CCActionEase(2)
本文函数图像使用GeoGebra绘制,感谢它才华横溢的作者。
相比之前的速度正弦变化动作(这个东西叫什么更好一些?渐变动画?)与速度指数级变化动作,CCEaseIn/CCEaseOut/CCEaseInOut更具灵活性。你可以设置运动的速率,甚至是在运动的过程中改变速率。它们拥有共同的基类——CCEaseRateAction。不要直接使用CCEaseRateAction,因为它没有实现任何变化效果。
7)CCEaseIn
按照惯例贴出update函数的源代码,以免版本更新导致文不对题。
1 void CCEaseIn::update(ccTime time)
2 {
3 m_pOther->update(powf(time, m_fRate));
4 }
根据此函数的实现推导出以下三个公式:
s(t)=t^r t∈[0,1]
v(t)=s'(t)=r*t^(r-1) t∈[0,1]
a(t)=v'(t)=r*(r-1)*t^(r-2) t∈[0,1]
s:路程 v:速度 a:加速度 t:时间 r:速率参数m_fRate
都是很基本的导函数推导,如果有不清楚的地方,建议先复习下导数。
下面我们着重分析下速率参数,也就是r的取值范围。因为是讨论二元函数,图像是三维的,画出后重叠在一起反而不利于理解,这里就没有作图。
1.r<0
当r<0时,v(t)将始终保持为负数,也就是说速度的方向与设定的方向正好相反。
又因为s(1)=1,这说明精灵最后移动到了目标点坐标,但它是从预设轨迹的延长线上反向移动到这一坐标点的。
这是一个很奇怪的动作行为,跟我们预想的设计不符,所以r的取值不应小于零。
2.r=0
当r=0时,s(t)恒等于1,也就说动作在开始之前就已经达到了完成的状态。我们这里说的是动作的表现,动作原本的执行时间是不受此影响的。
很明显,这与我们的设计不符,所以零也不是r的一个取值。
3.0<r<1
当r的取值范围在(0,1)时,a(t)恒为负数,加速度为负说明速度是越来越慢的,这与CCEaseXxxxIn动作应该由慢至快的设定不符,所以这也不是r应有的取值范围。
4.r=1
当r=1时,a(t)恒等于零,v(t)恒等于一,这说明此时的动作是速度为1的匀速运动。这貌似与设定的有慢至快也不相符。
5.1<r<2
当r的取值范围在(1,2)时,加速度a(t)恒大于零,但呈下降趋势。
6.r=2
当r=2是,a(t)恒等于2,也就是此时为匀加速运动。
7.r>2
当r>2时,加速度a(t)恒大于零,且呈上升趋势。
综上所述,当你使用CCEaseIn时,传入的速率参数应大于1.0f,并且根据取值范围的不同,会呈现出3种不太一样的加速运动。
8)CCEaseOut
我们再来看一下CCEaseOut的update函数。
1 void CCEaseOut::update(ccTime time)
2 {
3 m_pOther->update(powf(time, 1 / m_fRate));
4 }
第一步还是需要推导出路程、速度、加速度的公式:
s(t)=t^(1/r) t∈[0,1]
v(t)=s'(t)=1/r*(t^(1/r-1)) t∈[0,1]
a(t)=v'(t)=1/r*(1/r-1)*(t^(1/r-2)) t∈[0,1]
第二步分析r的取值范围:
1.r<0
当r<0时,CCEaseOut的情况与CCEaseIn一样,运动不在预设轨迹上,排除。
2.r=0
除数不能为零,排除。
3.0<r<1
当r的取值范围在(0,1)时,a(t)恒大于零,这说明速度是越来越快的,这与CCEaseXxxxOut由快至慢的设定不符,排除。
4.r=1
当r=1时,a(t)恒等于零,这说明是匀速运动,不符合设定,排除。
5.r>1
当r>1时,加速度a(t)恒小于零,但呈上升趋势。
综上所述,当你使用CCEaseOut时,传入的速率参数应大于1.0f,与CCEaseIn不同的是,CCEaseOut只有一类加速度变化趋势。
在继续后面的研究之前,我们来做一些额外的思考。CCEaseOut中r的取值为什么与CCEaseIn的有些不一样呢?是不是它的设计存在什么不合理的地方?
假设我们将r设定为3,同时画出CCEaseIn和CCEaseOut的图像:
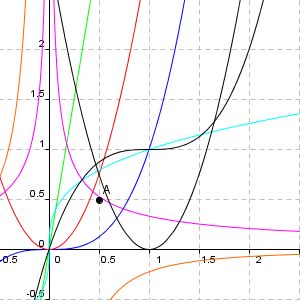
颜色有点儿乱,不过没办法,里面包含3套对比数据,我直接说颜色,希望大家别迷糊。
那条红色曲线是CCEaseIn的v(t)函数,那条分数的是CCEaseOut的v(t)函数。
大家都知道CCEaseXxxxIn与CCEaseXxxxOut动作的区别是,前者由慢到快,后者由快到慢。如果说得更精确些,它们的表现应该是对称的——速度函数v(t)按照x=0.5直线轴对称。
但是显而易见的,红色曲线和粉色曲线根本不对称。
如果大家再仔细想想之前正弦变化和指数级变化的图像,这里还存在一处对称。那就是,路程函数s(t)的图像应该是按照点A(0.5,0.5)中心对称的。
那条蓝色曲线是CCEaseIn的s(t)函数,那条兰色的是CCEaseOut的s(t)函数。
可以很明显地看出,它们是按照y=x直线轴对称的,而不是按照点A中心对称。
我们将红色曲线按照x=0.5直线做轴对称镜像,得到那条黑色的抛物线。再对此抛物线求其反导函数图像,得到那条黑色曲线。瞧,它与那条蓝色曲线是不是按照点A中心对称的。
所以,我认为CCEaseOut的update函数应该修改一下。如果你有不同的见解,欢迎在评论区留言。
附上我修改后的代码:
1 void CCEaseOut::update(ccTime time)
2 {
3 m_pOther->update(1.0f - powf((1.0f - time), m_fRate));
4 }
如果按我这样修改,那么速率参数的取值范围与CCEaseIn中是一样的,大于一。
9)CCEaseInOut
好了,继续我们的研究:
1 void CCEaseInOut::update(ccTime time)
2 {
3 int sign = 1;
4 int r = (int) m_fRate;
5
6 if (r % 2 == 0)
7 {
8 sign = -1;
9 }
10
11 time *= 2;
12 if (time < 1)
13 {
14 m_pOther->update(0.5f * powf(time, m_fRate));
15 }
16 else
17 {
18 m_pOther->update(sign * 0.5f * (powf(time - 2, m_fRate) + sign * 2));
19 }
20 }
必须指出,这个函数的实现是有问题的。
第一,难道引擎的设计者只希望我们传入整数型的速率吗?
问题出在powf函数调用上。
我们知道传入的time参数范围在[0,1],即便中间做了一次乘2的操作,到了后面time-2依然是小于等于零的。所以在某些情况下,powf会出现问题。
比如,当m_fRate设置为3.5f之类的小数时,这里的powf会返回"-1.#IND000"。
于是,当动作执行到后半段时,精灵会消失,直到动作全部完成,精灵才会出现在终点上。
第二,那个sign正负标志是用来解决问题的吗?怎么感觉引入后反而将问题复杂化了。
这里其实只需将前半段的函数按照点(0.5,0.5)做一次中点对称就可以了,用不着这么麻烦。
我修改的代码如下:
1 void CCEaseInOut::update(ccTime time)
2 {
3 time *= 2;
4 if (time < 1)
5 {
6 m_pOther->update(0.5f * powf(time, m_fRate));
7 }
8 else
9 {
10 m_pOther->update(0.5f * (2.0f - powf((2.0f - time), m_fRate)));
11 }
12 }
因为CCEaseInOut与CCEaseIn使用相同的算法,所以在这里速率参数的取值范围与CCEaseIn的一样,也是大于一。
小结
到目前为止,我们对CCActionEase的学习已经完成了一半。
我们一共学习了3类,9个动作。它们分别是CCEaseSineIn、CCEaseSineOut、CCEaseSineInOut、CCEaseExponentialIn、CCEaseExponentialOut、CCEaseExponentialInOut、CCEaseIn、CCEaseOut、CCEaseInOut。
它们与之后将要学习的动作的最大区别是,在这些动作的执行过程中,精灵会严格地按照内部动作指定的路径移动,绝对不会超出起始点与终点的范围。
在CCEaseIn/CCEaseOut/CCEaseInOut中,速度的变化范围是[0,m_fRate],m_fRate>1。
但是,如果cocos2d-x需要与cocos2d-iphone从原则上保持高度一致,即便是存在缺陷也不能破坏原则的话,那么我推测官方在短时间内是不会修改这个问题的。因为,在大约6个月之前,有朋友提出过此问题,但似乎被无视了。
http://www.cocos2d-iphone.org/forum/topic/20979
http://code.google.com/p/cocos2d-iphone/issues/detail?id=1248
所以,在官方正式修正此问题之前,我建议大家只使用大于1的整数作为速率的参数,以提高兼容性。