/
chardisk_name[DISK_NAME_LEN]; /* name ofmajor driver */
structdisk_part_tbl *part_tbl;
structhd_struct part0;
structblock_device_operations *fops;
structrequest_queue*queue;
void*private_data;
int flags;
struct device*driverfs_dev; // FIXME: remove
struct kobject*slave_dir;
structtimer_rand_state *random;
atomic_tsync_io; /* RAID */
structwork_struct async_notify;
#ifdefCONFIG_BLK_DEV_INTEGRITY
structblk_integrity *integrity;
#endif
int node_id;
};
struct device_struct {
const char *name;
struct file_operations *chops;
};
static struct device_structblkdevs[MAX_BLKDEV];
struct sbull_dev {
void **data;
int quantum;// thecurrent quantum size
int qset;// the current array size
unsigned long size;
unsigned int access_key;// used by sbulluid and sbullpriv
unsigned int usage;// lock the device while using it
unsigned int new_msg;
struct sbull_dev *next;// next listitem
};
与字符设备驱动程序一样,块设备驱动程序也包含一个file_operation结构,其结构定义一般如下所示:
struct file_operation blk_fops = {
NULL,//seek
block_read,//内核函数
block_write,//内核函数
NULL,//readdir
NULL,//poll
sbull_ioctl,// ioctl
NULL,//mmap
sbull_open,//open
NULL,//flush
sbull_release,//release
block_fsync,//内核函数
NULL,//fasync
sbull_check_media_change,//check media change
NULL,//revalidate
NULL,//lock
};
所有的块驱动程序都调用内核函数block_read()、block_write(),block_fsync()函数,所以在块设备驱动程序入口中不包含这些函数,只需包括ioctl()、open()
和release()函数即可。
(1)设备初始化
块设备的初始化过程要比字符设备复杂,它既需要像字符设备一样在引导内核时完成一定的
工作,还需要在内核编译时增加一些内容。块设备驱动程序初始化时,由驱动程序的init()完成。
块设备驱动程序初始化的工作主要包括:
· 检查硬件是否存在;
· 登记主设备号;
· 将fops结构的指针传递给内核;
· 利用register_blkdev()函数对设备进行注册:
if(register_blkdev(sbull_MAJOR,“sbull”,&sbull_fops)) {
printk(“Registering block device major:%d failed\n”,sbull_MAJOR);
return-EIO;
};
· 将request()函数的地址传递给内核:
blk_dev[sbull_MAJOR].request_fn= DEVICE_REQUEST;
· 将块设备驱动程序的数据容量传递给缓冲区:
#define sbull_HARDS_SIZE 512
#define sbull_BLOCK_SIZE 1024
static int sbull_hard = sbull_HARDS_SIZE;
static int sbull_soft = sbull_BLOCK_SIZE;
hardsect_size[sbull_MAJOR] = &sbull_hard;
blksize_size[sbull_MAJOR] = &sbull_soft;
在块设备驱动程序内核编译时,应把下列宏加到blk.h文件中:
#define MAJOR_NR sbull_MAJOR
#define DEVICE_NAME “sbull”
#define DEVICE_REQUEST sbull_request
#define DEVICE_NR(device) (MINOR(device))
#define DEVICE_ON(device)
#define DEVICE_OFF(device)
(2)request操作
Request操作涉及一个重要的数据结构如下。
struct request {
kdev_t rq_dev;
int cmd; // 读或写
int errors;
unsigned long sector;
char *buffer;
struct request *next;
};
对于具体的块设备,函数指针request_fn当然是不同的。块设备的读写操作都是由request()函数完成。所有的读写请求都存储在request结构的链表中。request()函数利用CURRENT宏
检查当前的请求。request()函数从INIT_REQUEST宏命令开始(它也在blk.h中定义),它对请求队列进行检查,保证请求队列中至少有一个请求在等待处理。如果没有请求(即CURRENT = 0),则INIT_REQUEST宏命令将使request()函数返回,任务结束。
假定队列中至少有一个请求,request()函数现在应处理队列中的第一个请求,当处理完
请求后,request()函数将调用end_request()函数。如果成功地完成了读写操作,那么应该用参数值1 调用end_request()函数;如果读写操作不成功,那么以参数值0 调用end_request()函数。如果队列中还有其他请求,那么将CURRENT 指针设为指向下一个请求。执行end_request()函数后,request()函数回到循环的起点,对下一个请求重复上面的处理过程。
(3)打开操作
(4)释放设备操作
(5)ioctl操作
10.3中断编程
很多Linux 的驱动都是通过中断的方式来进行内核和硬件的交互。
这是驱动程序申请中断和释放中断的调用。在include/linux/sched.h里声明。
request_irq()调用的定义:
int request_irq(unsigned int irq,
void (*handler)(int irq, void*dev_id, struct pt_regs *regs),
