信息安全系统设计基础第十一周学习总结
第八章 异常控制流实践
学习目标:
代码阅读理解:掌握进程控制
掌握信号处理的方法
掌握管道和fifo进行进程间通信的方法
一、运行代码
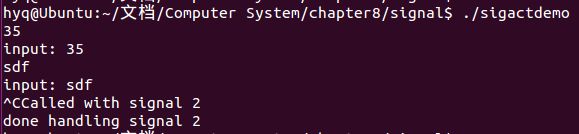
sigactdemo
#include <stdio.h>
#include <unistd.h>
#include <signal.h>
#define INPUTLEN 100
void inthandler();
int main()
{
struct sigaction newhandler;
sigset_t blocked;
char x[INPUTLEN];
newhandler.sa_handler = inthandler;
newhandler.sa_flags = SA_RESTART|SA_NODEFER|SA_RESETHAND;
sigemptyset(&blocked);
sigaddset(&blocked, SIGQUIT);
newhandler.sa_mask = blocked;
if (sigaction(SIGINT, &newhandler, NULL) == -1)
perror("sigaction");
else
while (1) {
fgets(x, INPUTLEN, stdin);
printf("input: %s", x);
}
return 0;
}
void inthandler(int s)
{
printf("Called with signal %d\n", s);
sleep(s * 4);
printf("done handling signal %d\n", s);
}
参数结构sigaction定义如下
struct sigaction { void (*sa_handler)(int); void (*sa_sigaction)(int, siginfo_t *, void *); sigset_t sa_mask; int sa_flags; void (*sa_restorer)(void); }- flag
- SA_RESETHAND:当调用信号处理函数时,将信号的处理函数重置为缺省值SIG_DFL
- SA_RESTART:如果信号中断了进程的某个系统调用,则系统自动启动该系统调用
- SA_NODEFER :一般情况下, 当信号处理函数运行时,内核将阻塞该给定信号。但是如果设置SA_NODEFER标记, 那么在该信号处理函数运行时,内核将不会阻塞该信号
函数sigaction
int sigaction(int signum,const struct sigaction *act ,struct sigaction *oldact);- sigaction()会依参数signum指定的信号编号来设置该信号的处理函数。参数signum可以指定SIGKILL和SIGSTOP以外的所有信号。
sigactdemo2
#include <unistd.h>
#include <signal.h>
#include <stdio.h>
void sig_alrm( int signo )
{
/*do nothing*/
}
unsigned int mysleep(unsigned int nsecs)
{
struct sigaction newact, oldact;
unsigned int unslept;
newact.sa_handler = sig_alrm;
sigemptyset( &newact.sa_mask );
newact.sa_flags = 0;
sigaction( SIGALRM, &newact, &oldact );
alarm( nsecs );
pause();
unslept = alarm ( 0 );
sigaction( SIGALRM, &oldact, NULL );
return unslept;
}
int main( void )
{
while( 1 )
{
mysleep( 2 );
printf( "Two seconds passed\n" );
}
return 0;
}
- 每两秒输出一次
sigdemo1
#include <stdio.h>
#include <signal.h>
void f(int);
int main()
{
int i;
signal( SIGINT, f );
for(i=0; i<5; i++ ){
printf("hello\n");
sleep(2);
}
return 0;
}
void f(int signum)
{
printf("OUCH!\n");
}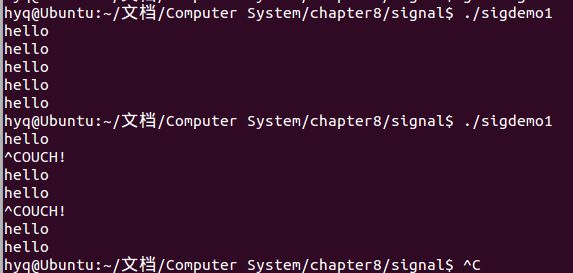
- 连续输出五个hello,每两个间隔是两秒
- 在这期间,每次输入的
Ctrl+C都被处理成打印OUCH
sigdemo2
#include <stdio.h>
#include <signal.h>
main()
{
signal( SIGINT, SIG_IGN );
printf("you can't stop me!\n");
while( 1 )
{
sleep(1);
