ARMv8 Linux内核异常处理过程分析
看了Linaro提供的开源ARMv8 Linux内核源码,发现ARMv8异常处理与ARMv7及之前的架构有所不同,简单分析。
LinaroARMv8工程:http://www.linaro.org/engineering/engineering-projects/armv8
1.1 Linux内核异常处理相关文件
Linux内核中,异常处理主要由两个文件完成,entry.S和traps.c,当然还有一些其它异常处理函数分布于fault.c, memory.c等等。entry.S包含异常的入口、进入异常处理C函数前的压栈、退出C函数前的出栈、一些fork函数相关的处理代码(暂不分析)、任务切换汇编处理过程(cpu_switch_to函数,暂不分析)。traps.c主要包含异常处理C函数。
本文主要分析entry.S,对于traps.c作简要介绍。
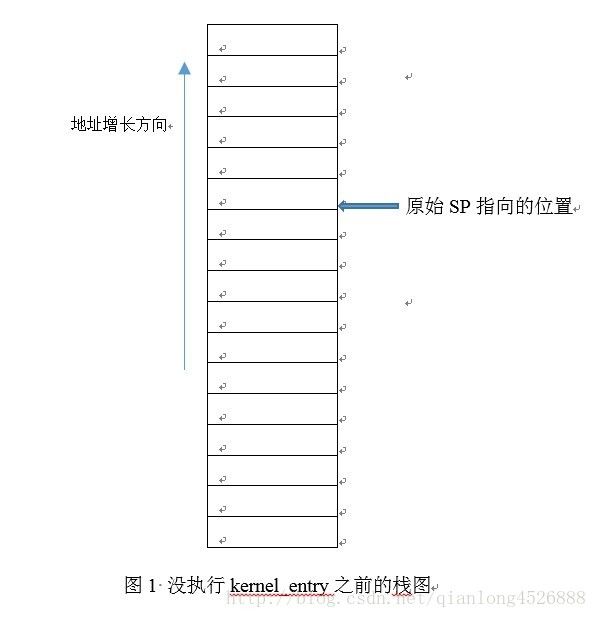
1.2 执行kernel_entry之前的栈
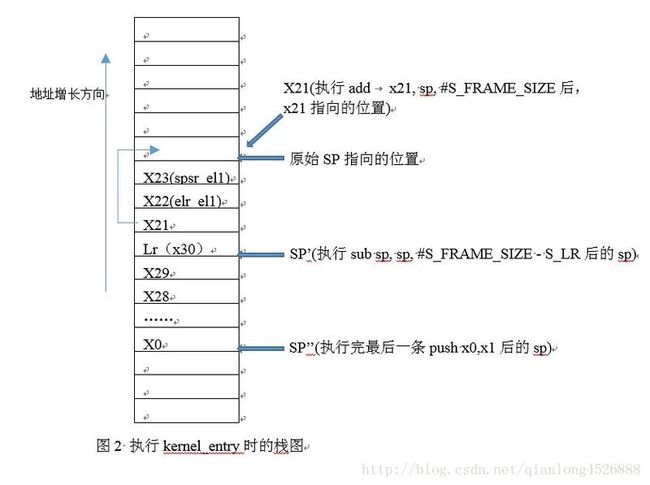
1.3 执行kernel_entry时的栈
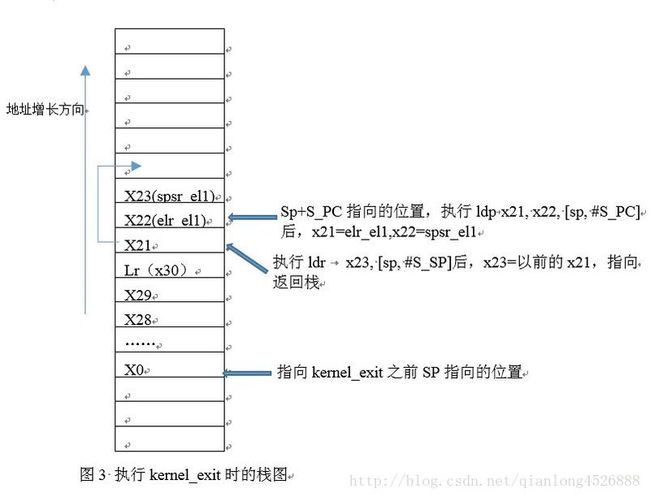
1.4 执行kernel_exit 时的栈
1.5 entry.s代码分析
/* * Low-level exception handling code * * Copyright (C) 2012 ARM Ltd. * Authors: Catalin Marinas <[email protected]> * Will Deacon <[email protected]> * * This program is free software; you can redistribute it and/or modify * it under the terms of the GNU General Public License version 2 as * published by the Free Software Foundation. * * This program is distributed in the hope that it will be useful, * but WITHOUT ANY WARRANTY; without even the implied warranty of * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the * GNU General Public License for more details. * * You should have received a copy of the GNU General Public License * along with this program. If not, see <http://www.gnu.org/licenses/>. */ #include <linux/init.h> #include <linux/linkage.h> #include <asm/assembler.h> #include <asm/asm-offsets.h> #include <asm/errno.h> #include <asm/thread_info.h> #include <asm/unistd.h> #include <asm/unistd32.h> /* * Bad Abort numbers *----------------- */ #define BAD_SYNC 0 #define BAD_IRQ 1 #define BAD_FIQ 2 #define BAD_ERROR 3 //根据该结构体内容 /* struct pt_regs { union { struct user_pt_regs user_regs;//结构体user_pt_regs和结构体pt_regs内容一样 struct { //共用体存储31个通用寄存器,外加sp,pc,pstate三个特殊寄存器 //该结构体用于异常处理的压栈弹栈操作 u64 regs[31]; u64 sp; u64 pc; u64 pstate; }; }; u64 orig_x0; u64 syscallno; }; */ //S_FRAME_SIZE定义在asm-offsets.c中,DEFINE(S_FRAME_SIZE,sizeof(struct pt_regs)); //即结构体pt_regs的大小,结构体pt_regs的定义见上面 //S_LR定义:DEFINE(S_LR,offsetof(struct pt_regs, regs[30])); //即31号寄存器在结构体pt_regs中的偏移量 //阅读以下内容请参考图1 和图2 .macro kernel_entry, el, regsize = 64 sub sp, sp, #S_FRAME_SIZE - S_LR // room for LR, SP, SPSR, ELR,见图2中sp'指向的位置 .if \regsize == 32 mov w0, w0 // zero upper 32 bits of x0 .endif /* *.macro push, xreg1, xreg2 //压栈两个寄存器 *stp \xreg1, \xreg2, [sp, #-16]! //注意!!!push指令也改变sp的值!!! *.endm */ push x28, x29 //进行压栈操作,push也是一个宏定义,因为ARMv8没有push指令,用stp代替 push x26, x27 push x24, x25 push x22, x23 push x20, x21 push x18, x19 push x16, x17 push x14, x15 push x12, x13 push x10, x11 push x8, x9 push x6, x7 push x4, x5 push x2, x3 push x0, x1 //此时sp指向位置见图2中sp'' .if \el == 0 //如果异常级是el0,把el0的sp栈指针给x21寄存器 mrs x21, sp_el0 .else add x21, sp, #S_FRAME_SIZE //如果异常级不是el0,把sp指针指向的地方加上pt_regs大小后的地址放入x21, //即指向没进入kernel_entry函数钱的sp指向的位置,见图2中x21指向的地址 .endif mrs x22, elr_el1 //把el1的lr寄存器给x22 mrs x23, spsr_el1 //把spsr给x23 stp lr, x21, [sp, #S_LR] //把lr,x21寄存器存入sp+S_LR指向的地方 stp x22, x23, [sp, #S_PC] //把lr,存入sp+s_PC指向的位置,用于异常返回 /* * Set syscallno to -1 by default (overridden later if real syscall). */ .if \el == 0 mvn x21, xzr str x21, [sp, #S_SYSCALLNO] .endif /* * Registers that may be useful after this macro is invoked: * * x21 - aborted SP * x22 - aborted PC * x23 - aborted PSTATE */ .endm .macro kernel_exit, el, ret = 0 //把此时sp(即图2中sp'')+S_PC位置处开始的16字节内容分别给x21,x22 //即把栈中存的x21和x22内容取出来 ldp x21, x22, [sp, #S_PC] // load ELR, SPSR .if \el == 0 ldr x23, [sp, #S_SP] // load return stack pointer,取出 .endif .if \ret ldr x1, [sp, #S_X1] // preserve x0 (syscall return),如果ret=1,则保存x0,用于系统调用,暂不分析 add sp, sp, S_X2 .else pop x0, x1 //如果ret=0,弹出x0,x1 .endif pop x2, x3 // load the rest of the registers pop x4, x5 pop x6, x7 pop x8, x9 msr elr_el1, x21 // set up the return data,把前面弹出的x21,x22分别赋值给elr_el1,spsr_el1 msr spsr_el1, x22 .if \el == 0 msr sp_el0, x23 .endif pop x10, x11 pop x12, x13 pop x14, x15 pop x16, x17 pop x18, x19 pop x20, x21 pop x22, x23 pop x24, x25 pop x26, x27 pop x28, x29 ldr lr, [sp], #S_FRAME_SIZE - S_LR // load LR and restore SP,把lr弹出 eret // return to kernel,异常返回,该指令会把lr给pc,完成跳转 .endm .macro get_thread_info, rd mov \rd, sp and \rd, \rd, #~((1 << 13) - 1) // top of 8K stack .endm /* * These are the registers used in the syscall handler, and allow us to * have in theory up to 7 arguments to a function - x0 to x6. * * x7 is reserved for the system call number in 32-bit mode. */ sc_nr .req x25 // number of system calls scno .req x26 // syscall number stbl .req x27 // syscall table pointer tsk .req x28 // current thread_info /* * Interrupt handling. */ .macro irq_handler ldr x1, handle_arch_irq mov x0, sp blr x1 .endm .text /* * Exception vectors. */ .macro ventry label //这里是2^7对齐,即对齐到内存地址的0x80 .align 7 b \label .endm .align 11 /* ENTRY也是一个宏,定义在include/linkage.h中 * #ifndef ENTRY * #define ENTRY(name) \ * .globl name; \ * ALIGN; \ * name: * #endif */ ENTRY(vectors) ventry el1_sync_invalid // Synchronous EL1t,ventry 是一个宏,见上面定义 ventry el1_irq_invalid // IRQ EL1t,这个版本的内核,对于XXX_invalid类异常都是不真正处理的。