opencv学习笔记-入门(25)Mat 的学习
(一)Mat矩阵中数据指针Mat.data是uchar类型指针,CV_8U系列可以通过计算指针位置快速地定位矩阵中的任意元素。
二维单通道元素可以用Mat::at(i, j)访问,i是行序号,j是列序号。
但对于多通道的非unsigned char类型矩阵来说,以上方法都不好(注:后来知道可以通过类型转换,用指针访问data数据,见后文)。可以用Mat::ptr()来获得指向某行元素的指针,在通过行数与通道数计算相应点的指针。
参照OpenCV的Mat::at()函数,写了一个访问二维Mat矩阵的两个简单的小函数,没有边界检查。
1 |
#include <opencv2/core/core.hpp> |
2 |
3 |
template<typename ItemType> |
4 |
ItemType* getMatPointPtr(cv::Mat & src, int i , int j , int c = 0) |
5 |
{ |
6 |
ItemType* curRow = src.ptr<ItemType>(i); |
7 |
return curRow + j * src.channels() + c; |
8 |
} |
9 |
template<typename ItemType> |
10 |
ItemType getMatPoint(cv::Mat & src, int i , int j , int c = 0) |
11 |
{ |
12 |
ItemType* curRow = src.ptr<ItemType>(i); |
13 |
return *(curRow + j * src.channels() + c); |
14 |
} |
OpenCV中的Mat::at()代码有严格的边界检测,Mat::ptr()也有边界检测,但代码中没有检测j是否越界。
以上为推荐使用的情况,下边的不推荐使用。
可以通过转换指针类型,访问非uchar类型的Mat元素。
例如图像是CV_64FC1格式,可以将Mat.data指针直接转换成double*类型:
1 |
// imgMat is a image. |
2 |
double* pimg = (double*)(imgMat.data) |
也可以用C++中的显式转换符static_cast,不过要通过void*类型过渡:
1 |
void* pvoid = static_cast<void*>(imgMat.data); |
2 |
double* pimg = static_cast<double*>(pvoid); |
这种方式在Debug模式下速度提升非常显著,但没有任何的边界检查和异常处理,使用时必须十分小心。使用Mat::ptr的速度和直接使用这种方法差不多,多一层保护总比没有保护强。
(二)
Mat A, C; //只创建信息头部分 A = imread(argv[1], CV_LOAD_IMAGE_COLOR); //这里为矩阵开辟内存 MatB(A); //使用拷贝构造函数 C = A; //赋值运算符
Mat D(A, Rect(10, 10, 100, 100)); //using a rectangle Mat E = A(Range:all(), Range(1, 3)); //using row and column boundaries
Mat F = A.clone(); Mat G; A.copyTo(G);
9.现在改变 F 或者 G 就不会影响 Mat 信息头所指向的矩阵。总结一下,你需要记住的是
- OpenCV函数中输出图像的内存分配是自动完成的(如果不特别指定的话)。
- 使用OpenCV的C++接口时不需要考虑内存释放问题。
- 赋值运算符和拷贝构造函数( ctor )只拷贝信息头。
- 使用函数 clone() 或者 copyTo() 来拷贝一副图像的矩阵。
补充(空间存储):
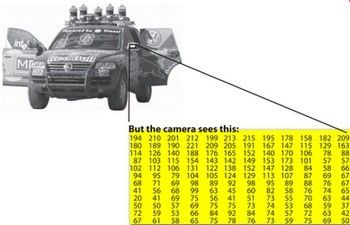
10.对于 彩色 方式则有更多种类的颜色空间,但不论哪种方式都是把颜色分成三个或者四个基元素,通过组合基元素可以产生所有的颜色。- HSV和HLS把颜色分解成色调、饱和度和亮度/明度。这是描述颜色更自然的方式,比如可以通过抛弃最后一个元素,使算法对输入图像的光照条件不敏感。
- YCrCb在JPEG图像格式中广泛使用。
- CIE L*a*b*是一种在感知上均匀的颜色空间,它适合用来度量两个颜色之间的 距离 。
显式地创建一个 Mat 对象
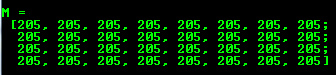
Mat M(2,2, CV_8UC3, Scalar(0,0,255));
cout << "M = " << endl << " " << M << endl << endl;
然后,需要指定存储元素的数据类型以及每个矩阵点的通道数。为此,依据下面的规则有多种定义
CV_[The number of bits per item][Signed or Unsigned][Type Prefix]C[The channel number]14.比如 CV_8UC3 表示使用8位的 unsigned char 型,每个像素由三个元素组成三通道。预先定义的通道数可以多达四个。 Scalar 是个short型vector。指定这个能够使用指定的定制化值来初始化矩阵。当然,如果你需要更多通道数,你可以使用大写的宏并把通道数放在小括号中,如下所示
15.在 C\C++ 中通过构造函数进行初始化
int sz[3] = {2,2,2};
Mat L(3,sz, CV_8UC(1), Scalar::all(0));
16.上面的例子演示了如何创建一个超过两维的矩阵:指定维数,然后传递一个指向一个数组的指针,这个数组包含每个维度的尺寸;其余的相同
-
为已存在IplImage指针创建信息头:
IplImage* img = cvLoadImage("greatwave.png", 1); Mat mtx(img); // convert IplImage* -> Mat
-
Create() function: 函数
M.create(4,4, CV_8UC(2)); cout << "M = "<< endl << " " << M << endl << endl;
17.这个创建方法不能为矩阵设初值,它只是在改变尺寸时重新为矩阵数据开辟内存。
-
MATLAB形式的初始化方式: zeros(), ones(), :eyes() 。使用以下方式指定尺寸和数据类型:
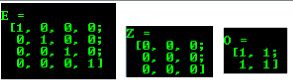
Mat E = Mat::eye(4, 4, CV_64F); cout << "E = " << endl << " " << E << endl << endl; Mat O = Mat::ones(2, 2, CV_32F); cout << "O = " << endl << " " << O << endl << endl; Mat Z = Mat::zeros(3,3, CV_8UC1); cout << "Z = " << endl << " " << Z << endl << end
*对于小矩阵你可以用逗号分隔的初始化函数:
Mat C = (Mat_<double>(3,3) << 0, -1, 0, -1, 5, -1, 0, -1, 0); cout << "C = " << endl << " " << C << endl << endl;

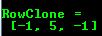
*使用 clone() 或者 copyTo() 为一个存在的 Mat 对象创建一个新的信息头。
Mat RowClone = C.row(1).clone(); cout << "RowClone = " << endl << " " << RowClone << endl << endl;
-