OpenCV图像处理篇之Hough变换
图像空间到参数空间的转换
对于图像中共线的点集{(x0,y0), (x1,y1), ...}都经过直线y=kx+b,先在我们换一个说法,“斜率为k,截距为b的直线y=kx+b包含了所有在该直线上的点”。一种强调的是图像中的点集,另一种强调的是直线的参数k和b,通过直线的点集去描述这条直线明显没有直接通过k,b两个参数去描述那样直接方便。而Hough变换就是将我们“点共线”的思维转化到参数空间{k,b}进行描述,图像空间中所有经过y=kx+b的点经过Hough变换后在参数空间都会相交于点(k,b),这样,通过Hough变换,就可以将图像空间中直线的检测转化为参数空间中对点的检测。我们不妨将y=kx+b进行一下变形:
![]()
这就是Hough变换将图像空间坐标(x,y)转化为参数空间(k,b)的Hough变换式。
Hough变换的步骤(执行过程):
在参数空间中建立一个二维(分别对应k,b)计数器,实际就是二维数组kbcnt,k维度为图像中直线斜率可能范围,b维度为图像中截距可能范围;数组中所有值都初始化为0;
扫描图像空间中的所有点(xi,yi),Hough变换式进行图像空间到参数空间的变换(ki,bi),计数kbcnt(ki,bi)++
设定阈值thr(图像中有多少个点共线才认为存在直线),kbcnt(ki,bi)>thr的ki,bi组成图像中的直线y=ki*x+bi
然而,上面的检测直线的方案貌似还有些问题:如果图像中存在竖直的直线呢,那kbcnt的k维度岂不是要无穷大!因此,才有了另一种参数空间的方案:利用极坐标参数而非“斜率-截距式”描述直线。
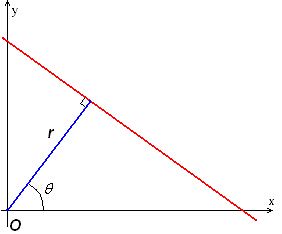
极坐标中的直线表示
极坐标中的直线方程为
![]()
将其改写成Hough变换式,即自变量(x,y)到参数变量(r,theta)的映射:
![]()
使用极坐标参数空间,Hough变换的步骤不变,只不过将kbcnt替换成rthcnt,r范围是图像对角线的长度,th范围是0~2*pi。因为图像是离散的,所以r和th都有一个步进值dr和dth。
Hough变换除了检测直线,还可用来检测任何能用数学表达式表示的形状,如最常见的圆、椭圆,基本原理都是将图像空间的像素转变到参数空间,然后在参数空间中对共线/圆/椭圆的点进行统计,最后通过阈值判决是否是符合要求的形状。
http://en.wikipedia.org/wiki/Hough_transform 上对Hough变换的内容有更多的描述。
OpenCV中的Hough变换
/*
* FileName : hough.cpp
* Author : xiahouzuoxin @163.com
* Version : v1.0
* Date : Wed 26 Nov 2014 09:52:45 PM CST
* Brief :
*
* Copyright (C) MICL,USTB
*/
#include "cv.h"
#include "highgui.h"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
using namespace std;
int main(int argc, char *argv[])
{
if (argc < 2) {
cout<<"Usage: ./hough [image file name]"<<endl;
return -1;
}
Mat src = imread(argv[1], CV_LOAD_IMAGE_COLOR);
if (!src.data) {
cout<<"Read image error"<<endl;
return -1;
}
namedWindow("Source", CV_WINDOW_AUTOSIZE);
imshow("Source", src);
Mat img;
cvtColor(src, img, CV_RGB2GRAY);
GaussianBlur(img, img, Size(3,3), 0, 0);
Canny(img, img, 100, 200, 3);
namedWindow("Canny", CV_WINDOW_AUTOSIZE);
