【从零学习openCV】opecv操作像素
1. 存取像素值
在opencv中能够直接对cv::Mat类型的图像调用at函数读取或赋值某个像素,我们用个简单的案例来说明:
//在一张图像上增加椒盐噪声,image为输入图像。n为噪点个数
void salt(Mat &image, int n)
{
for(int k = 0;k < n;k++)
{
//随机产生白色噪点
int i = qrand()%image.cols;
int j = qrand()%image.rows;
//假设是灰度图每一个像素的存取类型为uchar,即8bit整型数
if(image.channels() == 1){
image.at<uchar>(j,i) = 255;
}
//彩色图像有三个通道,像素存取类型为cv::Vec3b,即由三个uchar组成的向量。这里用下标[i]訪问每一个通道
else{
image.at<Vec3b>(j,i)[0] = 255;
image.at<Vec3b>(j,i)[1] = 255;
image.at<Vec3b>(j,i)[2] = 255;
}
}
}效果例如以下:
能够看到有非常多白色的噪声点,像雪花一样^_^
2. 指针遍历图像
我们用颜色缩减函数来说明用行首地址的方式遍历整个图像的像素。颜色缩减就是将每一个通道的颜色数减少,假设每一个通道的强度都是有unsigned char表示。那么就有256*256*256个颜色数目,假设将每一个通道的颜色数减少为原先的1/8,那个总颜色数就是32*32*32。大概就是这个意思。
//颜色缩减函数,image为输入图像。div为缩减的倍数
void colorReduce(Mat&image, int div = 64)
{
int nl = image.rows; //图像的行数
//图像每行的像素数
int nc = image.cols * image.channels();
for(int j =0;j<nl;j++)
{
//得到第j行的首地址
uchar* data = image.ptr<uchar>(j);
//遍历每行的像素
for(int i =0;i<nc;i++)
{
data[i] = data[i]/div*div; //将每一个像素值都变为div的倍数,即将颜色数缩减了div倍
}
}
}效果例如以下:

当输入图像为连续的时候,即没有对图像行尾填补元素,这时就能够将整个图像看成是一个长为W*H的一维数组。即用第一行的行首指针就能遍历到整个图像的像素:
//颜色缩减函数。image为输入图像,div为缩减的倍数
void colorReduce(Mat&image, int div = 64)
{
int nl = image.rows; //图像的行数
//图像每行的像素数
int nc = image.cols * image.channels();
//假设图像连续
if(image.isContinuous())
{
//reshape函数用于改变矩阵维度
//图像行数为1,列数为原先的行数乘上列数
image.reshape(1,image.cols*image.rows);
}
for(int j =0;j<nl;j++)
{
//得到第j行的首地址
uchar* data = image.ptr<uchar>(j);
//遍历每行的像素
for(int i =0;i<nc;i++)
{
data[i] = data[i]/div*div; //将每一个像素值都变为div的倍数,即将颜色数缩减了div倍
}
}
}
这块内存的首地址能够通过data成员变量得到。data是一个unsigned char型的指针,所以循环能够用下面方式:
//获得图像指针
uchar *data = image.data;
//获得第j行,第i列个像素值,step代表图像的行宽(包含填补像素)
data = image.data + j*image.step + i*image.elemSize();
3. 迭代器遍历图像
事实上说到遍历。非常多人都会想到用迭代器来实现,迭代器是一种特殊的类。专门用来遍历集合中的各个元素,openCV相同为cv::Mat提供了与STL迭代器兼容的迭代器,以下我们还是用颜色缩减为例说明迭代器的使用:
//颜色缩减函数。image为输入图像。div为缩减的倍数
void colorReduce(Mat&image, int div = 64)
{
//得到初始位置的迭代器
Mat_<Vec3b>::iterator it = image.begin<Vec3b>();
//得到终止位置的迭代器
Mat_<Vec3b>::iterator itend = image.end<Vec3b>();
//遍历全部像素
for(; it != itend; ++it){
(*it)[0] = (*it)[0]/div*div;
(*it)[1] = (*it)[1]/div*div;
(*it)[2] = (*it)[2]/div*div;
}
}效果与用指针遍历的一样。
4. 以上四种存取像素方式效率对照
