Pixhawk---基于NSH的Firmware开发与调试
1 相关知识了解
1.1 Nuttx系统
嵌入式实时操作系统(RTOS)。强调标准兼容和小型封装,具有从8位到32位微控制器环境的高度可扩展性。NuttX 主要遵循 Posix 和 ANSI 标准,对于在这些标准下不支持的功能,或者不适用于深度嵌入环境的功能(如 fork()),采用来自 Unix 和常见 RTOS (如 VxWorks)的额外的标准 API。
支持文件系统、设备驱动、网络、USB支持、Flash支持、图形支持等。
1.2 NSH
NuttShell和Unix终端命令类似。NSH通过串口或者USB转串口来与PX4FMU交互,因此可以使用类似超级终端的串口软件来与FMU交互,在Pixhawk开发中,建立好了开发环境后(安装了工具链等),PX4 Toolchain 已经附带了一个串口工具:TeraTerm。如果版本低了,可以单独去下载这个软件并安装。
在PX4FMU中,NSH默认是通过USB转串口和串口5(波特率为57600)来交互。可以更改默认设置。
将Pixhawk通过USB转串口连接上电脑上后,再打开TeraTerm软件。通过输入『?』或『help』指令可以查看当前NSH支持的指令已经编译好的应用。其他的一些指令跟Unix终端中用法差不多,不过一些指令的参数都没有了。
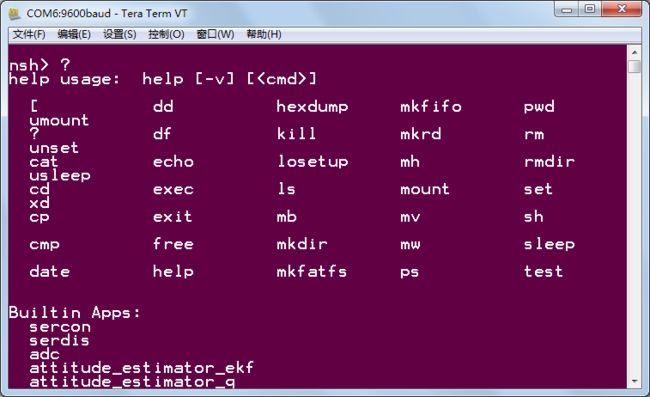
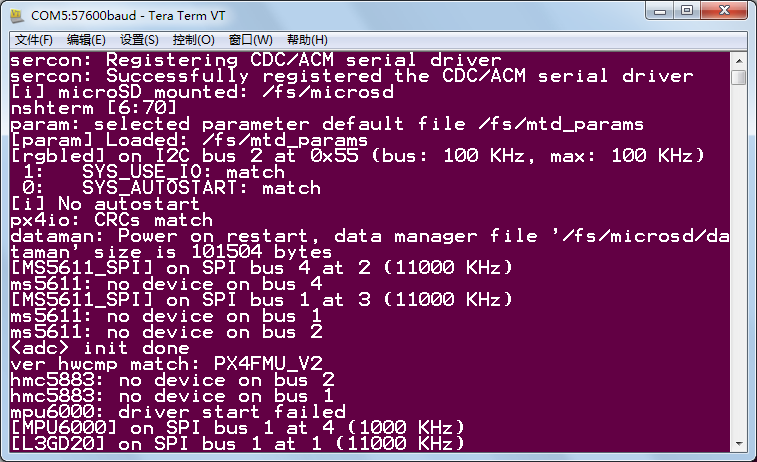
通过串口5的交互能打印PX4FMU启动时的一些信息。这个可以用来查看系统启动方面的信息。当然启动完后,还可以输入一些指令来与PX4FMU来交互。


2 编译固件和刷固件
刷固件的方式很多,可以通过地面站软件QGC或者MP都可以刷固件,可以刷稳定版的固件或者自己编译出来的自定义固件。这里通过PX4 Console来编译固件和刷固件。打开控制台,进入到固件目录:
cd /d/px4/firmware
删除所有编译的文件,包括编译的操作系统,即删除Archives文件夹和Build文件夹里面的内容一般不使用:
make distclean
编译操作系统:
make archives
一般只有当Nuttx配置改变了或者submodule(在GIT中链接外部库,比如MAVLINK或者Nuttx OS)发生了改变才会去编译操作系统,平时编译一次就好了,而且这个编译一次是需要很长的时间的,一个小时左右吧。尽管并行编译会加快速度,但是配置不好,并行编译很容易在系统运行的过程中出问题。如果你使用苹果系统或者Linux系统,这个时间也会大大降低。
删除编译的固件相关文件,即删除Build文件夹里面的内容:
make clean
编译固件,以px4fmu-v2_default版本为例:
make px4fmu-v2_defaul
编译并刷固件,编译完后紧接着刷固件:
make upload px4fmu-v2_default
在控制台上用到上面的指令就差不多了。
3 调试方式
3.1 测试小功能程序
因为在windows系统上编译一次固件需要3分钟左右吧,对于一般的功能测试程序可以通过在本机安装上VC6.0或VS或者MinGW(gcc,g++,推荐),编写测试程序编译调试。
3.2 固件测试
通过printf打印相关信息,断点标识等。这个需要编译固件,并刷固件。Pixhawk通过USB转串口线连接电脑,用TeraTerm输入指令来调试。
4 调试实例演示
前面已经说了通过串口5(波特率57600)可以查看系统启动打印的信息。通过USB转串口在NSH终端(TeraTerm)输入指令控制Nuttx中的应用或者一些命令。
可以先阅读sdlog2日志记录自动清理功能分析与实现,了解sdlog2应用是怎么运行的。sdlog2应用随着系统启动时默认启动了的,当我们修改了固件中sdlog2应用的代码时,比如简单的,我们知道sdlog2_main这个函数是在后台运行的,它是检测sdlog2应用的参数输入,比如stop,start,on,off。我们也可以自己再加一条参数检测到这个函数中:
/*添加测试代码start...*/
if(!strcmp(argv[1],"hello")){
printf("[YCM]hello world!\n");
}
/*添加测试代码end...*/int sdlog2_main(int argc, char *argv[])
{
if (argc < 2) {
sdlog2_usage("missing command");
return 1;
}
if (!strcmp(argv[1], "start")) {
if (thread_running) {
warnx("already running");
/* this is not an error */
return 0;
}
main_thread_should_exit = false;
deamon_task = px4_task_spawn_cmd("sdlog2",
SCHED_DEFAULT,
SCHED_PRIORITY_DEFAULT - 30,
3000,
sdlog2_thread_main,
(char * const *)argv);
return 0;
}
if (!strcmp(argv[1], "stop")) {
if (!thread_running) {
warnx("not started");
}
main_thread_should_exit = true;
return 0;
}
/*添加测试代码start...*/
if(!strcmp(argv[1],"hello")){
printf("[YCM]hello world!\n");
}
/*添加测试代码end...*/
if (!thread_running) {
warnx("not started\n");
return 1;
}
if (!strcmp(argv[1], "status")) {
sdlog2_status();
return 0;
}
if (!strcmp(argv[1], "on")) {
struct vehicle_command_s cmd;
cmd.command = VEHICLE_CMD_PREFLIGHT_STORAGE;
cmd.param1 = -1;
cmd.param2 = -1;
cmd.param3 = 1;
orb_advertise(ORB_ID(vehicle_command), &cmd);
return 0;
}
if (!strcmp(argv[1], "off")) {
struct vehicle_command_s cmd;
cmd.command = VEHICLE_CMD_PREFLIGHT_STORAGE;
cmd.param1 = -1;
cmd.param2 = -1;
cmd.param3 = 2;
orb_advertise(ORB_ID(vehicle_command), &cmd);
return 0;
}
sdlog2_usage("unrecognized command");
return 1;
}
编译固件并刷固件,如果你的代码有问题,那么会报错,终止编译,会有错误提示:
make upload px4fmu-v2_default
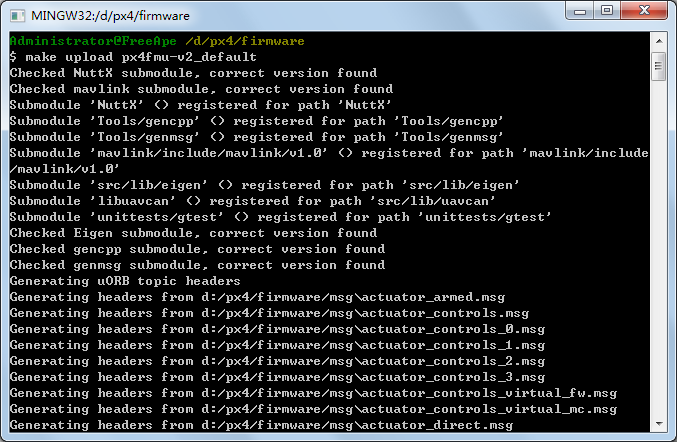
从编译过程中打印信息,我们也可以知道这个submodule中什么改变了,就需要重新编译操作系统了。编译完,刷好了固件:

再次连接TeraTerm,输入指令:
sdlog2 hello
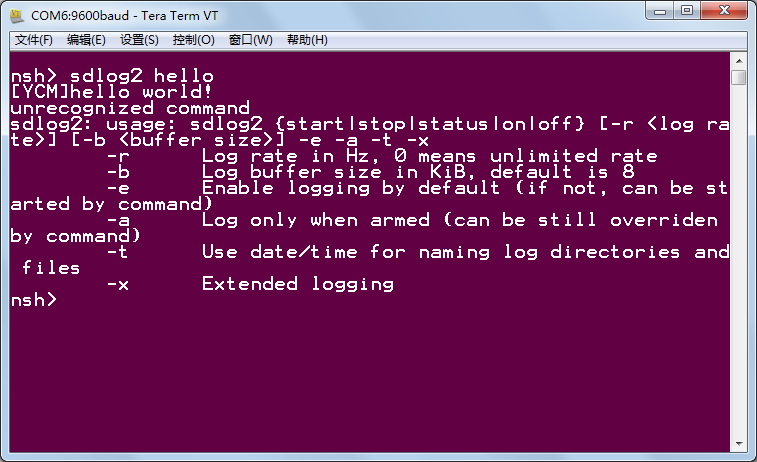
输出hello world!了。