imshow("Canny", img);
vector<Vec2f> lines;
HoughLines(img, lines, 1, CV_PI/360, 200); // 返回直线坐标对
for (size_t i=0; i<lines.size(); i++) {
float rho = lines[i][0];
float theta = lines[i][1];
Point pt1,pt2;
double a=cos(theta);
double b=sin(theta);
double x0 = rho*a;
double y0 = rho*b;
pt1.x = cvRound(x0+1000*(-b));
pt1.y = cvRound(y0+1000*a);
pt2.x = cvRound(x0-1000*(-b));
pt2.y = cvRound(y0-1000*a);
line(src, pt1, pt2, Scalar(0,0,255), 3, CV_AA);
}
namedWindow("Hough", CV_WINDOW_AUTOSIZE);
imshow("Hough", src);
waitKey();
return 0;
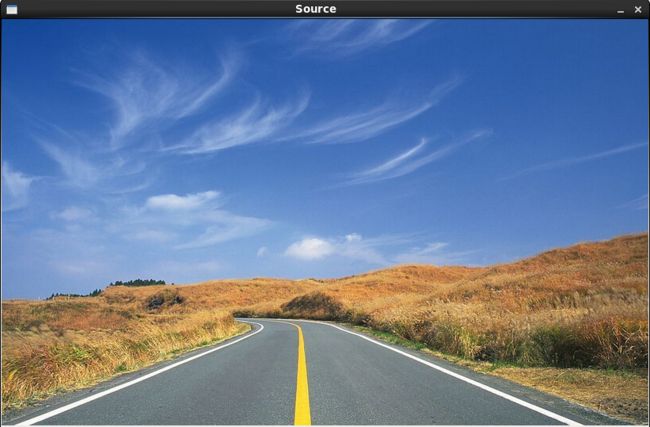
}在做Hough变换之前,一般都要先使用LOG或Canny先检测边缘,再对边缘图像进行Hough变换操作,上面程序使用Canny算子检测边缘,Canny算子Canny(img, img, 100, 200, 3);的两个阈值100,100选择很重要,间接影响Hough检测的结果,同时HoughLines中的阈值参数也应该细调。用上面程序对道路直线进行检测结果如下,
道路图片1

Canny算子边缘检测结果
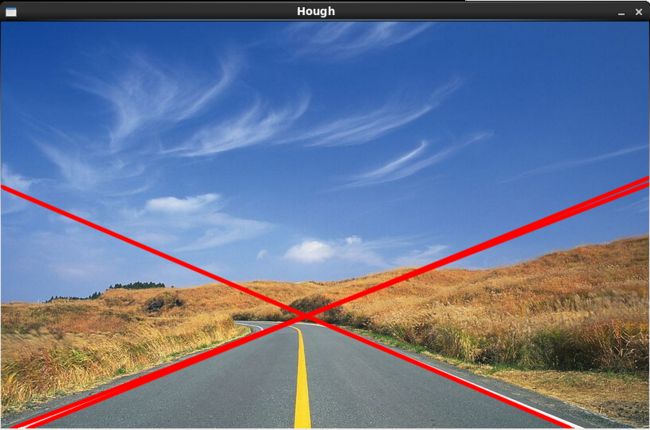
Hough直线检测结果
道路图片2

Canny算子边缘检测结果
Hough直线检测结果
Hough变换源码分析
Hough变换的源代码在modules/imgproc/src/hough.cpp中,提供了3种Hough变换源码:直线检测、概率Hough变换检测直线、圆检测,如果要实现其它有解析方程的图形的检测,则要自己动手写了。
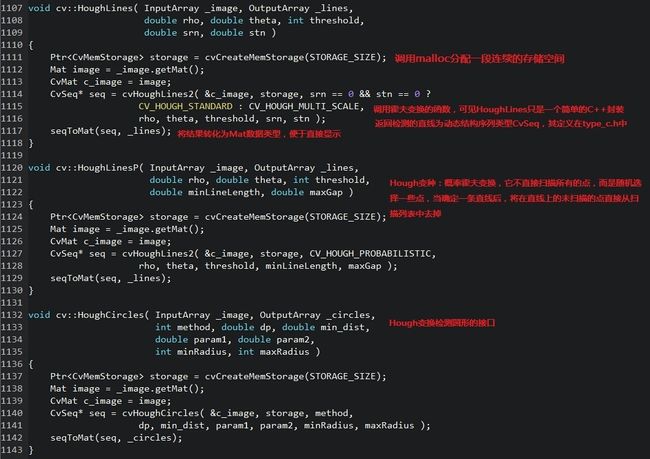
Hough变换调用接口函数解释
先看Hough检测直线的代码,cvHoughLines2也只不过是个对不同Hough方法的封装,下面是该函数中的部分代码,选择不同的Hough变换方法,
switch( method )
{
case CV_HOUGH_STANDARD:
icvHoughLinesStandard( img, (float)rho,
(float)theta, threshold, lines, linesMax ); // 标准Hough变换
break;
case CV_HOUGH_MULTI_SCALE:
icvHoughLinesSDiv( img, (float)rho, (float)theta,
threshold, iparam1, iparam2, lines, linesMax ); // 多尺度Hough变换
break;
case CV_HOUGH_PROBABILISTIC:
icvHoughLinesProbabalistic( img, (float)rho, (float)theta,
threshold, iparam1, iparam2, lines, linesMax ); // 概率Hough变换
break;
default:
CV_Error( CV_StsBadArg, "Unrecognized method id" );
}不妨详细看看标准Hough变换的实现代码,
/* 这段注释解释了函数各个参数的作用
Here image is an input raster;
step is it's step; size characterizes it's ROI;
rho and theta are discretization steps (in pixels and radians correspondingly).
threshold is the minimum number of pixels in the feature for it
to be a candidate for line. lines is the output
array of (rho, theta) pairs. linesMax is the buffer size (number of pairs).
Functions return the actual number of found lines.
*/
static void
icvHoughLinesStandard( const CvMat* img, float rho, float theta,
int threshold, CvSeq *lines, int linesMax )
{
cv::AutoBuffer<int> _accum, _sort_buf; // _accum:计数用数组,_sort_buf,排序用数组
cv::AutoBuffer<float> _tabSin, _tabCos; // 提前计算sin与cos值,避免重复计算带来的计算性能下降
const uchar* image;
int step, width, height;
int numangle, numrho;
int total = 0;
float ang;
int r, n;
int i, j;
float irho = 1 / rho; // rho指像素精度,常取1,因此irho常为1
double scale;
CV_Assert( CV_IS_MAT(img) && CV_MAT_TYPE(img->type) == CV_8UC1 );
image = img->data.ptr;
step = img->step;
width = img->cols;
height = img->rows;
numangle = cvRound(CV_PI / theta); // 根据th精度计算th维度的长度
numrho = cvRound(((width + height) * 2 + 1) / rho); // 根据r精度计算r维度的长度
_accum.allocate((numangle+2) * (numrho+2));
_sort_buf.allocate(numangle * numrho);
_tabSin.allocate(numangle);
_tabCos.allocate(numangle);
int *accum = _accum, *sort_buf = _sort_buf;
float *tabSin = _tabSin, *tabCos = _tabCos;
memset( accum, 0, sizeof(accum[0]) * (numangle+2) * (numrho+2) );
for( ang = 0, n = 0; n < numangle; ang += theta, n++ ) // 计算三角函数表,避免重复计算
{
tabSin[n] = (float)(sin(ang) * irho);
tabCos[n] = (float)(cos(ang) * irho);
}
// stage 1. fill accumulator
for( i = 0; i < height; i++ )
for( j = 0; j < width; j++ )
{
if( image[i * step + j] != 0 )
for( n = 0; n < numangle; n++ )
{
r = cvRound( j * tabCos[n] + i * tabSin[n] ); // Hough极坐标变换式
r += (numrho - 1) / 2;
accum[(n+1) * (numrho+2) + r+1]++; // 计数器统计
}
}
// stage 2. find local maximums
for( r = 0; r < numrho; r++ )
for( n = 0; n < numangle; n++ )
{
int base = (n+1) * (numrho+2) + r+1;
if( accum[base] > threshold && // 大于阈值,且是局部极大值
accum[base] > accum[base - 1] && accum[base] >= accum[base + 1] &&
accum[base] > accum[base - numrho - 2] && accum[base] >= accum[base + numrho + 2] )
sort_buf[total++] = base;
}
// stage 3. sort the detected lines by accumulator value
icvHoughSortDescent32s( sort_buf, total, accum );
// stage 4. store the first min(total,linesMax) lines to the output buffer
linesMax = MIN(linesMax, total); // linesMax是输入参数,表示最多输出多少个直线参数
scale = 1./(numrho+2);
for( i = 0; i < linesMax; i++ )
{
CvLinePolar line; // 输出结构,就是(r,theta)
int idx = sort_buf[i];
int n = cvFloor(idx*scale) - 1;
int r = idx - (n+1)*(numrho+2) - 1;
line.rho = (r - (numrho - 1)*0.5f) * rho;
line.angle = n * theta;
cvSeqPush( lines, &line ); // 确定的直线入队列输出
}
}Hough.cpp中对输出结构的定义为:
typedef struct CvLinePolar
{
float rho;
float angle;
} CvLinePolar;其它的Hough变换采用类似的方式逐层可以分析其源码,不妨自己试试?