计算三角形费马点
1.在一个三角形中,到3个顶点距离之和最小的点叫做这个三角形的费马点。
2. 费马点计算方法:
(1)若三角形ABC的3个内角均小于120°,那么3条距离连线正好平分费马点所在的周角。所以三角形的费马点也称为三角形的等角中心。
(2)若三角形有一内角不小于120度,则此钝角的顶点就是距离和最小的点。3.如何计算等角中心呢?
做任意一条边的外接等边三角形,得到另一点,将此点与此边在三角形中对应的点相连
如此再取另一边作同样的连线,相交点即费马点
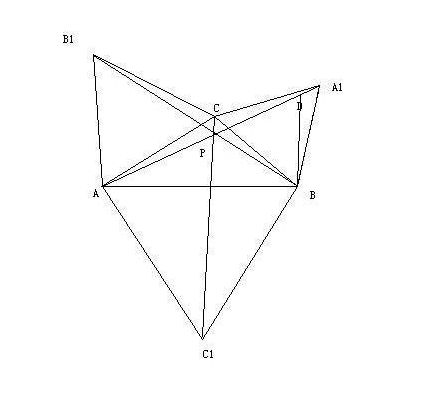
证明画几条辅助线就出来了~这里就不证明了
这是合肥OI竞赛一次比赛的题目,去给50中小朋友上课时写的标程:
#include <iostream>
#include <math.h>
#include <windows.h>
#include <iomanip>
using namespace std;
struct Vec
{
double x,y;
Vec(double xx=0,double yy=0)
{
x=xx;
y=yy;
}
};
struct Point
{
double x,y;
Point(double xx=0,double yy=0)
{
x=xx;
y=yy;
}
};
double ddot(Vec A,Vec B)
{
return A.x*B.x+A.y*B.y;
}
double getlen(Vec A)
{
return sqrt(A.x*A.x+A.y*A.y);
}
double getlen(Point A,Point B)
{
return sqrt((A.x-B.x)*(A.x-B.x)+(A.y-B.y)*(A.y-B.y));
}
bool moreThan120(double xa,double ya,double xb,double yb,double xc,double yc)
{
Vec ab(xb-xa,yb-ya),ac(xc-xa,yc-ya);
if (ddot(ab,ac)/getlen(ab)/getlen(ac) < -0.5)
{
return true;
}
return false;
}
inline void swap(double &a,double &b)
{
double t;
t=a;
a=b;
b=t;
}
Point getAnotherPoint(Point A,Point B,Point C)
{
Point r,C1,C2;
Vec AB(B.x-A.x,B.y-A.y);
double len,len2;
double sqrt3=sqrt(3.0);
Vec AB2,crossAB,crossAB2;
AB2.x=AB.x/2; AB2.y=AB.y/2;
crossAB.x=AB2.y; crossAB.y=-AB2.x;
crossAB2.x=-AB2.y; crossAB2.y=AB2.x;
len=getlen(AB2);
crossAB.x*=sqrt3; crossAB.y*=sqrt3;
crossAB2.x*=sqrt3; crossAB2.y*=sqrt3;
C1.x=A.x+AB2.x+crossAB.x;C1.y=A.y+AB2.y+crossAB.y;
C2.x=A.x+AB2.x+crossAB2.x;C2.y=A.y+AB2.y+crossAB2.y;
if (getlen(C,C1)<getlen(C,C2))
{
return C2;
}else
return C1;
}
/*
在平面内的两条直线AB,CD,求交点最直接的方法就是解下列的二元二次方程组:
Ax + (Bx - Ax)i = Cx + (Dx - Cx) j
Ay + (By - Ay)i = Cy + (Dy - Cy) j
交点是:
(Ax + (Bx - Ax) i, Ay + (By - Ay) i)
即:
Ax + (AAx)i = Bx + (BBx) j
Ay + (AAy)i = By + (BBy) j
交点是:
(Ax + (AAx)i, Ay + (AAy)i)
*/
Point getCrossPoint(Point A,Point A1,Point B,Point B1)
{
Point r;
Vec AA(A1.x-A.x,A1.y-A.y),BB(B1.x-B.x,B1.y-B.y);
double i,j,tmp,tmp2;
double Ax=A.x,Ay=A.y,AAx=AA.x,AAy=AA.y,Bx=B.x,By=B.y,BBx=BB.x,BBy=BB.y;
if (AAx==0)
{
j=(Ax-Bx)/BBx;
i=(By+BBy*j-Ay)/AAx;
}else if (BBx==0)
{
i=(Bx-Ax)/AAx;
}else if (AAy==0)
{
j=(Ay-By)/BBy;
i=(Bx-Ax-BBx*j)/AAx;
}else if (BBy==0)
{
i=(By-Ay)/AAy;
}
else
{
tmp=AAx;
tmp2=AAy;
Ax*=AAy;AAx*=AAy;Bx*=AAy;BBx*=AAy;
Ay*=tmp;AAy*=tmp;By*=tmp;BBy*=tmp;
j=((Ax-Ay)-(Bx-By))/(BBx-BBy);
i=(Bx+BBx*j-Ax)/AAx;
}
r.x=(Ax+AAx*i)/tmp2;
r.y=(Ay+AAy*i)/tmp;
return r;
}
int main()
{
freopen("cul.in9","r",stdin);
double xa,ya,xb,yb,xc,yc;
Point C1,A1,R;
cin>>xa>>ya>>xb>>yb>>xc>>yc;
cout.setf(ios::fixed);
if (moreThan120(xa,ya,xb,yb,xc,yc))
{
cout<<setprecision(10)<<xa<<" "<<ya<<endl;
}else if (moreThan120(xb,yb,xa,ya,xc,yc))
{
cout<<setprecision(10)<<xb<<" "<<yb<<endl;
}else if (moreThan120(xc,yc,xa,ya,xb,yb))
{
cout<<setprecision(10)<<xc<<" "<<yc<<endl;
}else
{
C1=getAnotherPoint(Point(xa,ya),Point(xb,yb),Point(xc,yc));
A1=getAnotherPoint(Point(xc,yc),Point(xb,yb),Point(xa,ya));
R=getCrossPoint(Point(xa,ya),A1,Point(xc,yc),C1);
cout<<setprecision(10)<<R.x<<" "<<R.y<<endl;
}
Sleep(1000000);
}