这里以el1_irq_invalid进行分析 ventry el1_fiq_invalid // FIQ EL1t ventry el1_error_invalid // Error EL1t ventry el1_sync // Synchronous EL1h,以el1级发生同步异常为例,详细分析内核异常处理过程 ventry el1_irq // IRQ EL1h ventry el1_fiq_invalid // FIQ EL1h ventry el1_error_invalid // Error EL1h ventry el0_sync // Synchronous 64-bit EL0 ventry el0_irq // IRQ 64-bit EL0 ventry el0_fiq_invalid // FIQ 64-bit EL0 ventry el0_error_invalid // Error 64-bit EL0 #ifdef CONFIG_COMPAT ventry el0_sync_compat // Synchronous 32-bit EL0 ventry el0_irq_compat // IRQ 32-bit EL0 ventry el0_fiq_invalid_compat // FIQ 32-bit EL0 ventry el0_error_invalid_compat // Error 32-bit EL0 #else ventry el0_sync_invalid // Synchronous 32-bit EL0 ventry el0_irq_invalid // IRQ 32-bit EL0 ventry el0_fiq_invalid // FIQ 32-bit EL0 ventry el0_error_invalid // Error 32-bit EL0 #endif END(vectors) /* * Invalid mode handlers */ .macro inv_entry, el, reason, regsize = 64 kernel_entry el, \regsize //kernel_entry是宏,主要完成寄存器压栈操作。 mov x0, sp //x0,x1,x2是传给函数bad_mode函数的参数。sp是当前栈指针。 mov x1, #\reason //x1是发生异常的原因,用于读取一个结构体,在函数bad_mode中会介绍 mrs x2, esr_el1 //通过分析bad_mode及其他函数,确定esr_el1是el1级异常分类寄存器, //用于在一个大类异常(例如syc异常)中细分异常类型 b bad_mode .endm el0_sync_invalid: inv_entry 0, BAD_SYNC ENDPROC(el0_sync_invalid) el0_irq_invalid: inv_entry 0, BAD_IRQ ENDPROC(el0_irq_invalid) el0_fiq_invalid: inv_entry 0, BAD_FIQ ENDPROC(el0_fiq_invalid) el0_error_invalid: inv_entry 0, BAD_ERROR ENDPROC(el0_error_invalid) #ifdef CONFIG_COMPAT el0_fiq_invalid_compat: inv_entry 0, BAD_FIQ, 32 ENDPROC(el0_fiq_invalid_compat) el0_error_invalid_compat: inv_entry 0, BAD_ERROR, 32 ENDPROC(el0_error_invalid_compat) #endif el1_sync_invalid: inv_entry 1, BAD_SYNC ENDPROC(el1_sync_invalid) el1_irq_invalid: inv_entry 1, BAD_IRQ //inv_entry是一个宏定义,主要工作就是将寄存器压栈后跳到bad_mode函数运行。 //后面紧跟的1代表异常级是el1,即内核态。 //BAD_IRQ定义在前面,值为1,代表发生异常的原因 ENDPROC(el1_irq_invalid) el1_fiq_invalid: inv_entry 1, BAD_FIQ ENDPROC(el1_fiq_invalid) el1_error_invalid: inv_entry 1, BAD_ERROR ENDPROC(el1_error_invalid) /* * EL1 mode handlers. */ .align 6 el1_sync: kernel_entry 1 //把寄存器信息压栈 //读异常类型寄存器 mrs x1, esr_el1 // read the syndrome register //逻辑右移26位,取31-27位 lsr x24, x1, #26 // exception class //判断异常类型 cmp x24, #0x25 // data abort in EL1 //如果是el1的数据中止(data_abort)异常,跳转到el1_da标号处 b.eq el1_da cmp x24, #0x18 // configurable trap b.eq el1_undef cmp x24, #0x26 // stack alignment exception b.eq el1_sp_pc cmp x24, #0x22 // pc alignment exception b.eq el1_sp_pc cmp x24, #0x00 // unknown exception in EL1 b.eq el1_undef cmp x24, #0x30 // debug exception in EL1 b.ge el1_dbg b el1_inv el1_da: /* * Data abort handling,数据中止异常处理函数 */ mrs x0, far_el1 //看过函数do_mem_abort内容后确定,far_el1寄存器是异常地址寄存器 /* 该宏定义在arm64/include/asm/assembler.h中: * .macro enable_dbg_if_not_stepping, tmp * mrs \tmp, mdscr_el1 //通过该宏名称确定,mdscr_el1寄存器是关于硬件debug的,不影响异常处理不分析 * tbnz \tmp, #1, 9990f * enable_dbg * 9990: * .endm */ //通过以上内容及该宏名称可以猜测,其作用只是根据条件决定是否开启dbg模式,不影响异常执行,不做分析 enable_dbg_if_not_stepping x2 // re-enable interrupts if they were enabled in the aborted context //根据x23(在kernel_entry中定义,存储spsr的值)判断是否开启中断 tbnz x23, #7, 1f // PSR_I_BIT enable_irq 1: mov x2, sp // struct pt_regs,sp中存储的是执行完kernel_entry后的值,其指向压栈后的栈顶,作为参数传给函数do_mem_abort //do_mem_abort函数在arm64/mm/fault.c中,分析见代码最后面 bl do_mem_abort //传给该函数的x0发生异常的地址信息,x1是异常类型,x2就是压入栈中的寄存器堆首地址。 // disable interrupts before pulling preserved data off the stack disable_irq kernel_exit 1 //异常返回,把所有压入栈中的寄存器弹出。对应于kernel_entry。 el1_sp_pc: /* * Stack or PC alignment exception handling */ mrs x0, far_el1 mov x1, x25 mov x2, sp b do_sp_pc_abort el1_undef: /* * Undefined instruction */ mov x0, sp b do_undefinstr el1_dbg: /* * Debug exception handling */ tbz x24, #0, el1_inv // EL1 only mrs x0, far_el1 mov x2, sp // struct pt_regs bl do_debug_exception kernel_exit 1 el1_inv: // TODO: add support for undefined instructions in kernel mode mov x0, sp mov x1, #BAD_SYNC mrs x2, esr_el1 b bad_mode ENDPROC(el1_sync) .align 6 el1_irq: kernel_entry 1 enable_dbg_if_not_stepping x0 #ifdef CONFIG_TRACE_IRQFLAGS bl trace_hardirqs_off #endif #ifdef CONFIG_PREEMPT get_thread_info tsk ldr x24, [tsk, #TI_PREEMPT] // get preempt count add x0, x24, #1 // increment it str x0, [tsk, #TI_PREEMPT] #endif irq_handler #ifdef CONFIG_PREEMPT str x24, [tsk, #TI_PREEMPT] // restore preempt count cbnz x24, 1f // preempt count != 0 ldr x0, [tsk, #TI_FLAGS] // get flags tbz x0, #TIF_NEED_RESCHED, 1f // needs rescheduling? bl el1_preempt 1: #endif #ifdef CONFIG_TRACE_IRQFLAGS bl trace_hardirqs_on #endif kernel_exit 1 ENDPROC(el1_irq) #ifdef CONFIG_PREEMPT el1_preempt: mov x24, lr 1: enable_dbg bl preempt_schedule_irq // irq en/disable is done inside ldr x0, [tsk, #TI_FLAGS] // get new tasks TI_FLAGS tbnz x0, #TIF_NEED_RESCHED, 1b // needs rescheduling? ret x24 #endif /* * EL0 mode handlers. */ .align 6 el0_sync: kernel_entry 0 mrs x25, esr_el1 // read the syndrome register lsr x24, x25, #26 // exception class cmp x24, #0x15 // SVC in 64-bit state b.eq el0_svc adr lr, ret_from_exception cmp x24, #0x24 // data abort in EL0 b.eq el0_da cmp x24, #0x20 // instruction abort in EL0 b.eq el0_ia cmp x24, #0x07 // FP/ASIMD access b.eq el0_fpsimd_acc cmp x24, #0x2c // FP/ASIMD exception b.eq el0_fpsimd_exc cmp x24, #0x18 // configurable trap b.eq el0_undef cmp x24, #0x26 // stack alignment exception b.eq el0_sp_pc cmp x24, #0x22 // pc alignment exception b.eq el0_sp_pc cmp x24, #0x00 // unknown exception in EL0 b.eq el0_undef cmp x24, #0x30 // debug exception in EL0 b.ge el0_dbg b el0_inv #ifdef CONFIG_COMPAT .align 6 el0_sync_compat: kernel_entry 0, 32 mrs x25, esr_el1 // read the syndrome register lsr x24, x25, #26 // exception class cmp x24, #0x11 // SVC in 32-bit state b.eq el0_svc_compat adr