opencv中能够用getTickCount()来測量一段代码的执行时间,此函数返回从上次开机算起的时钟周期数,getTickFrequency()能够得到每秒内的时钟周期数,有这两个函数就能得到随意一段代码的执行时间了。
我们还是以颜色衰减函数为例,分别用以上四种方法遍历实现。看看执行时间有何不同:
//at方法
void colorReduce1(Mat&image, int div = 64)
{
int nl = image.rows; //图像的行数
//图像每行的像素数
int nc = image.cols * image.channels();
for(int j =0;j<nl-2;j++)
{
for(int i =0;i<nc-2;i++)
{
image.at<Vec3b>(j,i)[0] = image.at<Vec3b>(j,i)[0]/div*div;
image.at<Vec3b>(j,i)[1] = image.at<Vec3b>(j,i)[1]/div*div;
image.at<Vec3b>(j,i)[2] = image.at<Vec3b>(j,i)[2]/div*div;
}
}
}
//行首指针方法
void colorReduce2(Mat&image, int div = 64)
{
int nl = image.rows; //图像的行数
//图像每行的像素数
int nc = image.cols * image.channels();
for(int j =0;j<nl;j++)
{
//得到第j行的首地址
uchar* data = image.ptr<uchar>(j);
//遍历每行的像素
for(int i =0;i<nc;i++)
{
data[i] = data[i]/div*div; //将每一个像素值都变为div的倍数,即将颜色数缩减了div倍
}
}
}
//一维数组
void colorReduce3(Mat&image, int div = 64)
{
int nl = image.rows; //图像的行数
//图像每行的像素数
int nc = image.cols * image.channels();
//假设图像连续
if(image.isContinuous())
{
//reshape函数用于改变矩阵维度
//图像行数为1,列数为原先的行数乘上列数
image.reshape(1,image.cols*image.rows);
}
for(int j =0;j<nl;j++)
{
//得到第j行的首地址
uchar* data = image.ptr<uchar>(j);
//遍历每行的像素
for(int i =0;i<nc;i++)
{
data[i] = data[i]/div*div; //将每一个像素值都变为div的倍数,即将颜色数缩减了div倍
}
}
}
//迭代器方法
void colorReduce4(Mat&image, int div = 64)
{
//得到初始位置的迭代器
Mat_<Vec3b>::iterator it = image.begin<Vec3b>();
//得到终止位置的迭代器
Mat_<Vec3b>::iterator itend = image.end<Vec3b>();
//遍历全部像素
for(; it != itend; ++it){
(*it)[0] = (*it)[0]/div*div;
(*it)[1] = (*it)[1]/div*div;
(*it)[2] = (*it)[2]/div*div;
}
}
//測试4种像素遍历方式执行时间
void calrunTime(int v,Mat&image)
{
double duration;
duration = static_cast<double>(getTickCount());
for(int i = 0;i<10;i++) //执行十次取平均值
{
switch(v)
{
case 1:
colorReduce1(image);
break;
case 2:
colorReduce2(image);
break;
case 3:
colorReduce3(image);
break;
case 4:
colorReduce4(image);
break;
default:
break;
}
}
duration = static_cast<double>(getTickCount()) - duration;
duration /= getTickFrequency()/100; //执行时间,以ms为单位
qDebug()<<"duration"<<v<<":"<<duration<<"ms";
}
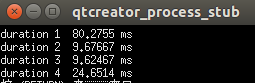
可见用at的方式读取像素效率最低,用迭代器速度也比較慢。效率最高的方式还是使用指针读取。
好了,本篇就到此结束吧。过两天继续更^_^
參考书籍
《openCV2计算机视觉编程手冊》
(转载请注明作者和出处:Shawn-HT http://blog.csdn.net/shawn_ht 未经同意请勿用于商业用途)