OpenCV-Python教程(9、使用霍夫变换检测直线)
相比C++而言,Python适合做原型。本系列的文章介绍如何在Python中用OpenCV图形库,以及与C++调用相应OpenCV函数的不同之处。这篇文章介绍在Python中使用OpenCV的霍夫变换检测直线。
提示:
- 转载请详细注明原作者及出处,谢谢!
- 本文介绍在OpenCV-Python中使用霍夫变换检测直线的方法。
- 本文不介详细的理论知识,读者可从其他资料中获取相应的背景知识。笔者推荐清华大学出版社的《图像处理与计算机视觉算法及应用(第2版) 》。
霍夫变换
Hough变换是经典的检测直线的算法。其最初用来检测图像中的直线,同时也可以将其扩展,以用来检测图像中简单的结构。
OpenCV提供了两种用于直线检测的Hough变换形式。其中基本的版本是cv2.HoughLines。其输入一幅含有点集的二值图(由非0像素表示),其中一些点互相联系组成直线。通常这是通过如Canny算子获得的一幅边缘图像。cv2.HoughLines函数输出的是[float, float]形式的ndarray,其中每个值表示检测到的线(ρ , θ)中浮点点值的参数。下面的例子首先使用Canny算子获得图像边缘,然后使用Hough变换检测直线。其中HoughLines函数的参数3和4对应直线搜索的步长。在本例中,函数将通过步长为1的半径和步长为π/180的角来搜索所有可能的直线。最后一个参数是经过某一点曲线的数量的阈值,超过这个阈值,就表示这个交点所代表的参数对(rho, theta)在原图像中为一条直线。具体理论可参考这篇文章。
#coding=utf-8
import cv2
import numpy as np
img = cv2.imread("/home/sunny/workspace/images/road.jpg", 0)
img = cv2.GaussianBlur(img,(3,3),0)
edges = cv2.Canny(img, 50, 150, apertureSize = 3)
lines = cv2.HoughLines(edges,1,np.pi/180,118) #这里对最后一个参数使用了经验型的值
result = img.copy()
for line in lines[0]:
rho = line[0] #第一个元素是距离rho
theta= line[1] #第二个元素是角度theta
print rho
print theta
if (theta < (np.pi/4. )) or (theta > (3.*np.pi/4.0)): #垂直直线
#该直线与第一行的交点
pt1 = (int(rho/np.cos(theta)),0)
#该直线与最后一行的焦点
pt2 = (int((rho-result.shape[0]*np.sin(theta))/np.cos(theta)),result.shape[0])
#绘制一条白线
cv2.line( result, pt1, pt2, (255))
else: #水平直线
# 该直线与第一列的交点
pt1 = (0,int(rho/np.sin(theta)))
#该直线与最后一列的交点
pt2 = (result.shape[1], int((rho-result.shape[1]*np.cos(theta))/np.sin(theta)))
#绘制一条直线
cv2.line(result, pt1, pt2, (255), 1)
cv2.imshow('Canny', edges )
cv2.imshow('Result', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
结果如下:

注意:
在C++中,HoughLines函数得到的结果是一个向量lines,其中的元素是由两个元素组成的子向量(rho, theta),所以lines的访问方式类似二维数组。因此,可以以类似:
std::vector<cv::Vec2f>::const_iterator it= lines.begin(); float rho= (*it)[0]; float theta= (*it)[1];
这样的方式访问rho和theta。
而在Python中,返回的是一个三维的np.ndarray!。可通过检验HoughLines返回的lines的ndim属性得到。如:
lines = cv2.HoughLines(edges,1,np.pi/180,118) print lines.ndim #将得到3至于为什么是三维的,这和NumPy中ndarray的属性有关(关于NumPy的相关内容,请移步至 NumPy简明教程),如果将HoughLines检测到的的结果输出,就一目了然了:
#上面例子中检测到的lines的数据 3 #lines.ndim属性 (1, 5, 2) #lines.shape属性 #lines[0] [[ 4.20000000e+01 2.14675498e+00] [ 4.50000000e+01 2.14675498e+00] [ 3.50000000e+01 2.16420817e+00] [ 1.49000000e+02 1.60570288e+00] [ 2.24000000e+02 1.74532920e-01]] =============== #lines本身 [[[ 4.20000000e+01 2.14675498e+00] [ 4.50000000e+01 2.14675498e+00] [ 3.50000000e+01 2.16420817e+00] [ 1.49000000e+02 1.60570288e+00] [ 2.24000000e+02 1.74532920e-01]]]
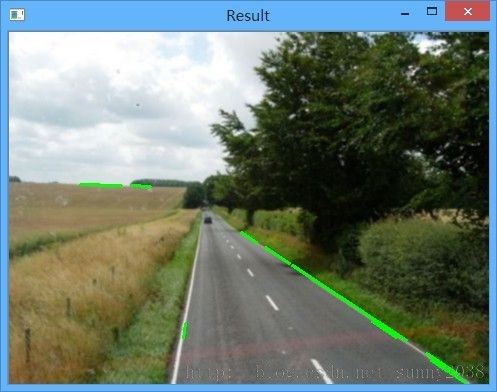
概率霍夫变换
观察前面的例子得到的结果图片,其中Hough变换看起来就像在图像中查找对齐的边界像素点集合。但这样会在一些情况下导致虚假检测,如像素偶然对齐或多条直线穿过同样的对齐像素造成的多重检测。
要避免这样的问题,并检测图像中分段的直线(而不是贯穿整个图像的直线),就诞生了Hough变化的改进版,即概率Hough变换(Probabilistic Hough)。在OpenCV中用函数cv::HoughLinesP 实现。如下:
#coding=utf-8
import cv2
import numpy as np
img = cv2.imread("/home/sunny/workspace/images/road.jpg")
img = cv2.GaussianBlur(img,(3,3),0)
edges = cv2.Canny(img, 50, 150, apertureSize = 3)
lines = cv2.HoughLines(edges,1,np.pi/180,118)
result = img.copy()
#经验参数
minLineLength = 200
maxLineGap = 15
lines = cv2.HoughLinesP(edges,1,np.pi/180,80,minLineLength,maxLineGap)
for x1,y1,x2,y2 in lines[0]:
cv2.line(img,(x1,y1),(x2,y2),(0,255,0),2)
cv2.imshow('Result', img)
cv2.waitKey(0)
cv2.destroyAllWindows()结果如下:
未完待续。。。
参考资料:
1、《Opencv2 Computer Vision Application Programming Cookbook》
2、《OpenCV References Manule》