lr, ret_from_exception cmp x24, #0x24 // data abort in EL0 b.eq el0_da cmp x24, #0x20 // instruction abort in EL0 b.eq el0_ia cmp x24, #0x07 // FP/ASIMD access b.eq el0_fpsimd_acc cmp x24, #0x28 // FP/ASIMD exception b.eq el0_fpsimd_exc cmp x24, #0x00 // unknown exception in EL0 b.eq el0_undef cmp x24, #0x30 // debug exception in EL0 b.ge el0_dbg b el0_inv el0_svc_compat: /* * AArch32 syscall handling */ adr stbl, compat_sys_call_table // load compat syscall table pointer uxtw scno, w7 // syscall number in w7 (r7) mov sc_nr, #__NR_compat_syscalls b el0_svc_naked .align 6 el0_irq_compat: kernel_entry 0, 32 b el0_irq_naked #endif el0_da: /* * Data abort handling */ mrs x0, far_el1 disable_step x1 isb enable_dbg // enable interrupts before calling the main handler enable_irq mov x1, x25 mov x2, sp b do_mem_abort el0_ia: /* * Instruction abort handling */ mrs x0, far_el1 disable_step x1 isb enable_dbg // enable interrupts before calling the main handler enable_irq orr x1, x25, #1 << 24 // use reserved ISS bit for instruction aborts mov x2, sp b do_mem_abort el0_fpsimd_acc: /* * Floating Point or Advanced SIMD access */ mov x0, x25 mov x1, sp b do_fpsimd_acc el0_fpsimd_exc: /* * Floating Point or Advanced SIMD exception */ mov x0, x25 mov x1, sp b do_fpsimd_exc el0_sp_pc: /* * Stack or PC alignment exception handling */ mrs x0, far_el1 disable_step x1 isb enable_dbg // enable interrupts before calling the main handler enable_irq mov x1, x25 mov x2, sp b do_sp_pc_abort el0_undef: /* * Undefined instruction */ mov x0, sp b do_undefinstr el0_dbg: /* * Debug exception handling */ tbnz x24, #0, el0_inv // EL0 only mrs x0, far_el1 disable_step x1 mov x1, x25 mov x2, sp b do_debug_exception el0_inv: mov x0, sp mov x1, #BAD_SYNC mrs x2, esr_el1 b bad_mode ENDPROC(el0_sync) .align 6 el0_irq: kernel_entry 0 el0_irq_naked: disable_step x1 isb enable_dbg #ifdef CONFIG_TRACE_IRQFLAGS bl trace_hardirqs_off #endif get_thread_info tsk #ifdef CONFIG_PREEMPT ldr x24, [tsk, #TI_PREEMPT] // get preempt count add x23, x24, #1 // increment it str x23, [tsk, #TI_PREEMPT] #endif irq_handler #ifdef CONFIG_PREEMPT ldr x0, [tsk, #TI_PREEMPT] str x24, [tsk, #TI_PREEMPT] cmp x0, x23 b.eq 1f mov x1, #0 str x1, [x1] // BUG 1: #endif #ifdef CONFIG_TRACE_IRQFLAGS bl trace_hardirqs_on #endif b ret_to_user ENDPROC(el0_irq) /* * This is the return code to user mode for abort handlers */ ret_from_exception: get_thread_info tsk b ret_to_user ENDPROC(ret_from_exception) /* * Register switch for AArch64. The callee-saved registers need to be saved * and restored. On entry: * x0 = previous task_struct (must be preserved across the switch) * x1 = next task_struct * Previous and next are guaranteed not to be the same. * */ ENTRY(cpu_switch_to) add x8, x0, #THREAD_CPU_CONTEXT mov x9, sp stp x19, x20, [x8], #16 // store callee-saved registers stp x21, x22, [x8], #16 stp x23, x24, [x8], #16 stp x25, x26, [x8], #16 stp x27, x28, [x8], #16 stp x29, x9, [x8], #16 str lr, [x8] add x8, x1, #THREAD_CPU_CONTEXT ldp x19, x20, [x8], #16 // restore callee-saved registers ldp x21, x22, [x8], #16 ldp x23, x24, [x8], #16 ldp x25, x26, [x8], #16 ldp x27, x28, [x8], #16 ldp x29, x9, [x8], #16 ldr lr, [x8] mov sp, x9 ret ENDPROC(cpu_switch_to) /* * This is the fast syscall return path. We do as little as possible here, * and this includes saving x0 back into the kernel stack. */ ret_fast_syscall: disable_irq // disable interrupts ldr x1, [tsk, #TI_FLAGS] and x2, x1, #_TIF_WORK_MASK cbnz x2, fast_work_pending tbz x1, #TIF_SINGLESTEP, fast_exit disable_dbg enable_step x2 fast_exit: kernel_exit 0, ret = 1 /* * Ok, we need to do extra processing, enter the slow path. */ fast_work_pending: str x0, [sp, #S_X0] // returned x0 work_pending: tbnz x1, #TIF_NEED_RESCHED, work_resched /* TIF_SIGPENDING or TIF_NOTIFY_RESUME case */ ldr x2, [sp, #S_PSTATE] mov x0, sp // 'regs' tst x2, #PSR_MODE_MASK // user mode regs? b.ne no_work_pending // returning to kernel enable_irq // enable interrupts for do_notify_resume() bl do_notify_resume b ret_to_user work_resched: enable_dbg bl schedule /* * "slow" syscall return path. */ ENTRY(ret_to_user) disable_irq // disable interrupts ldr x1, [tsk, #TI_FLAGS] and x2, x1, #_TIF_WORK_MASK cbnz x2, work_pending tbz x1, #TIF_SINGLESTEP, no_work_pending disable_dbg enable_step x2 no_work_pending: kernel_exit 0, ret = 0 ENDPROC(ret_to_user) /* * This is how we return from a fork. */ ENTRY(ret_from_fork) bl schedule_tail get_thread_info tsk b ret_to_user ENDPROC(ret_from_fork) /* * SVC handler. */ .align 6 el0_svc: adrp stbl, sys_call_table // load syscall table pointer uxtw scno, w8 // syscall number in w8 mov sc_nr, #__NR_syscalls el0_svc_naked: // compat entry point stp x0, scno, [sp, #S_ORIG_X0] // save the original x0 and syscall number disable_step x16 isb enable_dbg enable_irq get_thread_info tsk ldr x16, [tsk, #TI_FLAGS] // check for syscall tracing tbnz x16, #TIF_SYSCALL_TRACE, __sys_trace // are we tracing syscalls? adr lr, ret_fast_syscall // return address cmp scno, sc_nr // check upper syscall limit b.hs ni_sys ldr x16, [stbl, scno, lsl #3] // address in the syscall table br x16 // call sys_* routine ni_sys: mov x0, sp b do_ni_syscall ENDPROC(el0_svc) /* * This is the really slow path. We're going to be doing context * switches, and waiting for our parent to respond. */ __sys_trace: mov x1, sp mov w0, #0 // trace entry bl syscall_trace adr lr, __sys_trace_return // return address uxtw scno, w0 // syscall number (possibly new) mov x1, sp // pointer to regs cmp scno, sc_nr // check upper syscall limit b.hs ni_sys ldp x0, x1, [sp] // restore the syscall args ldp x2, x3, [sp, #S_X2] ldp x4, x5, [sp, #S_X4] ldp x6, x7, [sp, #S_X6] ldr x16, [stbl, scno, lsl #3] // address in the syscall table br x16 // call sys_* routine __sys_trace_return: str x0, [sp] // save returned x0 mov x1, sp mov w0, #1 // trace exit bl syscall_trace b ret_to_user /* * Special system call wrappers. */ ENTRY(sys_execve_wrapper) mov x3, sp b sys_execve ENDPROC(sys_execve_wrapper) ENTRY(sys_clone_wrapper) mov x5, sp b sys_clone ENDPROC(sys_clone_wrapper) ENTRY(sys_rt_sigreturn_wrapper) mov x0, sp b sys_rt_sigreturn ENDPROC(sys_rt_sigreturn_wrapper) ENTRY(sys_sigaltstack_wrapper) ldr x2, [sp, #S_SP] b sys_sigaltstack ENDPROC(sys_sigaltstack_wrapper) ENTRY(handle_arch_irq) .quad 0 /* * Dispatch a data abort to the relevant handler. */ /* asmlinkage void __exception do_mem_abort(unsigned long addr, unsigned int esr, struct pt_regs *regs) { const struct fault_info *inf = fault_info + (esr & 63);//取esr所有有效位,用于选择fault_info数组中的相应处理函数,该数组定义在后面 struct siginfo info; if (!inf->fn(addr, esr, regs)) //如果处理成功(返回0),则直接返回,否则继续执行。 return; //异常处理不成功,打印出错信息,进一步处理,不做分析。这里假设异常处理正常返回。 pr_alert("Unhandled fault: %s (0x%08x) at 0x%016lx\n", inf->name, esr, addr); info.si_signo = inf->sig; info.si_errno = 0; info.si_code = inf->code; info.si_addr = (void __user *)addr; arm64_notify_die("", regs, &info, esr); } */ /* static struct fault_info { int (*fn)(unsigned long addr, unsigned int esr, struct pt_regs *regs);//相应的异常处理函数 int sig; int code; const char *name; } fault_info[] = { { do_bad, SIGBUS, 0, "ttbr address size fault" }, { do_bad, SIGBUS, 0, "level 1 address size fault" }, { do_bad, SIGBUS, 0, "level 2 address size fault" }, { do_bad, SIGBUS, 0, "level 3 address size fault" }, { do_translation_fault, SIGSEGV, SEGV_MAPERR, "input address range fault" }, { do_translation_fault, SIGSEGV, SEGV_MAPERR, "level 1 translation fault" }, { do_translation_fault, SIGSEGV, SEGV_MAPERR, "level 2 translation fault" }, { do_page_fault, SIGSEGV, SEGV_MAPERR, "level 3 translation fault" }, { do_bad, SIGBUS, 0, "reserved access flag fault" }, { do_bad, SIGSEGV, SEGV_ACCERR, "level 1 access flag fault" }, { do_bad, SIGSEGV, SEGV_ACCERR, "level 2 access flag fault" }, { do_page_fault, SIGSEGV, SEGV_ACCERR, "level 3 access flag fault" }, { do_bad, SIGBUS, 0, "reserved permission fault" }, { do_bad, SIGSEGV, SEGV_ACCERR, "level 1 permission fault" }, { do_sect_fault, SIGSEGV, SEGV_ACCERR, "level 2 permission