printf("haha\n");
}
}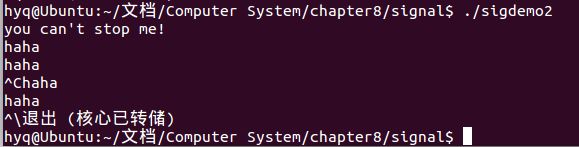
- 一直输出haha,按
Ctrl+C不能停止。 - SIG_DFL,SIG_IGN 分别表示无返回值的函数指针,指针值分别是0和1,这两个指针值逻辑上讲是实际程序中不可能出现的函数地址值。
- SIG_DFL:默认信号处理程序
- SIG_IGN:忽略信号的处理程序
sigdemo3
#include <stdio.h>
#include <string.h>
#include <signal.h>
#include <unistd.h>
#define INPUTLEN 100
int main(int argc, char *argv[])
{
void inthandler(int);
void quithandler(int);
char input[INPUTLEN];
int nchars;
signal(SIGINT, inthandler);//^C
signal(SIGQUIT, quithandler);//^\
do {
printf("\nType a message\n");
nchars = read(0, input, (INPUTLEN - 1));
if (nchars == -1)
perror("read returned an error");
else {
input[nchars] = '\0';
printf("You typed: %s", input);
}
}
while (strncmp(input, "quit", 4) != 0);
return 0;
}
void inthandler(int s)
{
printf(" Received signal %d .. waiting\n", s);
sleep(2);
printf(" Leaving inthandler \n");
}
void quithandler(int s)
{
printf(" Received signal %d .. waiting\n", s);
sleep(3);
printf(" Leaving quithandler \n");
}
多信号处理SIGX打断SIGX的情况
exec1
#include <stdio.h>
#include <unistd.h>
int main(){
char *arglist[3];
arglist[0] = "ls";
arglist[1] = "-l";
arglist[2] = 0 ;//NULL
printf("* * * About to exec ls -l\n");
execvp( "ls" , arglist );
printf("* * * ls is done. bye");
return 0;
}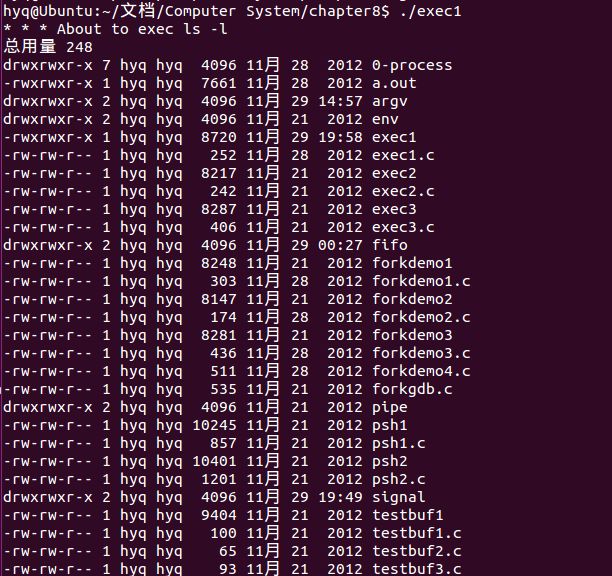
int execvp(const char file ,char const argv []);- execvp()会从PATH 环境变量所指的目录中查找符合参数file 的文件名,找到后便执行该文件,然后将第二个参数argv传给该欲执行的文件。
- 如果执行成功则函数不会返回,执行失败则直接返回-1,失败原因存于errno中。
- 在执行时exevp函数调用成功没有返回,所以没有打印“* * * ls is done. bye”
exec2
#include <stdio.h>
#include <unistd.h>
int main(){
char *arglist[3];
arglist[0] = "ls";
arglist[1] = "-l";
arglist[2] = 0 ;
printf("* * * About to exec ls -l\n");
execvp( arglist[0] , arglist );
printf("* * * ls is done. bye\n");
}- exec1传的是ls,exec2传送的是arglist[0],但运行结果是相同的。
exer3
#include <stdio.h>
#include <unistd.h>
int main(){
char *arglist[3];
char*myenv[3];
myenv[0] = "PATH=:/bin:";
myenv[1] = NULL;
arglist[0] = "ls";
arglist[1] = "-l";
arglist[2] = 0 ;
printf("* * * About to exec ls -l\n");
execlp("ls", "ls", "-l", NULL);
printf("* * * ls is done. bye\n");
}- int execlp(const char * file,const char * arg,....);
- execlp()会从PATH 环境变量所指的目录中查找符合参数file的文件名,找到后便执行该文件,然后将第二个以后的参数当做该文件的argv[0]、argv[1]……,最后一个参数必须用空指针(NULL)作结束。
- 指定了环境变量,然后依然执行了ls -l指令,成功后没有返回,所以最后一句话不会输出。运行结果同exec1。