unsigned long irqflags,const char* devname,oid *dev_id);
irq 是要申请的硬件中断号。在Intel平台,范围是0~15。handler 是向系统登记的中断处理函数。这是一个回调函数,中断发生时,系统调用这个函数,传入的参数包括硬件中断号,device id,寄存器值。dev_id就是下面的request_irq时传递给系统的参数dev_id。irqflags是中断处理的一些属性。比较重要的有SA_INTERRUPT,标明中断处理程序是快速处理程序(设置SA_INTERRUPT)还是慢速处理程序(不设置SA_INTERRUPT)。快速处理程序
被调用时屏蔽所有中断。慢速处理程序不屏蔽。还有一个SA_SHIRQ 属性,设置了以后运行多个设备共享中断。dev_id在中断共享时会用到。一般设置为这个设备的device结构本身或者NULL。中断处理程序可以用dev_id找到相应的控制这个中断的设备,或者用irq2dev_map
找到中断对应的设备。void free_irq(unsigned int irq,void *dev_id);
10.4一个简单的块设备驱动
通过写一个建立在内存中的块设备驱动,来学习linux内核和相关设备驱动知识
#defineSIMP_BLKDEV_DISKNAME "simp_blkdev"
#defineSIMP_BLKDEV_BYTES (16*1024*1024)// 使用宏定义了块设备的大小,定为16M
#defineSIMP_BLKDEV_DEVICEMAJOR COMPAQ_SMART2_MAJOR
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
structblock_device_operations simp_blkdev_fops = {
.owner = THIS_MODULE,
};// gendisk结构需要设置fops指针,虽然我们用不到,但该设还是要设的
static structgendisk *simp_blkdev_disk;
static structrequest_queue *simp_blkdev_queue;// 指向块设备需要的请求队列
unsigned charsimp_blkdev_data[SIMP_BLKDEV_BYTES];
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
module_init(simp_blkdev_init);//然后申明模块的入口和出口
module_exit(simp_blkdev_exit);
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
static int __initsimp_blkdev_init(void) //在入口处添加这个设备、出口处删除这个设备
{
simp_blkdev_disk = alloc_disk(1); //在添加设备之前我们需要申请这个设备的资源,这用到了alloc_disk()函数
strcpy(simp_blkdev_disk->disk_name,SIMP_BLKDEV_DISKNAME); //设备有关的属性也是需要设置
simp_blkdev_disk->major = SIMP_BLKDEV_DEVICEMAJOR;
simp_blkdev_disk->first_minor = 0;
simp_blkdev_disk->fops =&simp_blkdev_fops;
simp_blkdev_disk->queue = simp_blkdev_queue;
set_capacity(simp_blkdev_disk, SIMP_BLKDEV_BYTES>>9);
add_disk(simp_blkdev_disk);
if (!simp_blkdev_disk) {
ret = -ENOMEM;
goto err_alloc_disk;
}
simp_blkdev_queue =blk_init_queue(simp_blkdev_do_request, NULL);//初始化请求队列
if (!simp_blkdev_queue) {
ret = -ENOMEM;
goto err_init_queue;
}//在加载模块时用simp_blkdev_do_request()函数的地址作参数
调用blk_init_queue()初始化一个请求队列
//用来从一个请求队列中拿出一条请求(其实严格来说,拿出的可能是请求中的一段)。
随后的处理请求本质上是根据rq_data_dir(req)返回的该请求的方向(读/写),把块设备中的数据装入req->buffer、或是把req->buffer中的数据写入块设备。
static voidsimp_blkdev_do_request(struct request_queue *q)//请求队列的处理函数。
{
struct request *req;
while ((req = elv_next_request(q)) != NULL) {
if ((req->sector +req->current_nr_sectors) << 9
> SIMP_BLKDEV_BYTES) {
printk(KERN_ERR SIMP_BLKDEV_DISKNAME
": bad request: block=%llu,count=%u\n",
(unsigned long long)req->sector,
req->current_nr_sectors);
end_request(req, 0);
continue;
}
switch (rq_data_dir(req)){
case READ:
memcpy(req->buffer,
simp_blkdev_data + (req->sector <<9),
req->current_nr_sectors << 9);
end_request(req, 1);
break;
case WRITE:
memcpy(simp_blkdev_data + (req->sector << 9),
req->buffer, req->current_nr_sectors<< 9);
end_request(req, 1);
break;
default:
/* No default because rq_data_dir(req) is 1 bit */
break;
}
}
}
return 0;
err_alloc_disk:
blk_cleanup_queue(simp_blkdev_queue);
err_init_queue:
return ret;}
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
static void __exit simp_blkdev_exit(void)
{
del_gendisk(simp_blkdev_disk);
put_disk(simp_blkdev_disk);
blk_cleanup_queue(simp_blkdev_queue);
}