极角排序
前两天做个题,一直WA,不知道是不是因为极角排序用的atan2伤精度的问题,其实我觉得不应该 T T。。
这里讲了几种极角排序方法,http://www.csie.ntnu.edu.tw/~u91029/PointLinePlane2.html,我这里只说下atan2还有象限排序。
因为纯粹叉积是不能排360度的,所以需要改一些东西。
atan2是按向量排序的,这个很好啊,可是就是可能会伤精度,那么会死很惨的,虽然我还没遇到用atan2伤精度的题~
atan2的参数是向量的y坐标,x坐标,排序范围是(-180°, +180°]。
象限排序是不损精度的,因为只用到叉积还有一些比较而已。
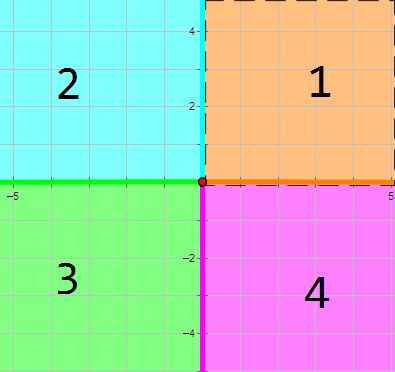
先判断两个点是在哪两个象限,然后如果不在同一个象限,直接象限比较,如果在同一个象限,那么用叉积比较即可,边界问题考虑下。
大小判定函数。
const double eps = 1e-6;
bool dy(double x,double y) { return x > y + eps;} // x > y
bool xy(double x,double y) { return x < y - eps;} // x < y
bool dyd(double x,double y) { return x > y - eps;} // x >= y
bool xyd(double x,double y) { return x < y + eps;} // x <= y
bool dd(double x,double y) { return fabs( x - y ) < eps;} // x == y
atan2排序
bool cmp(point& a,point& b)
{
double t1 = atan2(a.y - C.y, a.x - C.x);
double t2 = atan2(b.y - C.y, b.x - C.x);
if( dd(t1, t2) ) return xy(fabs(a.x),fabs(b.x));
return xy(a.t, b.t);
}
象限极角排序代码
int quad(point a)// 判断象限的函数,每个象限包括半个坐标轴
{
if( dy(a.x,0) && xyd(a.y,0) ) return 1;
if( xyd(a.x,0) && dy(a.y,0) ) return 2;
if( xy(a.x,0) && xyd(a.y,0) ) return 3;
if( dyd(a.x,0) && xy(a.y,0) ) return 4;
}
bool cmp(point& a,point& b)
{
point p1 = a,p2 = b;
p1.x -= C.x; p1.y -= C.y;
p2.x -= C.x; p2.y -= C.y;
int l1,l2;
l1 = quad(p1); l2 = quad(p2);
if( l1 == l2 )
{
double c = crossProduct(C,a,b);
return xy(c,0) || dd(c,0.0) && xy(fabs(a.x),fabs(b.x));
}
return l1 < l2;
}