forkdemo1
#include <stdio.h>
#include<sys/types.h>
#include<unistd.h>
int main(){
int ret_from_fork, mypid;
mypid = getpid();
printf("Before: my pid is %d\n", mypid);
ret_from_fork = fork();
sleep(1);
printf("After: my pid is %d, fork() said %d\n",
getpid(), ret_from_fork);
return 0;
}
- 这个代码先是打印进程pid,然后调用fork函数生成子进程,休眠一秒后再次打印进程id,这时父进程打印子进程pid,子进程返回0。
- 父进程通过调用fork函数创建一个新的运行子进程。
- 调用一次,返回两次。一次返回到父进程,一次返回到新创建的子进程。
forkdemo2
#include <stdio.h>
#include <unistd.h>
int main()
{
printf("before:my pid is %d\n", getpid() );
fork();
fork();
printf("aftre:my pid is %d\n", getpid() );
return 0;
}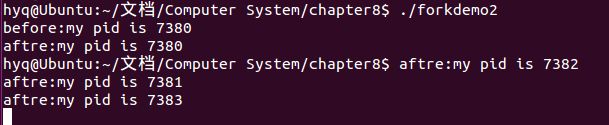
- 这个代码调用两次fork,一共产生四个子进程,所以会打印四个aftre输出。
forkdemo4
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int main(){
int fork_rv;
printf("Before: my pid is %d\n", getpid());
fork_rv = fork(); /* create new process */
if ( fork_rv == -1 ) /* check for error */
perror("fork");
else if ( fork_rv == 0 ){
printf("I am the child. my pid=%d\n", getpid());
printf("parent pid= %d, my pid=%d\n", getppid(), getpid());
exit(0);
}
else{
printf("I am the parent. my child is %d\n", fork_rv);
sleep(10);
exit(0);
}
return 0;
}
- 先打印进程pid,然后fork创建子进程,父进程返回子进程pid,所以输出parent一句,休眠十秒;子进程返回0,所以输出child与之后一句。
forkgdb
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int gi=0;
int main()
{
int li=0;
static int si=0;
int i=0;
pid_t pid = fork();
if(pid == -1){
exit(-1);
}
else if(pid == 0){
for(i=0; i<5; i++){
printf("child li:%d\n", li++);
sleep(1);
printf("child gi:%d\n", gi++);
printf("child si:%d\n", si++);
}
exit(0);
}
else{
for(i=0; i<5; i++){
printf("parent li:%d\n", li++);
printf("parent gi:%d\n", gi++);
sleep(1);
printf("parent si:%d\n", si++);
}
exit(0);
}
return 0;
}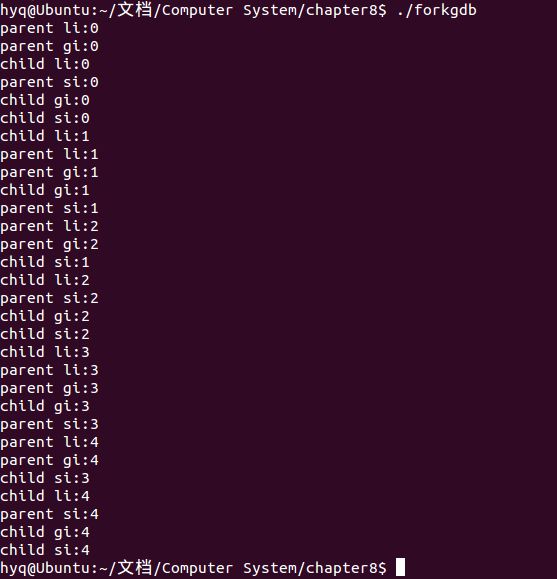
- 父进程打印是先打印两句,然后休眠一秒,然后打印一句,子进程先打印一句,然后休眠一秒,然后打印两句。并且这两个线程是并发的,所以可以看到在一个线程休眠的那一秒,另一个线程在执行,并且线程之间相互独立互不干扰。
psh1
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#define MAXARGS 20
#define ARGLEN 100
int execute( char *arglist[] )
{
execvp(arglist[0], arglist);
perror("execvp failed");
exit(1);
}
char * makestring( char *buf )
{
char *cp;
buf[strlen(buf)-1] = '\0';
cp = malloc( strlen(buf)+1 );
if ( cp == NULL ){
fprintf(stderr,"no memory\n");
exit(1);
}
strcpy(cp, buf);
return cp;
}
int main()
{
char *arglist[MAXARGS+1];
int numargs;
char argbuf[ARGLEN];
numargs = 0;
while ( numargs < MAXARGS )
{
printf("Arg[%d]? ", numargs);
if ( fgets(argbuf, ARGLEN, stdin) && *argbuf != '\n' )
arglist[numargs++] = makestring(argbuf);
else
{
if ( numargs > 0 ){
arglist[numargs]=NULL;
execute( arglist );
numargs = 0;
}
}
}
return 0;
}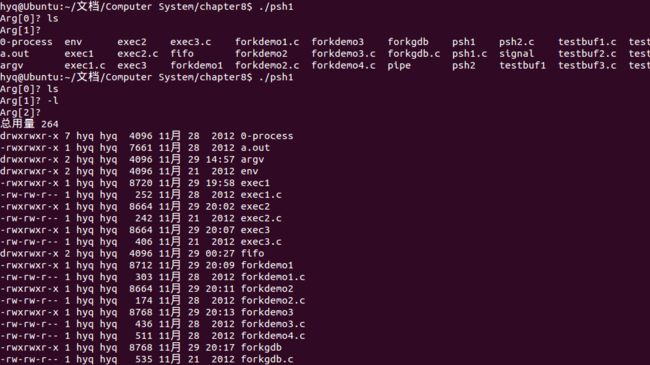
- 依次你输入要执行的指令与参数,回车表示输入结束,然后输入的每个参数对应到函数中,再调用对应的指令。
- 第一个是程序名,然后依次是程序参数。
- 一个字符串,一个字符串构造参数列表argist,最后在数组末尾加上NULL
- 将arglist[0]和arglist数组传给execvp。
- 程序正常运行,execvp命令指定的程序代码覆盖了shell程序代码,并在命令结束之后退出,shell就不能再接受新的命令。
psh2
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
#include <signal.h>
#define MAXARGS 20
#define ARGLEN 100
char *makestring( char *buf )
{
char *cp;
buf[strlen(buf)-1] = '\0';
cp = malloc( strlen(buf)+1 );
if ( cp == NULL ){
fprintf(stderr,"no memory\n");
exit(1);
}
strcpy(cp, buf);
return cp;
}
void execute( char *arglist[] )
{
int pid,exitstatus;
pid = fork();
switch( pid ){
case -1:
perror("fork failed");
exit(1);
case 0:
execvp(arglist[0], arglist);
perror("execvp failed");
exit(1);
default:
while( wait(&exitstatus) != pid )
;
printf("child exited with status %d,%d\n",
exitstatus>>8, exitstatus&0377);
}
}
int main()
{
char *arglist[MAXARGS+1];
int numargs;
char argbuf[ARGLEN];
numargs = 0;
while ( numargs < MAXARGS )
{
printf("Arg[%d]? ", numargs);
if ( fgets(argbuf, ARGLEN, stdin) && *argbuf != '\n' )
arglist[numargs++] = makestring(argbuf);
else
{
if ( numargs > 0 ){
arglist[numargs]=NULL;
execute( arglist );
numargs = 0;
}
}
}
return 0;
}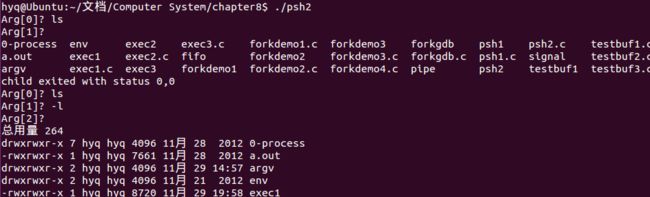
- 比起psh1多了循环判断,不退出的话就可以一直保持在输入指令,并且对于子程序存在的状态条件。
- 为了解决这个问题,程序通过调用fork来复制自己。
调用fork函数之后内核的工作过程:
分配新的内存块和内核数据结构 复制原来的进程到新的进程 向运行进程集添加新的进程 将控制返回给两个进程
testbuf1
#include <stdio.h>
#include <stdlib.h>
int main()
{
printf("hello");
fflush(stdout);
while(1);
}
- 效果是先输出hello,然后保持在循环中不结束进程。
testbuf2
#include <stdio.h>
int main()
{
printf("hello\n");
while(1);
}- fflush(stdout)的效果和换行符\n是一样的。
testbuf3
#include <stdio.h>
int main()
{
fprintf(stdout, "1234", 5);
fprintf(stderr, "abcd", 4);
}![]()
- 将内容格式化输出到标准错误、输出流中。
testpid
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
int main()
{
printf("my pid: %d \n", getpid());
printf("my parent's pid: %d \n", getppid());
return 0;
}
- 输出当前进程pid和当前进程的父进程的pid。
testpp
#include <stdio.h>
#include <stdlib.h>
int main()
{
char **pp;
pp[0] = malloc(20);
return 0;
}
- 我觉得问题在于没给pp分配空间就调用了pp[0],毕竟声明的时候只是一个指针,而指针必须要初始化。
我认为应该改成:
include
include
int main()
{
char pp;
pp = (char)malloc(20);
pp[0] = (char*)malloc(20);
return 0;
}
testsystem
#include <stdlib.h>
int main ( int argc, char *argv[] )
{
system(argv[1]);
system(argv[2]);
return EXIT_SUCCESS;
} /* ---------- end of function main ---------- */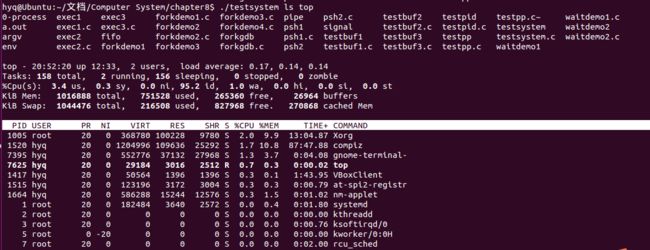
- system()——执行shell命令,也就是向dos发送一条指令。这里是后面可以跟两个参数,然后向dos发送这两个命令,分别执行。
waitdemo1
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
#define DELAY 4
void child_code(int delay)
{
printf("child %d here. will sleep for %d seconds\n", getpid(), delay);
sleep(delay);
printf("child done. about to exit\n");
exit(17);
}
void parent_code(int childpid)
{
int wait_rv=0; /* return value from wait() */
wait_rv = wait(NULL);
printf("done waiting for %d. Wait returned: %d\n",
childpid, wait_rv);
}
int main()
{
int newpid;
printf("before: mypid is %d\n", getpid());
if ( (newpid = fork()) == -1 )
perror("fork");
else if ( newpid == 0 )
child_code(DELAY);
else
parent_code(newpid);
return 0;
}
- 如果有子进程,则终止子进程,成功返回子进程pid。
waitdemo2
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
#define DELAY 10
void child_code(int delay)
{
printf("child %d here. will sleep for %d seconds\n", getpid(), delay);
sleep(delay);
printf("child done. about to exit\n");
exit(27);
}
void parent_code(int childpid)
{
int wait_rv;
int child_status;
int high_8, low_7, bit_7;
wait_rv = wait(&child_status);
printf("done waiting for %d. Wait returned: %d\n", childpid, wait_rv);
high_8 = child_status >> 8; /* 1111 1111 0000 0000 */
low_7 = child_status & 0x7F; /* 0000 0000 0111 1111 */
bit_7 = child_status & 0x80; /* 0000 0000 1000 0000 */
printf("status: exit=%d, sig=%d, core=%d\n", high_8, low_7, bit_7);
}
int main()
{
int newpid;
printf("before: mypid is %d\n", getpid());
if ( (newpid = fork()) == -1 )
perror("fork");
else if ( newpid == 0 )
child_code(DELAY);
else
parent_code(newpid);
}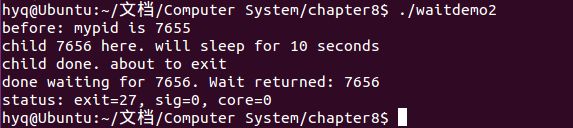
- 多了一个子进程的状态区分,把状态拆分成三块,exit,sig和core。
二、其它
管道和fifo进行进程间通信的方法部分的内容还没有写完,周一一定会写完,之前花了一部分看视频,没有留出足够的时间写博客...所以博客上就只放了些代码和运行结果...
三、参考资料
参考资料1:深入理解计算机系统(第二版)
参考资料2:Linux开发中常见段错误问题原因分析
参考资料3:指针与数组的区别和联系