深入浅出游戏算法(2)-图形数学基础(1)
一、右手坐标系
直角坐标系的 x-轴,y-轴,与 z-轴必须相互垂直。称包含 z-轴的直线为 z-线。在三维空间里,当我们设定了 x-轴,y-轴的位置与方向的同时,我们也设定了 z-线的方向。可是,我们仍旧必须选择,在 z-线以原点为共同点的两条半线中,那一条半线的点的坐标是正值的,那一条是负值的?这两种不同的坐标系统,称为右手坐标系与左手坐标系。右手坐标系又称为标准坐标系,或正值坐标系。(左边为左手坐标系,右边为右手坐标系)
右手坐标系这名词是由右手定则而来的。先将右手的手掌与手指伸直。然后,将中指指向往手掌的掌面 半空间,与食指呈直角关系。再将大拇指往上指去,与中指,食指都呈直角关系。则大拇指,食指,与中指分别表示了右手坐标系的 x-轴,y-轴,与 z-轴。同样地,用左手也可以表示出左手坐标系。
三维坐标系分类
1、世界坐标系
描述整个世界或整个场景的每件事物(包括人、动物等)的位置,作为三维坐标系,描述的方式是会标(x,y,z),分别代表了事物在三维坐标系中X、Y、Z轴的坐标。
2、物体坐标系
每个物体内部的坐标体系,以度量物体组成部分之间的相对位置,物体如果发生移动,相对世界坐标系而言,物体坐标系也随之整体移动。
3、惯性坐标系统,与物体坐标系不同之处在于,它们的轴方向不同,但它们原点位置相同,这意味着,惯性坐标系通过旋转可与物体坐标系统重合,惯性坐标系通过平移可与世界坐标系统重合。
4、坐标转换:
通过将物体坐标系先旋转成为惯性坐标系,然后再平移成为世界坐标系。
二、向量
标量仅为单个数值,而向量可以由多个或单个数值(标量可以视为一维向量)组成,向量有大小和方向,大小即模长,方向即向量的指向,向量中数值的数量为向量的维度。一维向量可以表示为[v1],而二维向量可表示为[v1,v2],三维向量可表示为[v1,v2.v3],n维向量可表示为[v1,v2,...,vn]。
向量的2个度量属性方向与长度决定了向量可以描述物体在空间中的运动,其长度是物体移动的距离,但不是位置,位置可描述坐标系中的一个点,位置通常用(x,y,z)这种用圆括号包围的方式表示。其方向是运动的方向。比如:[3,-2,9]表示,物体向X正轴方向移动3个单位,向Y负轴方向移动2个单位,向Z正轴方向移动9个单位,可以同时移动,也可以依次移动。
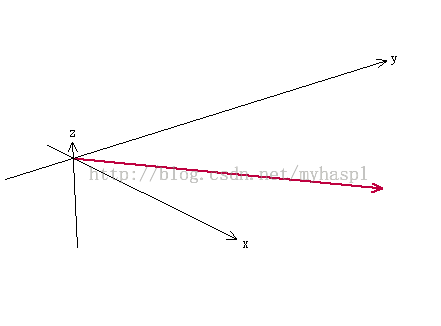
下图描述了向量[5,9,-2],它从(0,0,0)出发到(5,9,-2),图中向量表现为具有一定长度、指定方向(用箭头表示)的直线,它在X轴和Y轴上均为正方向,而在Z轴上为负方向。
麦好的AI乐园博客所有内容是原创,如果转载请注明来源
http://blog.csdn.net/myhaspl/
对于n维向量V[v1,v2,...,vn],其模长计算公式为:

上图中的所示向量的长度为:
![]()