opencv 金字塔图像分割
opencv中有封装好的cvPyrSegmentation函数,参数解释如下:
PyrSegmentation
用金字塔实现图像分割
void cvPyrSegmentation( IplImage* src, IplImage* dst,
CvMemStorage* storage, CvSeq** comp,
int level, double threshold1, double threshold2 );
src
输入图像.
dst
输出图像.
storage
Storage: 存储连通部件的序列结果
comp
分割部件的输出序列指针 components.
level
建立金字塔的最大层数
threshold1
建立连接的错误阈值
threshold2
分割簇的错误阈值
函数 cvPyrSegmentation 实现了金字塔方法的图像分割。金字塔建立到 level 指定的最大层数。如果 p(c(a),c(b))<threshold1,则在层 i 的象素点 a 和它的相邻层的父亲象素 b 之间的连接被建立起来,
定义好连接部件后,它们被加入到某些簇中。如果p(c(A),c(B))<threshold2,则任何两个分割 A 和 B 属于同一簇。
如果输入图像只有一个通道,那么
p(c1,c2)=|c1-c2|.
如果输入图像有单个通道(红、绿、兰),那幺
p(c1,c2)=0,3·(c1r-c2r)+0,59·(c1g-c2g)+0,11·(c1b-c2b) .
每一个簇可以有多个连接部件。图像 src 和 dst 应该是 8-比特、单通道 或 3-通道图像,且大小一样
Threshold1,Threshold2的解读:
看到别人博客里有人在问这两个参数的区别,其实就如上面黄色底纹文字所说,
金字塔分割先通过p(c(a),c(b))<threshold1在像素a,b...中找连通域,也就是所谓的连接部件A,B...
第二步通过p(c(A),c(B))<threshold2判断两个联通与是否属于同一个簇,簇即使我们最后得到的分割结果
例程:
void ON_SEGMENT(int a)
{
cvPyrSegmentation(images0, images1, storage, &comp,
level, threshold1+1, threshold2+1);
cvShowImage("Segmentation", images1);
}
void CCVMFCView::OnPyrSegmentation()
{
images[0] = cvCloneImage(workImg);
cvFlip(images[0]);
cvNamedWindow("Segmentation", 1);
storage = cvCreateMemStorage ( block_size );
images[0]->width &= -(1<<level);
images[0]->height &= -(1<<level);
images0 = cvCloneImage( images[0] );
images1 = cvCloneImage( images[0] );
// 对彩色图像进行分割
l = 1;
threshold1 =255;
threshold2 =30;
sthreshold1 = cvCreateTrackbar("Threshold1", "Segmentation",
&threshold1, 255, ON_SEGMENT);
sthreshold2 = cvCreateTrackbar("Threshold2", "Segmentation",
&threshold2, 255,ON_SEGMENT);
ON_SEGMENT(1);
cvWaitKey(0);
cvDestroyWindow( "Segmentation" );
cvFlip(images1);
images1->width = workImg->width;
images1->height = workImg->height;
cvReleaseMemStorage(&storage );
cvReleaseImage(&images[0]);
cvReleaseImage(&images0);
m_dibFlag=imageReplace(images1,&workImg);
m_ImageType=1;
Invalidate();
}
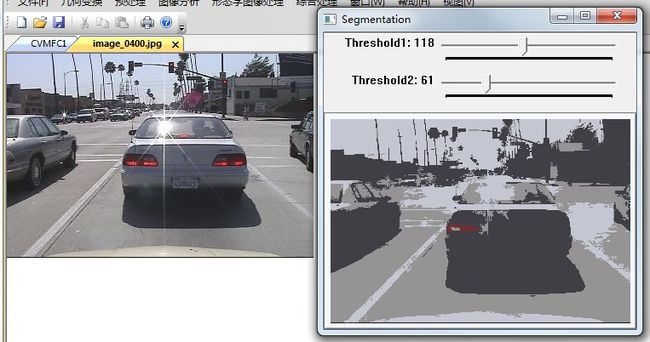
金字塔图像分割结果: