串行通信_SPI通讯协议
SPI是英文Serial Peripheral Interface的缩写,中文意思是串行外围设备接口,SPI是Motorola公司推出的一种同步串行通讯方式,是一种三线同步总线,因其硬件功能很强,与SPI有关的软件就相当简单,使CPU有更多的时间处理其他事务。
SPI:高速同步串行口。3~4线接口,收发独立、可同步进行.SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola首先在其MC68HCXX系列处理器上定义的。SPI接口主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如AT91RM9200.
SPI总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT或INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)。
(1)SDO – 主设备数据输出,从设备数据输入
(2)SDI – 主设备数据输入,从设备数据输出
(3)SCLK – 时钟信号,由主设备产生
(4)CS – 从设备使能信号,由主设备控制
其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。这就允许在同一总线上连接多个SPI设备成为可能。
接下来就负责通讯的3根线了。通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。这就是SCK时钟线存在的原因,由SCK提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。数据输出通过 SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。完成一位数据传输,输入也使用同样原理。这样,在至少8次时钟信号的改变(上沿和下沿为一次),就可以完成8位数据的传输。
要注意的是,SCK信号线只由主设备控制,从设备不能控制信号线。同样,在一个基于SPI的设备中,至少有一个主控设备。这样传输的特点:这样的传输方式有一个优点,与普通的串行通讯不同,普通的串行通讯一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。也就是说,主设备通过对SCK时钟线的控制可以完成对通讯的控制。SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。不同的SPI设备的实现方式不尽相同,主要是数据改变和采集的时间不同,在时钟信号上沿或下沿采集有不同定义,具体请参考相关器件的文档。
在点对点的通信中,SPI接口不需要进行寻址操作,且为全双工通信,显得简单高效。在多个从设备的系统中,每个从设备需要独立的使能信号,硬件上比I2C系统要稍微复杂一些。 最后,SPI接口的一个缺点:没有指定的流控制,没有应答机制确认是否接收到数据。
AT91RM9200的SPI接口主要由4个引脚构成:SPICLK、MOSI、MISO及 /SS,其中SPICLK是整个SPI总线的公用时钟,MOSI、MISO作为主机,从机的输入输出的标志,MOSI是主机的输出,从机的输入,MISO 是主机的输入,从机的输出。/SS是从机的标志管脚,在互相通信的两个SPI总线的器件,/SS管脚的电平低的是从机,相反/SS管脚的电平高的是主机。在一个SPI通信系统中,必须有主机。SPI总线可以配置成单主单从,单主多从,互为主从。
SPI的片选可以扩充选择16个外设,这时PCS输出=NPCS,说NPCS0~3接4-16译码器,这个译码器是需要外接4-16译码器,译码器的输入为NPCS0~3,输出用于16个外设的选择。同步外设接口(SPI)是由摩托罗拉公司开发的全双工同步串行总线,该总线大量用在与EEPROM、ADC、FRAM和显示驱动器之类的慢速外设器件通信。
SPI(Serial Peripheral Interface)是一种串行同步通讯协议,由一个主设备和一个或多个从设备组成,主设备启动一个与从设备的同步通讯,从而完成数据的交换。SPI 接口由SDI(串行数据输入),SDO(串行数据输出),SCK(串行移位时钟),CS(从使能信号)四种信号构成,CS 决定了唯一的与主设备通信的从设备,如没有CS 信号,则只能存在一个从设备,主设备通过产生移位时钟来发起通讯。通讯时,数据由SDO 输出,SDI 输入,数据在时钟的上升或下降沿由SDO 输出,在紧接着的下降或上升沿由SDI 读入,这样经过8/16 次时钟的改变,完成8/16 位数据的传输。
SPI通信
该总线通信基于主-从配置。它有以下4个信号:
MOSI:主出/从入
MISO:主入/从出
SCK:串行时钟
SS:从属选择
芯片上“从属选择”(slave-select)的引脚数决定了可连到总线上的器件数量。
在SPI传输中,数据是同步进行发送和接收的。数据传输的时钟基于来自主处理器的时钟脉冲,摩托罗拉没有定义任何通用SPI的时钟规范。然而,最常用的时钟设置基于时钟极性(CPOL)和时钟相位(CPHA)两个参数,CPOL定义SPI串行时钟的活动状态,而CPHA定义相对于SO-数据位的时钟相位。 CPOL和CPHA的设置决定了数据取样的时钟沿。
数据方向和通信速度
SPI传输串行数据时首先传输最高位。波特率可以高达5Mbps,具体速度大小取决于SPI硬件。例如,Xicor公司的SPI串行器件传输速度能达到5MHz。
SPI总线接口及时序
SPI总线包括1根串行同步时钟信号线以及2根数据线。
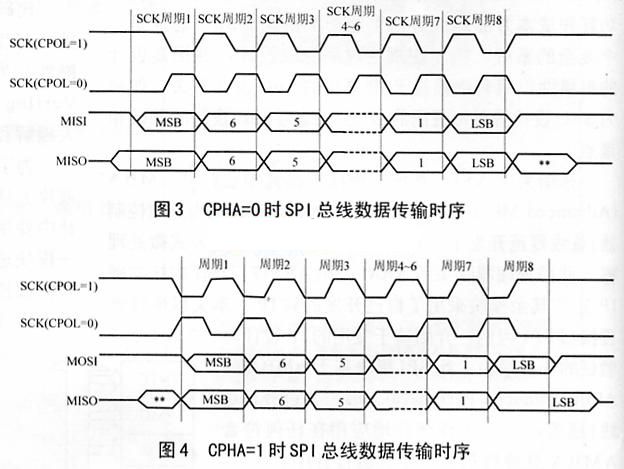
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果 CPOL="0",串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。SPI主模块和与之通信的外设音时钟相位和极性应该一致。SPI接口时序如图3、图4所示。
SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
假设下面的8位寄存器装的是待发送的数据10101010,上升沿发送、下降沿接收、高位先发送。
那么第一个上升沿来的时候数据将会是sdo=1;寄存器=0101010x。下降沿到来的时候,sdi上的电平将所存到寄存器中去,那么这时寄存器=0101010sdi,这样在8个时钟脉冲以后,两个寄存器的内容互相交换一次。这样就完成里一个spi时序。
例子:
假设主机和从机初始化就绪:并且主机的sbuff=0xaa,从机的sbuff=0x55,下面将分步对spi的8个时钟周期的数据情况演示一遍:假设上升沿发送数据
下面是SPI读写协议的移位过程,每个CLK都是按照四种模式要求的边沿触发方式,来移位的。下表就是每一个CLK,主机SBUFF传输数据的移位过程。
| 脉冲 | 主机sbuff | 从机sbuff | sdi | sdo |
| 0 | 10101010 | 01010101 | 0 | 0 |
| 1上 | 0101010x | 1010101x | 0 | 1 |
| 1下 | 01010100 | 10101011 | 0 | 1 |
| 2上 | 1010100x | 0101011x | 1 | 0 |
| 2下 | 10101001 | 01010110 | 1 | 0 |
| 3上 | 0101001x | 1010110x | 0 | 1 |
| 3下 | 01010010 | 10101101 | 0 | 1 |
| 4上 | 1010010x | 0101101x | 1 | 0 |
| 4下 | 10100101 | 01011010 | 1 | 0 |
| 5上 | 0100101x | 1011010x | 0 | 1 |
| 5下 | 01001010 | 10110101 | 0 | 1 |
| 6上 | 1001010x | 0110101x | 1 | 0 |
| 6下 | 10010101 | 01101010 | 1 | 0 |
| 7上 | 0010101x | 1101010x | 0 | 1 |
| 7下 | 00101010 | 11010101 | 0 | 1 |
| 8上 | 0101010x | 1010101x | 1 | 0 |
| 8下 | 01010101 | 10101010 | 1 | 0 |
这样就完成了两个寄存器8位的交换,上面的上表示上升沿、下表示下降沿,sdi、sdo相对于主机而言的。其中ss引脚作为主机的时候,从机可以把它拉底被动选为从机,作为从机的是时候,可以作为片选脚用。根据以上分析,一个完整的传送周期是16位,即两个字节,因为,首先主机要发送命令过去,然后从机根据主机的名准备数据,主机在下一个8位时钟周期才把数据读回来
SPI 总线是Motorola公司推出的三线同步接口,同步串行3线方式进行通信:一条时钟线SCK,一条数据输入线MOSI,一条数据输出线MISO;用于 CPU与各种外围器件进行全双工、同步串行通讯。SPI主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。图3示出SPI总线工作的四种方式,其中使用的最为广泛的是SPI0和SPI3方式(实线表示):
图2 SPI总线四种工作方式
SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果 CPOL="0",串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。SPI主模块和与之通信的外设音时钟相位和极性应该一致。SPI接口时序如图3、图4所示。
SPI总线协议,串行SPI E2PROM的读写介绍如下:
MOTOROLA公司的SPI总线的基本信号线为3根传输线,即SI、SO、SCK。传输的速率由时钟信号SCK决定,SI为数据输入、SO为数据输出。采用SPI总线的系统如图8-27所示,它包含了一个主片和多个从片,主片通过发出片选信号-CS来控制对哪个从片进行通信,当某个从片的-CS信号有效时,能通过SI接收指令、数据,并通过SO发回数据。而未被选中的从片的SO端处于高阻状态。
