Linux USB Gadget--软件结构
一. UDC层
这一层是与硬件相关层。相关文件s3c2410_udc.c s3c2410_udc.h。s3c2410设备控制器作为一个linux设备在这一层是作为platform设备而注册到linux设备模型中的。相关数据结构以及相关函数如下:
1 数据结构
struct s3c2410_udc {
spinlock_t lock;
struct s3c2410_ep ep[S3C2410_ENDPOINTS];
int address;
struct usb_gadget gadget;
struct usb_gadget_driver *driver;
struct s3c2410_request fifo_req;
u8 fifo_buf[EP_FIFO_SIZE];
u16 devstatus;
u32 port_status;
int ep0state;
unsigned got_irq : 1;
unsigned req_std : 1;
unsigned req_config : 1;
unsigned req_pending : 1;
u8 vbus;
struct dentry *regs_info;
};
struct s3c2410_udc {
spinlock_t lock;
struct s3c2410_ep ep[S3C2410_ENDPOINTS];
int address;
struct usb_gadget gadget;
struct usb_gadget_driver *driver;
struct s3c2410_request fifo_req;
u8 fifo_buf[EP_FIFO_SIZE];
u16 devstatus;
u32 port_status;
int ep0state;
unsigned got_irq : 1;
unsigned req_std : 1;
unsigned req_config : 1;
unsigned req_pending : 1;
u8 vbus;
struct dentry *regs_info;
}; s3c2410_udc.c中声明了一个结构体变量memory,这儿变量代表了S3C2410的USB设备控制器,包括各种信息。
staticstruct s3c2410_udc memory = {
.gadget = {
.ops = &s3c2410_ops,
.ep0 = &memory.ep[0].ep,
.name = gadget_name,
.dev = {
.init_name = "gadget",
},
},
/* control endpoint */
.ep[0] = {
.num = 0,
.ep = {
.name = ep0name,
.ops = &s3c2410_ep_ops,
.maxpacket = EP0_FIFO_SIZE,
},
.dev = &memory,
},
/* first group of endpoints */
.ep[1] = {
.num = 1,
.ep = {
.name = "ep1-bulk",
.ops = &s3c2410_ep_ops,
.maxpacket = EP_FIFO_SIZE,
},
.dev = &memory,
.fifo_size = EP_FIFO_SIZE,
.bEndpointAddress = 1,
.bmAttributes = USB_ENDPOINT_XFER_BULK,
},
.ep[2] = {
.num = 2,
.ep = {
.name = "ep2-bulk",
.ops = &s3c2410_ep_ops,
.maxpacket = EP_FIFO_SIZE,
},
.dev = &memory,
.fifo_size = EP_FIFO_SIZE,
.bEndpointAddress = 2,
.bmAttributes = USB_ENDPOINT_XFER_BULK,
},
.ep[3] = {
.num = 3,
.ep = {
.name = "ep3-bulk",
.ops = &s3c2410_ep_ops,
.maxpacket = EP_FIFO_SIZE,
},
.dev = &memory,
.fifo_size = EP_FIFO_SIZE,
.bEndpointAddress = 3,
.bmAttributes = USB_ENDPOINT_XFER_BULK,
},
.ep[4] = {
.num = 4,
.ep = {
.name = "ep4-bulk",
.ops = &s3c2410_ep_ops,
.maxpacket = EP_FIFO_SIZE,
},
.dev = &memory,
.fifo_size = EP_FIFO_SIZE,
.bEndpointAddress = 4,
.bmAttributes = USB_ENDPOINT_XFER_BULK,
}
};
static struct s3c2410_udc memory = {
.gadget = {
.ops = &s3c2410_ops,
.ep0 = &memory.ep[0].ep,
.name = gadget_name,
.dev = {
.init_name = "gadget",
},
},
/* control endpoint */
.ep[0] = {
.num = 0,
.ep = {
.name = ep0name,
.ops = &s3c2410_ep_ops,
.maxpacket = EP0_FIFO_SIZE,
},
.dev = &memory,
},
/* first group of endpoints */
.ep[1] = {
.num = 1,
.ep = {
.name = "ep1-bulk",
.ops = &s3c2410_ep_ops,
.maxpacket = EP_FIFO_SIZE,
},
.dev = &memory,
.fifo_size = EP_FIFO_SIZE,
.bEndpointAddress = 1,
.bmAttributes = USB_ENDPOINT_XFER_BULK,
},
.ep[2] = {
.num = 2,
.ep = {
.name = "ep2-bulk",
.ops = &s3c2410_ep_ops,
.maxpacket = EP_FIFO_SIZE,
},
.dev = &memory,
.fifo_size = EP_FIFO_SIZE,
.bEndpointAddress = 2,
.bmAttributes = USB_ENDPOINT_XFER_BULK,
},
.ep[3] = {
.num = 3,
.ep = {
.name = "ep3-bulk",
.ops = &s3c2410_ep_ops,
.maxpacket = EP_FIFO_SIZE,
},
.dev = &memory,
.fifo_size = EP_FIFO_SIZE,
.bEndpointAddress = 3,
.bmAttributes = USB_ENDPOINT_XFER_BULK,
},
.ep[4] = {
.num = 4,
.ep = {
.name = "ep4-bulk",
.ops = &s3c2410_ep_ops,
.maxpacket = EP_FIFO_SIZE,
},
.dev = &memory,
.fifo_size = EP_FIFO_SIZE,
.bEndpointAddress = 4,
.bmAttributes = USB_ENDPOINT_XFER_BULK,
}
};2 函数
platform设备需要注册一个platform_driver的结构体:
staticstruct platform_driver udc_driver_2410 = {
.driver = {
.name = "s3c2410-usbgadget",
.owner = THIS_MODULE,
},
.probe = s3c2410_udc_probe,
.remove = s3c2410_udc_remove,
.suspend = s3c2410_udc_suspend,
.resume = s3c2410_udc_resume,
};
static struct platform_driver udc_driver_2410 = {
.driver = {
.name = "s3c2410-usbgadget",
.owner = THIS_MODULE,
},
.probe = s3c2410_udc_probe,
.remove = s3c2410_udc_remove,
.suspend = s3c2410_udc_suspend,
.resume = s3c2410_udc_resume,
}; 结构体中的相关函数需要自己实现。最关键的函数就是s3c2410_udc_probe。这个函数在platform总线为驱动程序找到合适的设备后调用,在函数内初始化设备的时钟,申请io资源以及irq资源初始化platform设备结构体struct s3c2410_udc memory。
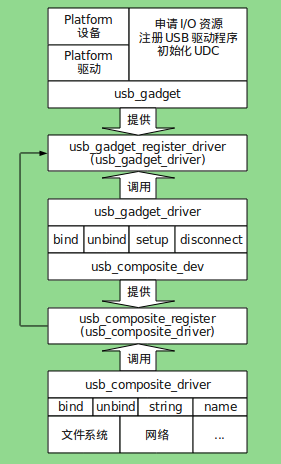
以上的数据结构以及函数是UDC的硬件层,不同的UDC采取不同的策略。s3c2410是集成的USB设备控制器,所以就是采用platform驱动的形式来注册的。如果系统是外接的USB设备控制器,那么则会采用相应总线的注册形式,比如PCI等。platform驱动的唯一目的就是分配资源以及初级初始化硬件,对于USB设备层和功能驱动层都没有影响。UDC层与USB设备层是通过另外的数据结构进行交互的。这种方式就是使用两个结构体与两个函数, 两个结构体分别是struct usb_gadget与struct usb_gadget_driver,他们都是嵌入在struct s3c2410_udc结构中的,但是是由不同软件层的代码初始化的。首先看struct usb_gadget,他是在定义memory的时候就进行了初始化,是在UDC层中初始化的。而struct usb_gadget_driver是在USB设备层中初始化的,他是通过usb_gadget_register_driver(struct usb_gadget_driver *driver)函数从USB设备层传过来然后赋值给memory的。这里出现一个关键的函数usb_gadget_register_driver(struct usb_gadget_driver *driver)这个函数就是UDC层与USB设备层进行交互的函数。设备设备层通过调用它与UDC层联系在一起。这个函数将usb_gadget与usb_gadget_driver联系在一起。向USB设备层提供usb_gadget_register_driver(struct usb_gadget_driver *driver)是UDC层的基本任务,但是UDC层要做的不仅如此,UDC层还需要提供为usb_gadget服务的相关函数,这些函数会通过usb_gadget传递给USB设备层。UDC层还需要提供USB设备的中断处理程序,中断处理尤其重要。因为所有的USB传输都是由主机发起,而有没有USB传输完全由USB中断判定,所以USB中断处理程序是整个软件架构的核心。UDC层主要提供以下的函数与数据结构:
(1) usb_gadget操作函数集合
staticconststruct usb_gadget_ops s3c2410_ops = {
.get_frame = s3c2410_udc_get_frame,
.wakeup = s3c2410_udc_wakeup,
.set_selfpowered = s3c2410_udc_set_selfpowered,
.pullup = s3c2410_udc_pullup,
.vbus_session = s3c2410_udc_vbus_session,
.vbus_draw = s3c2410_vbus_draw,
};
static const struct usb_gadget_ops s3c2410_ops = {
.get_frame = s3c2410_udc_get_frame,
.wakeup = s3c2410_udc_wakeup,
.set_selfpowered = s3c2410_udc_set_selfpowered,
.pullup = s3c2410_udc_pullup,
.vbus_session = s3c2410_udc_vbus_session,
.vbus_draw = s3c2410_vbus_draw,
}; 这些函数都是由UDC层来实现的。
(2) 端点操作函数集合
staticconststruct usb_ep_ops s3c2410_ep_ops = {
.enable = s3c2410_udc_ep_enable,
.disable = s3c2410_udc_ep_disable,
.alloc_request = s3c2410_udc_alloc_request,
.free_request = s3c2410_udc_free_request,
.queue = s3c2410_udc_queue,
