【STM32 .Net MF开发板学习-15】红外遥控智能小车
【STM32 .Net MF开发板学习-15】红外遥控智能小车

2010-09-28 22:59:09
标签:
.NetMF [ 推送到技术圈]
|
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章 原始出处 、作者信息和本声明。否则将追究法律责任。 http://yfsoft.blog.51cto.com/1635641/398775
|
|
我前段时间写了《
用PWM驱动智能小车
》和《
红外遥控器编码识别
》两篇博文,分别介绍了如何用PWM
驱动直流电机及红外遥控器编码识别,这一次我们把二者结合起来,用红外遥控器遥控智能小车。
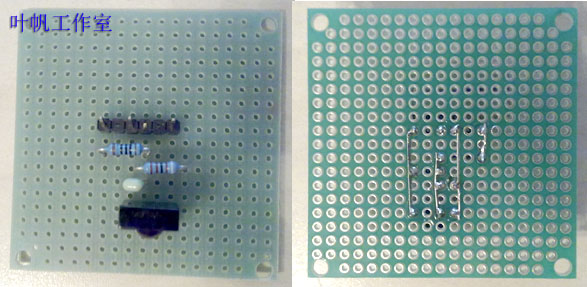
在《
红外遥控器编码识别
》中,我们用面包板搭建简单的电路,来验证红外接收信号,但是放在小车上是不行的,相关器件我们需要进行焊接,最终完成图如下。
我们把智能小车和红外板拼装在一起,最终完成图如下:
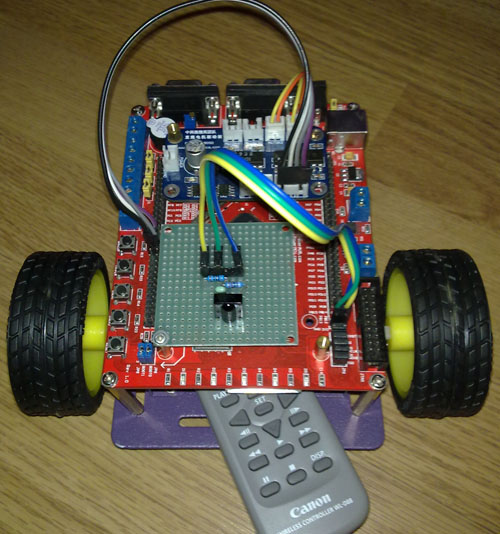
需要注意的是,PWM
信号输出时,对红外接收信号有比较大的干扰,所以尽可能让两路信号离的远一些,杜邦线质量也要好一些。
我们把小车分5
种状态:前进、后退、左转、右转、停止
1、
前进代码
static void MoveForward()
{
Lc.Write(true);
pwm.Start(PWM.Channels.CH1, 1, PWM.Mode.PWM1); //PA6
Rc.Write(true);
pwm.Start(PWM.Channels.CH2, 1, PWM.Mode.PWM1); //PA7
}
2、
后退代码
static void MoveBack()
{
Lc.Write(false); pwm.Start(PWM.Channels.CH1, 99, PWM.Mode.PWM1); //PA6 Rc.Write(false); pwm.Start(PWM.Channels.CH2, 99, PWM.Mode.PWM1); //PA7
}
3、
左转代码
static void MoveLeft()
{
Lc.Write(false);
pwm.Start(PWM.Channels.CH1, 99, PWM.Mode.PWM1); //PA6
Rc.Write(true);
pwm.Start(PWM.Channels.CH2, 1, PWM.Mode.PWM1); //PA7
}
左转代码有两种实现方法,一种是左轮静止,右轮正转,另一种是左轮倒转,右轮正传,这种转圈的速度更快,当然也可以让两轮都正传,左轮转的慢,右轮转的快,也可以进行左转弯。
4、
右转代码
static
void MoveRight()
{
Lc.Write(true);
pwm.Start(PWM.Channels.CH1, 1, PWM.Mode.PWM1); //PA6
Rc.Write(false);
pwm.Start(PWM.Channels.CH2, 99, PWM.Mode.PWM1); //PA7
}
右转处理代码和左转恰好相反。
5、
停止代码
static void MoveStop()
{
Lc.Write(false);
pwm.Start(PWM.Channels.CH1, 0, PWM.Mode.PWM1); //PA6
Rc.Write(false);
pwm.Start(PWM.Channels.CH2, 0, PWM.Mode.PWM1); //PA7
pwm.Stop(PWM.Channels.CH1);
pwm.Stop(PWM.Channels.CH2);
}
红外遥控器我们也没有必须识别全部的按钮编码,我们仅识别5
个按键即可,前后左右和确认键。
1
、声明红外控制类,并绑定相关处理事件
IRController
IR = new IRController(3, (int)GPIO_NAMES.PB12);
IR.IREvent += new IRController.IREventHandler(IR_Click);
2
、红外事件处理函数
static void IR_Click(byte[] buff, DateTime time)
{
IRData.Key key = IRData.GetKey(buff);//
编码识别
if (key != IRData.Key.None)
{
switch (key)
{
case IRData.Key.Forward:
MoveForward();
break;
case IRData.Key.Left:
MoveLeft();
break;
case IRData.Key.Right:
MoveRight();
break;
case IRData.Key.Back:
MoveBack();
break;
case IRData.Key.Stop:
MoveStop();
break;
}
}
}
程序编写完毕后,部署到开发板上,拿起遥控器我们就可以遥控小车运行了,相关控制视频如下:
http://video.sina.com.cn/v/b/38689146-1804832611.html
【本文相关模块或组件】
(1
)、小车底盘
http://item.taobao.com/item.htm?id=7218838776
(2
)、四路直流电机驱动器
http://item.taobao.com/item.htm?id=7218717808
(3
)、.NET Micro Framework
开发板
http://item.taobao.com/item.htm?id=7117999726
注:
需要红牛开发板固件在 V1.0.0
以上
本文源码:
http://www.sky-walker.com.cn/yefan/MFV40/SourceCode/IRCarTest.rar
MF
快速参考: .NET Micro Framework
快速入门
MF
中文讨论组: http://space.cnblogs.com/group/MFSoft/
微软官方论坛: MSDN
微软中文技术论坛(.NET Micro Framework)
开发板简明手册: http://blog.sina.com.cn/s/blog_6b938f630100kh0k.html
【低价开发板】
http://item.taobao.com/item.htm?id=7117999726
本文出自 “ 叶帆工作室” 博客,请务必保留此出处 http://yfsoft.blog.51cto.com/1635641/398775
|