PI control model----PID controlor
仅仅是P控制的话有还是有缺憾的,静差永远无法消除,系数小的时候静差大,系数大的时候稳定性差
因此想办法要改进P控制器,于是,加入I控制器,形成PI控制器
I on the accumulation of past errors——维基百科
利用对以往误差的积分实现消除静差!
% Code writer:EOF % Time : 2013.09.23 In XTU % % This code just used for understand how PID work .So you may not to be % intertwind with this code how to work! % Matlab language is not like the C language which is strict to detail of a % description of problems % What I want to say is that you should understand what is PID and then % program it clear all clc syms s hold on %% abstract the object which is controled into a function 1/(s^2+3*s+1) num = 1; den = sym2poly(s^2+3*s+1); G = tf(num,den); %% Set up the coefficient %-------------------------- H = 1;%THE TARGET VALUE!! %-------------------------- % PID系数 Kp = 20;% coefficient of PID Ki = 1; Kd = 0; %% Set up the coefficient controlor C = pid(Kp,Ki,Kd);% set up a PID controlor T = feedback(C*G,H);%backforward loop step(T) Kp = 20;% coefficient of PID Ki = 10; Kd = 0; C = pid(Kp,Ki,Kd);% set up a PID controlor T = feedback(C*G,H);%backforward loop step(T)
首先观察Kp = 20,Ki = 1和Kp = 20,Ki = 10这两条曲线,相比较而言,前者pi比例是20:1,后者是2:1

很明显,在比例作用大的蓝色曲线中任然存在静差,但是相对而言,过调的程度要小
在积分作用相对而言大的绿色曲线中,过调虽然严重(相对而言),但是很好的消除了静差
于是有,在一定范围内,Kp ,Ki的比例值从大减小的时候输出稳定性减弱,但是静差缩小
下面探讨Kp ,Ki比例相同的情况下,Kp或者Ki'值变化的情况
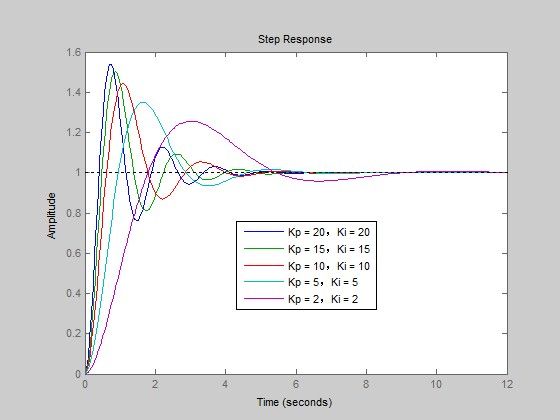
可以发现,在比值不变的的情况下,随着Kp(或者Ki)的增大,过调的现象越来越严重,波动频繁,但是稳定时间缩短
反而言之,在比值不变的的情况下,随着Kp(或者Ki)的减小,过调的现象越来越小,波动频率减小,但是稳定时间增长(如图紫色曲线的稳定时间是最长的)
根据整定口诀,可以对参数进行调整,然后得到好的曲线输出
最后看看stephen怎么说
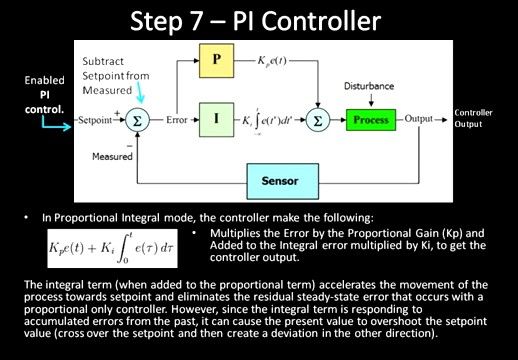
大意:PI模型就是将误差与比例系数Kp相乘,然后加上,误差对时间的积分乘以积分系数Ki,将得到的结果作为控制输出
PI模型中的积分项加速了输出向参考期望值靠近,消除了在仅有P控制的模型中产生的静差
然而,因为积分项是对过去误差的积分,它能产生过调
(我认为,这里其实应该加上一句话,当Pi系数比较大的时候才会产生过调)
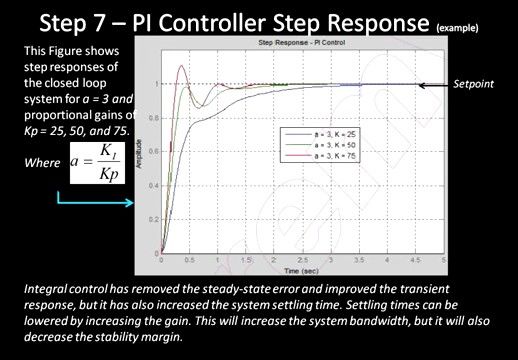
积分控制器消除了静差,提升了暂态响应,但是他同样增加了系统的从开始到稳定的时间
而这段时间是可以通过增加Pi系数来减小的。同样,这又会增加系统的波动带宽,降低了稳定性输出