.dequeue = s3c2410_udc_dequeue,
.set_halt = s3c2410_udc_set_halt,
};
static const struct usb_ep_ops s3c2410_ep_ops = {
.enable = s3c2410_udc_ep_enable,
.disable = s3c2410_udc_ep_disable,
.alloc_request = s3c2410_udc_alloc_request,
.free_request = s3c2410_udc_free_request,
.queue = s3c2410_udc_queue,
.dequeue = s3c2410_udc_dequeue,
.set_halt = s3c2410_udc_set_halt,
};(3) USB 中断处理程序
static irqreturn_t s3c2410_udc_irq(int dummy, void *_dev)
static irqreturn_t s3c2410_udc_irq(int dummy, void *_dev)(4) 其他相关辅助函数,比如调试相关函数。
二 USB设备层
USB设备层,虽然名字上与设备相关。但是属于硬件无关层。这一层相关的代码是composite.c,composite.h。这一层的功能是隔离Gadget功能驱动与硬件相关层。使得功能驱动直接与USB设备层交互不用考虑硬件的相关细节。还有USB设备层提供了USB设备的一些基本数据结构,不同的Gadget功能驱动可以共同调用。如果没有这一层,则每一个功能驱动都需要实现自己的USB设备,导致了代码重用率很高。这一层向下与UDC层进行交互,向上与Gadget功能驱动层进行交互。在UDC层已经介绍了USB设备层向下与UDC层交互方式主要是通过调用usb_gadget_register_driver(struct usb_gadget_driver *driver),这个函数是UDC层提供的。而这个函数传递的参数就是一个usb_gadget_driver的结构体。以下是这个结构体定义:
struct usb_gadget_driver {
char *function;
enum usb_device_speed speed;
int (*bind)(struct usb_gadget *);
void (*unbind)(struct usb_gadget *);
int (*setup)(struct usb_gadget *,
conststruct usb_ctrlrequest *);
void (*disconnect)(struct usb_gadget *);
void (*suspend)(struct usb_gadget *);
void (*resume)(struct usb_gadget *);
/* FIXME support safe rmmod */
struct device_driver driver;
};
struct usb_gadget_driver {
char *function;
enum usb_device_speed speed;
int (*bind)(struct usb_gadget *);
void (*unbind)(struct usb_gadget *);
int (*setup)(struct usb_gadget *,
const struct usb_ctrlrequest *);
void (*disconnect)(struct usb_gadget *);
void (*suspend)(struct usb_gadget *);
void (*resume)(struct usb_gadget *);
/* FIXME support safe rmmod */
struct device_driver driver;
}; 在composite.c中声明了一个这样的一个结构体变量:composite_driver,这个结构体变量就是传给usb_gadget_register_driver(struct usb_gadget_driver *driver)的参数。
staticstruct usb_gadget_driver composite_driver = {
.speed = USB_SPEED_HIGH,
.bind = composite_bind,
.unbind = __exit_p(composite_unbind),
.setup = composite_setup,
.disconnect = composite_disconnect,
.suspend = composite_suspend,
.resume = composite_resume,
.driver = {
.owner = THIS_MODULE,
},
};
static struct usb_gadget_driver composite_driver = {
.speed = USB_SPEED_HIGH,
.bind = composite_bind,
.unbind = __exit_p(composite_unbind),
.setup = composite_setup,
.disconnect = composite_disconnect,
.suspend = composite_suspend,
.resume = composite_resume,
.driver = {
.owner = THIS_MODULE,
},
}; 以上所有的函数集都需要自己实现,这些函数的大部分参数都是usb_gadget。可以看出这些函数都是与UDC层相关的。以上数据结构是与UDC进行交互的,下面的数据结构以及函数是USB设备层与Gadget功能驱动层进行交互的。
(1) 数据结构
struct usb_composite_dev {
struct usb_gadget *gadget;
struct usb_request *req;
unsigned bufsiz;
struct usb_configuration *config;
/* private: */
/* internals */
struct usb_device_descriptor desc;
struct list_head configs;
struct usb_composite_driver *driver;
u8 next_string_id;
/* the gadget driver won't enable the data pullup
* while the deactivation count is nonzero.