图8-27 SPI总线的系统
主片在访问某一从片时,必须使该从片的片选信号有效;主片在SCK信号的同步下,通过SI线发出指令、地址信息;如需将数据输出,则接着写指令,由SCK同步在SI线上发出数据;如需读回数据,则接着读指令,由主片发出SCK,从片根据SCK的节拍通过SO发回数据。
因而对具有SPI接口的从片器件来讲,SCK、SI是输入信号,SO是输出信号。SCK用于主片和从片通信的同步。SI用于将信息传输到器件,输入的信息包括指令、地址和数据,指令、地址和数据的变化在SCK的低电平期间进行,并由SCK信号的上升沿锁存。SO 用于将信息从器件传出,传出的信息包括状态和数据,信息在SCK信号的下降沿移出。
Microchip公司的25XX系列的串行E2PROM采用了SPI总线,该系列器件的性能如表8-2所示。
表8-2 Microchip公司的25XX系列的串行E2PROM
| 型号 |
25XX040 |
25XX080 |
25XX160 |
25XX320 |
| 容量 |
4K (512 X 8bit) |
8K (1024 X 8bit) |
16K (4096 X 8bit) |
32K (4096 X 8bit) |
| 地址信号 |
A0~A8 |
A0~A9 |
A0~A10 |
A0~A11 |
以25XX320为例,该器件是4K字节的E2PROM,结构如图8-28所示,接口信号为SCK、SI和SO,此外还具有-CS、-WP、-HOLD信号线。其中 -CS为器件选中信号,当此信号为低电平时器件被选中,高电平时器件处于等待状态。
图8-28 25XX320的结构
与并行接口电路不同的是,在并行接口电路中对器件进行操作的控制信号,在串行接口电路中只能用指令实现,25XX320的操作指令有数据读指令、写操作的允许和禁止指令、写数据指令和状态寄存器的读写指令。在器件的内部有一个8位的指令寄存器,在SCK的上升沿,通过SI信号线,指令输入到上述寄存器并被执行。
表8-3 25系列串行存储器的指令
| 指令名称 |
指令格式 |
描述 |
| READ |
00000011 |
从选定的地址开始读存储器数据 |
| WRITE |
00000010 |
从选定的地址开始写存储器数据 |
| WRDI |
00000100 |
禁止写操作 |
| WREN |
00000110 |
允许写操作 |
| RDSR |
00000101 |
读状态寄存器 |
| WRSR |
00000001 |
写状态寄存器 |
器件的读操作时序如图8-29所示。当-CS信号有效时,在SCK信号的同步下,8位的读指令送入器件,接着送入16位地址(由于25XX320只使用地址信号 A0~A11,地址的高4位无效)。在读指令和地址发出后,SCK继续发出时钟信号,此时存储在该地址的数据由SCK控制从SO引脚移出。在每个数据移出后,内部的地址指针自动加1,如继续对器件发送SCK信号,可读出下一个数据。当地址指针计到0FFFH之后,将回到0000H。读操作的结束由-CS信号变高实现。
图8-29 25系列串行存储器的读时序
25XX系列的串行EEPROM的写操作通过写允许及禁止指令控制,写操作必须在器件处于写允许状态时进行。
写允许及禁止指令均为8位的指令,指令的操作过程为:将-CS信号置为低电平,在SCK信号的作用下,通过SI引脚输入上述指令,在8位的指令送入器件之后,将-CS信号置为高电平,使器件锁存于写允许或写禁止状态。如在输入写允许指令后未将-CS信号置为高电平,则写允许状态未锁存,此时如直接进行写操作,数据将不能写入存储器。在上电、写禁止指令、写状态寄存器指令、写数据指令执行之后,器件的写允许状态将被复位,即处于写禁止状态。
写操作通常在写允许指令之后进行,其时序如图8-30所示。在写允许状态锁存后,将-CS变高;再将-CS变低,在SCK的同步下输入写操作指令并送入16位地址,紧接着发送需写入的数据,写入的数据一次最多可达32个,但必须保证在同一页内。一页数据的地址从XXXX XXXX XXX0 0000 开始,到XXXX XXXX XXX1 1111结束,当内部的地址指针计数器达到XXXX XXXX XXX1 1111后,继续发送时钟信号将使地址计数器回复到该页的第一个地址,即XXXX XXXX XXX0 0000H。
图8-30 25系列串行存储器的写时序
为了使数据有效写入,-CS信号只能在写入数据的最后一个字节的最低位写入后变高。如-CS信号在其他时间变高,将无法保证数据的完整写入。在写操作的过程中,能通过读状态指令将状态寄存器的内容读回,当写操作完成后,写允许锁存状态将被复位。
二,.SPI功能模块的设计
根据功能定义及SPI的工作原理,将整个IP Core分为8个子模块:uC接口模块、时钟分频模块、发送数据FIFO模块、接收数据FIFO模块、状态机模块、发送数据逻辑模块、接收数据逻辑模块以及中断形式模块。
深入分析SPI的四种传输协议可以发现,根据一种协议,只要对串行同步时钟进行转换,就能得到其余的三种协议。为了简化设计规定,如果要连续传输多个数据,在两个数据传输之间插入一个串行时钟的空闲等待,这样状态机只需两种状态(空闲和工作)就能正确工作。