fault" }, { do_page_fault, SIGSEGV, SEGV_ACCERR, "level 3 permission fault" }, { do_bad, SIGBUS, 0, "synchronous external abort" }, { do_bad, SIGBUS, 0, "asynchronous external abort" }, { do_bad, SIGBUS, 0, "unknown 18" }, { do_bad, SIGBUS, 0, "unknown 19" }, { do_bad, SIGBUS, 0, "synchronous abort (translation table walk)" }, { do_bad, SIGBUS, 0, "synchronous abort (translation table walk)" }, { do_bad, SIGBUS, 0, "synchronous abort (translation table walk)" }, { do_bad, SIGBUS, 0, "synchronous abort (translation table walk)" }, { do_bad, SIGBUS, 0, "synchronous parity error" }, { do_bad, SIGBUS, 0, "asynchronous parity error" }, { do_bad, SIGBUS, 0, "unknown 26" }, { do_bad, SIGBUS, 0, "unknown 27" }, { do_bad, SIGBUS, 0, "synchronous parity error (translation table walk" }, { do_bad, SIGBUS, 0, "synchronous parity error (translation table walk" }, { do_bad, SIGBUS, 0, "synchronous parity error (translation table walk" }, { do_bad, SIGBUS, 0, "synchronous parity error (translation table walk" }, { do_bad, SIGBUS, 0, "unknown 32" }, { do_bad, SIGBUS, BUS_ADRALN, "alignment fault" }, { do_bad, SIGBUS, 0, "debug event" }, { do_bad, SIGBUS, 0, "unknown 35" }, { do_bad, SIGBUS, 0, "unknown 36" }, { do_bad, SIGBUS, 0, "unknown 37" }, { do_bad, SIGBUS, 0, "unknown 38" }, { do_bad, SIGBUS, 0, "unknown 39" }, { do_bad, SIGBUS, 0, "unknown 40" }, { do_bad, SIGBUS, 0, "unknown 41" }, { do_bad, SIGBUS, 0, "unknown 42" }, { do_bad, SIGBUS, 0, "unknown 43" }, { do_bad, SIGBUS, 0, "unknown 44" }, { do_bad, SIGBUS, 0, "unknown 45" }, { do_bad, SIGBUS, 0, "unknown 46" }, { do_bad, SIGBUS, 0, "unknown 47" }, { do_bad, SIGBUS, 0, "unknown 48" }, { do_bad, SIGBUS, 0, "unknown 49" }, { do_bad, SIGBUS, 0, "unknown 50" }, { do_bad, SIGBUS, 0, "unknown 51" }, { do_bad, SIGBUS, 0, "implementation fault (lockdown abort)" }, { do_bad, SIGBUS, 0, "unknown 53" }, { do_bad, SIGBUS, 0, "unknown 54" }, { do_bad, SIGBUS, 0, "unknown 55" }, { do_bad, SIGBUS, 0, "unknown 56" }, { do_bad, SIGBUS, 0, "unknown 57" }, { do_bad, SIGBUS, 0, "implementation fault (coprocessor abort)" }, { do_bad, SIGBUS, 0, "unknown 59" }, { do_bad, SIGBUS, 0, "unknown 60" }, { do_bad, SIGBUS, 0, "unknown 61" }, { do_bad, SIGBUS, 0, "unknown 62" }, { do_bad, SIGBUS, 0, "unknown 63" }, }; */
1.6 traps.c代码分析
//该文件中代码原理很简单,目前暂不分析,若需要,后续再添上。
/*
* bad_mode handles the impossible case in the exception vector.
*/
//三个参数从左到右分别对应x0~x3,该函数的作用就是打印出错原因,跳转到panic()函数
asmlinkage void bad_mode(struct pt_regs *regs, int reason, unsigned int esr)
{
console_verbose();
pr_crit("Bad mode in %s handler detected, code 0x%08x\n",
handler[reason], esr);
die("Oops - bad mode", regs, 0);
local_irq_disable();
panic("bad mode");
}