*/
unsigned deactivations;
/* protects at least deactivation count */
spinlock_t lock;
};
struct usb_composite_dev {
struct usb_gadget *gadget;
struct usb_request *req;
unsigned bufsiz;
struct usb_configuration *config;
/* private: */
/* internals */
struct usb_device_descriptor desc;
struct list_head configs;
struct usb_composite_driver *driver;
u8 next_string_id;
/* the gadget driver won't enable the data pullup
* while the deactivation count is nonzero.
*/
unsigned deactivations;
/* protects at least deactivation count */
spinlock_t lock;
}; 这个结构代表一个USB设备。可以看出结构体中有设备描述符以及配置。还有指向usb_gadget与usb_compsite_driver的指针。说明这个结构体联系了UDC层与功能驱动层。这个结构内嵌在了usb_gadget中,是在composite_bind函数中分配与初始化的。
struct usb_composite_driver {
constchar *name;
conststruct usb_device_descriptor *dev;
struct usb_gadget_strings **strings;
/* REVISIT: bind() functions can be marked __init, which
* makes trouble for section mismatch analysis. See if
* we can't restructure things to avoid mismatching...
*/
int (*bind)(struct usb_composite_dev *);
int (*unbind)(struct usb_composite_dev *);
/* global suspend hooks */
void (*suspend)(struct usb_composite_dev *);
void (*resume)(struct usb_composite_dev *);
};
struct usb_composite_driver {
const char *name;
const struct usb_device_descriptor *dev;
struct usb_gadget_strings **strings;
/* REVISIT: bind() functions can be marked __init, which
* makes trouble for section mismatch analysis. See if
* we can't restructure things to avoid mismatching...
*/
int (*bind)(struct usb_composite_dev *);
int (*unbind)(struct usb_composite_dev *);
/* global suspend hooks */
void (*suspend)(struct usb_composite_dev *);
void (*resume)(struct usb_composite_dev *);
}; 这个结构体代表一个USB设备驱动,是联系功能驱动的主要数据结构。由功能驱动层声明并初始化。
(2) 函数
int __init usb_composite_register(struct usb_composite_driver *driver)
{
if (!driver || !driver->dev || !driver->bind || composite)
return -EINVAL;
if (!driver->name)
driver->name = "composite";
composite_driver.function = (char *) driver->name;
composite_driver.driver.name = driver->name;
composite = driver;
return usb_gadget_register_driver(&composite_driver);
}
int __init usb_composite_register(struct usb_composite_driver *driver)
{
if (!driver || !driver->dev || !driver->bind || composite)
return -EINVAL;
if (!driver->name)
driver->name = "composite";
composite_driver.function = (char *) driver->name;
composite_driver.driver.name = driver->name;
composite = driver;
return usb_gadget_register_driver(&composite_driver);
} 这个函数是由Gadget功能驱动层调用的,他简单初始化了composite_driver。然后调用usb_gadget_register_driver。composite是usb_composite_drver类型的全局指针这里赋值了功能驱动传递过来的driver。所以功能驱动层与USB设备层联系在了一起,usb_gadget_register_driver调用后UDC层与USB设备层联系到了一起。usb_composite_register是在功能驱动的模块初始化的函数中进行的调用。所以只要功能驱动一加载,三个软件层就通过数据结构联系在了一起。
三 Gadget 功能驱动层
Gadget 功能驱动层是USB Gadget软件结构的最上层。主要是实现USB设备的功能,这一层通常与linux内核的其他层有密切的联系。模拟U盘的gadget就与文件系统层与块IO层有着联系。这里主要介绍最简单的Gadget 功能驱动zero。这一层包括zero.c。该驱动是作为一个模块注册到内核的,首先看一下他的模块初始化函数:
staticint __init init(void)
{
return usb_composite_register(&zero_driver);
}
static int __init init(void)
{
return usb_composite_register(&zero_driver);
} 非常简单,只调用了usb_composite_register,上面已经说到这个函数一旦调用三个软件层就联系到了一起。函数的参数是zero_driver。这是一个usb_composite_driver的结构体,有如下声明:
staticstruct usb_composite_driver zero_driver = {
.name = "zero",
.dev = &device_desc,
.strings = dev_strings,
.bind = zero_bind,
.unbind = zero_unbind,
.suspend = zero_suspend,
.resume = zero_resume,
};
static struct usb_composite_driver zero_driver = {
.name = "zero",
.dev = &device_desc,
.strings = dev_strings,
.bind = zero_bind,
.unbind = zero_unbind,
.suspend = zero_suspend,
.resume = zero_resume,
}; zero只要实现上面的函数集合就可以了,至此Linux下USB Gadget软件结构就分析完了。这个只是三层怎样联系起来的,但是数据怎样传输的还得另行分析。主要软件结构如下图所示: