参数维纳滤波(Parametric Wiener Filter)
摘 要:本实验主要使用维纳滤波法(又名为最小均方误差滤波)实现图像复原与重建。首先我们通过对一幅图像加入运动污损滤波和高斯噪声,然后从噪声中提取出原始图像信号。在各种估计方法中,维纳滤波是一种最基本的方法,相比起逆滤波,它更适用于从噪声中分离出有用信号的图像。
一、技术论证
1 图像复原与重建
图像复原技术的主要目的是以预先确定的目标来改善图像。图像复原试图利用退化现象的某种先验知识来复原被退化的图像。因而复原技术是面向退化模型的,并且采用相反的过程进行处理,以便恢复出原图像。
图1给出了图像退化/复原过程的模型。图像复原处理是建立在图像退化的数学模型基础上的,这个退化数学模型能够反映图像退化的原因。退化过程中可以被模型化为一个退化函数和一个加性噪声项,处理一幅输入图像![]() 产生一幅退化图像。给定
产生一幅退化图像。给定![]() 和关于退化函数
和关于退化函数![]() 的一些知识以及外加噪声项
的一些知识以及外加噪声项![]() ,图像复原的目的是获得关于原始图像的近似估计
,图像复原的目的是获得关于原始图像的近似估计![]() 。通常我们希望这一估计尽可能接近原始输入图像,并且
。通常我们希望这一估计尽可能接近原始输入图像,并且![]() 和
和![]() 的信息知道得越多,所得到的
的信息知道得越多,所得到的![]() 就会越接近
就会越接近![]() 。
。
如果系统H是一个线性、位置不变性的过程,那么在空间域中给出的退化图像可由下式给出:
![]()
其中,![]() 是退化函数的空间描述;“*”表示空间卷积。由于空间域上的卷积等同于频域上的乘积,因此,可以把退化图像的模型函数写成等价的频域下的描述:
是退化函数的空间描述;“*”表示空间卷积。由于空间域上的卷积等同于频域上的乘积,因此,可以把退化图像的模型函数写成等价的频域下的描述:
![]()
公式中各项是式1中相应项的傅里叶变换。本实验使用的退化函数为:

该函数表示图像在X轴和Y轴分别以给定的速度![]() 做匀速直线运动。实验中设定:
做匀速直线运动。实验中设定:
![]()

图1图像退化/复原过程的模型
2 高斯噪声
由于高斯噪声在空间和频域中数学上的易处理性,这种噪声(也称为正态噪声)模型经常被用于实践中。事实上,这种易处理性非常方便,使高斯模型经常用于临界情况下。高斯随机变量z的PDF由下式给出:

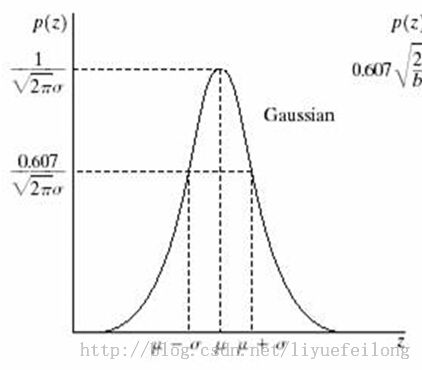
图2高斯函数的波形
3 维纳滤波
维纳滤波综合了退化函数和噪声统计特性两个方面进行复原处理,该方法是建立在认为图像和噪声是随机过程的基础上,目标是找一个未污染图像![]() 的估计值
的估计值![]() ,使它们之间的均方误差最小。误差度量由下式给出:
,使它们之间的均方误差最小。误差度量由下式给出:
其中![]() 是参数的期望值。这里假设噪声和图像不相关,其中一个或另一个有零均值,且估计的灰度级是退化图像灰度级的线性函数。在这些条件下,中误差函数的最小值在频域用下列表达式计算:
是参数的期望值。这里假设噪声和图像不相关,其中一个或另一个有零均值,且估计的灰度级是退化图像灰度级的线性函数。在这些条件下,中误差函数的最小值在频域用下列表达式计算:

这里,我们应用了这样一个事实:一个复数量与它的共轭的乘积等于该复数量幅度的平方。这个结果就是维纳滤波,是N.Wien
er[1942]首次提出的概念。由方括号里边的项所组成的滤波器通常还叫做最小均方误差滤波器,或最小二乘方误差滤波器。式中各项的意义如下:

二、实验结果讨论
本实验使用冈萨雷斯主编数字图像处理第三版中的素材Fig5.07(a).jpg进行+45度方向,T=1的污损滤波,并对污损图像进行高斯噪声加噪处理。其次,验证维纳滤波法的有效性。从实验结果可以看出维纳滤波对于噪声的复原效果是很好的。
编写函数gaussian_noise(ima,a,b)产生高斯噪声,其中ima为输入图像,a,b分别是高斯噪声的均值和方差,函数中主要调用了函数randn(),该函数的效果是产生正态分布的随机数或矩阵的函数。要产生一个随机分布的指定均值和方差的矩阵,只需执行以下公式:
![]()
式中(m,n)为图像的尺寸。为了验证函数效果,图3给出均值为0,方差分别为20,200,1000的加性噪声图像。本实验过程中要求生成均值为0、方差为10的高斯噪声。
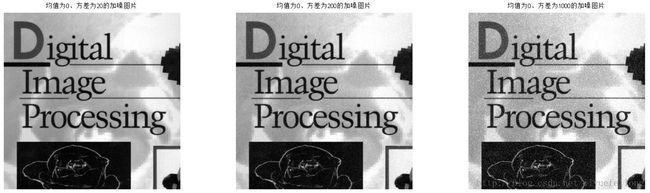
图3均值为0,方差分别为20,200,1000的加性高斯噪声图像
编写函数motion(T,a,b)实现图像模糊化,其中使用的核心公式为:

使用函数进行+45度方向且T=1 的污损滤波,对比MATLAB自带函数的效果,如图4所示,有巨大差异,但图像确实在x和y轴都有同幅度的位移,事实证明只有核心公式还无法做到示例的输出效果。

图4两种函数的运动模糊输出图像
编写函数实现对运动模糊且存在噪声的图像的重建和复原,其中使用的退化函数为:

图5和图6分别给出了维纳滤波恢复结果,结果显示维纳滤波能有效重建院图像。而对于图6这种噪声污染严重的图像,使用该滤波方法也能得到有效改善。

图5 图像经过运动模糊、加噪处理(0均值,10方差)和维纳滤波后的效果对比
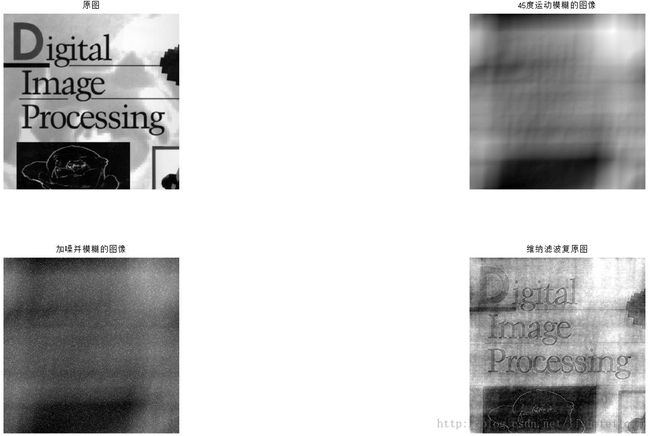
图6图像经过运动模糊、加噪处理(0均值,100方差)和维纳滤波后的效果对比
以下给出主要部分的MATLAB代码: