【android】根据init.rc启动action和service
一、init.rc语法规则
1.init.rc文件的内容主要分类
动作(Action)
命令(Commands)
服务(Services)
选项(Options)
触发(trigger)
2.动作和命令一起使用
on <trigger> <command> <command> <command>
2.1.trigger是触发条件,为真执行命令
trigger有以下几种类型
boot /init.conf加载完毕时触发 <name>=<value> 当<name>被设置为<value>时触发 device-added-<path> device-removed-<path> 设备<path>被添加移除时触发 service-exited-<name> 当服务<name>退出时触发
3.服务和选项一起使用
service <name> <pathname> [ <argument> ]* <option> <option>
3.1.option选项
critical disabled setenv <name> <value> socket <name> <type> <perm> [ <user> [ <group> ] ] user <username> group <groupname> [ <groupname> ]* oneshot class <name> onrestart
二、init.rc文件的解析
1.init_parse_config_file
在system/core/init/init.c文件的main函数中调用
init_parse_config_file("/init.rc");
函数将init.rc作为参数读取进来
int init_parse_config_file(const char *fn)
{
char *data;
data = read_file(fn, 0); //读取init.rc文件到data中
if (!data) return -1;
parse_config(fn, data); //解析配置
DUMP();
return 0;
}
2.解析配置parse_config
static void parse_config(const char *fn, char *s)
{
struct parse_state state;
char *args[INIT_PARSER_MAXARGS];
int nargs;
nargs = 0;
state.filename = fn;
state.line = 1;
state.ptr = s; //指向init.rc的数据
state.nexttoken = 0;
state.parse_line = parse_line_no_op; //空操作
for (;;) {
switch (next_token(&state)) { //-->3.next_token跳过注释等,筛选需要解析的行
case T_EOF: //文件末尾
state.parse_line(&state, 0, 0); //后面参数为 0, 0所以直接返回
return;
case T_NEWLINE: //新行解析
if (nargs) { //有文本参数
int kw = lookup_keyword(args[0]); //解析关键词-->4.lookup_keyword
if (kw_is(kw, SECTION)) { //判断是否section类-->5.kw_is
state.parse_line(&state, 0, 0); //后面参数为 0, 0所以直接返回
parse_new_section(&state, kw, nargs, args); //6.parse_new_section
}
else {
state.parse_line(&state, nargs, args); //解析前一行parse_line_service或parse_line_action
}
nargs = 0; //nargs参数个数清0
}
break;
case T_TEXT: //文本
if (nargs < INIT_PARSER_MAXARGS) {
args[nargs++] = state.text; //保存文本参数,nargs++
}
break;
}
}
}
T_TEXT分支记录参数信息 例如
on early-init
symlink /initlogo.rle.bak /initlogo.rle
则会记录成
args[0]=on, args[1]=early-init -->换行
args[0]=symlink, args[1]=/initlogo.rle.bak, args[2]=/initlogo.rle -->换行
记录完后换新行会进入T_NEWLINE分支,分支会解析上一行的args[0],提取关键字,判断关键字类型做处理
如果是on和service关键词会调用parse_new_section处理,如果不是则调用state.parse_line函数处理,
parse_line函数可以是parse_line_service【service】或parse_line_action【on】
该parse_line函数主要是解析on/service后面带的command/options
正如例子中,on early-init 调用parse_new_section设置parse_line函数为parse_line_action
接着处理【on的command】symlink /initlogo.rle.bak /initlogo.rle的时候则调用parse_line函数parse_line_action
等到所有都处理完了则进入T_EOF分支,T_EOF分支return,跳出循环体
3.next_token
int next_token(struct parse_state *state)
{
char *x = state->ptr;
char *s;
if (state->nexttoken) {
int t = state->nexttoken;
state->nexttoken = 0;
return t;
}
for (;;) {
switch (*x) {
case 0: //文件结尾
state->ptr = x;
return T_EOF;
case '\n': //换行
state->line++; //行数++
x++;
state->ptr = x;
return T_NEWLINE;
case ' ': //空格
case '\t': //tab制表
case '\r': //回车
x++;
continue;
case '#': //注释
while (*x && (*x != '\n')) //跳过注释直到换行
x++;
state->line++; //行数++
state->ptr = x;
return T_NEWLINE;
default: //文本
goto text;
}
}
textdone:
state->ptr = x;
*s = 0;
return T_TEXT;
text:
state->text = s = x;
textresume:
for (;;) {
switch (*x) {
case 0: //文本结束
goto textdone;
case ' ': //空格
case '\t': //tab制表
case '\r': //回车
x++;
goto textdone;
case '\n': //换行
state->nexttoken = T_NEWLINE;
x++;
goto textdone;
case '"': //引号括起
x++;
for (;;) {
switch (*x) {
case 0:
state->ptr = x;
return T_EOF;
case '"': //引号结束
x++;
goto textresume;
default: //引号括起的内容
*s++ = *x++;
}
}
break;
case '\\': //转义字符
x++;
switch (*x) {
case 0:
goto textdone;
case 'n':
*s++ = '\n';
break;
case 'r':
*s++ = '\r';
break;
case 't':
*s++ = '\t';
break;
case '\\':
*s++ = '\\';
break;
case '\r':
/* \ <cr> <lf> -> line continuation */
if (x[1] != '\n') {
x++;
continue;
}
case '\n':
/* \ <lf> -> line continuation */
state->line++;
x++;
/* eat any extra whitespace */
while((*x == ' ') || (*x == '\t')) x++;
continue;
default:
/* unknown escape -- just copy */
*s++ = *x++;
}
continue;
default: //复制文本到s
*s++ = *x++;
}
}
return T_EOF;
}
4.lookup_keyword
int lookup_keyword(const char *s)
{
switch (*s++) {
case 'c':
if (!strcmp(s, "opy")) return K_copy;
if (!strcmp(s, "apability")) return K_capability;
if (!strcmp(s, "hdir")) return K_chdir;
if (!strcmp(s, "hroot")) return K_chroot;
if (!strcmp(s, "lass")) return K_class;
if (!strcmp(s, "lass_start")) return K_class_start;
if (!strcmp(s, "lass_stop")) return K_class_stop;
if (!strcmp(s, "onsole")) return K_console;
if (!strcmp(s, "hown")) return K_chown;
if (!strcmp(s, "hmod")) return K_chmod;
if (!strcmp(s, "ritical")) return K_critical;
break;
case 'd':
if (!strcmp(s, "isabled")) return K_disabled;
if (!strcmp(s, "omainname")) return K_domainname;
break;
case 'e':
if (!strcmp(s, "xec")) return K_exec;
if (!strcmp(s, "xport")) return K_export;
break;
case 'g':
if (!strcmp(s, "roup")) return K_group;
break;
case 'h':
if (!strcmp(s, "ostname")) return K_hostname;
break;
case 'i':
if (!strcmp(s, "oprio")) return K_ioprio;
if (!strcmp(s, "fup")) return K_ifup;
if (!strcmp(s, "nsmod")) return K_insmod;
if (!strcmp(s, "mport")) return K_import;
break;
case 'k':
if (!strcmp(s, "eycodes")) return K_keycodes;
break;
case 'l':
if (!strcmp(s, "oglevel")) return K_loglevel;
break;
case 'm':
if (!strcmp(s, "kdir")) return K_mkdir;
if (!strcmp(s, "ount")) return K_mount;
break;
case 'o':
if (!strcmp(s, "n")) return K_on;
if (!strcmp(s, "neshot")) return K_oneshot;
if (!strcmp(s, "nrestart")) return K_onrestart;
break;
case 'r':
if (!strcmp(s, "estart")) return K_restart;
break;
case 's':
if (!strcmp(s, "ervice")) return K_service;
if (!strcmp(s, "etenv")) return K_setenv;
if (!strcmp(s, "etkey")) return K_setkey;
if (!strcmp(s, "etprop")) return K_setprop;
if (!strcmp(s, "etrlimit")) return K_setrlimit;
if (!strcmp(s, "ocket")) return K_socket;
if (!strcmp(s, "tart")) return K_start;
if (!strcmp(s, "top")) return K_stop;
if (!strcmp(s, "ymlink")) return K_symlink;
if (!strcmp(s, "ysclktz")) return K_sysclktz;
break;
case 't':
if (!strcmp(s, "rigger")) return K_trigger;
break;
case 'u':
if (!strcmp(s, "ser")) return K_user;
break;
case 'w':
if (!strcmp(s, "rite")) return K_write;
if (!strcmp(s, "ait")) return K_wait;
break;
}
return K_UNKNOWN;
}
5.kw_is
5.1.kw_is宏定义
#define kw_is(kw, type) (keyword_info[kw].flags & (type))
5.2.keyword_info全局数组的定义
struct {
const char *name;
int (*func)(int nargs, char **args);
unsigned char nargs;
unsigned char flags;
} keyword_info[KEYWORD_COUNT] = {
[ K_UNKNOWN ] = { "unknown", 0, 0, 0 },
#include "keywords.h"
};
该数组包含了keywords.h文件
5.3.keywords.h文件内容
#ifndef KEYWORD
int do_chroot(int nargs, char **args);
int do_chdir(int nargs, char **args);
int do_class_start(int nargs, char **args);
int do_class_stop(int nargs, char **args);
int do_domainname(int nargs, char **args);
int do_exec(int nargs, char **args);
int do_export(int nargs, char **args);
int do_hostname(int nargs, char **args);
int do_ifup(int nargs, char **args);
int do_insmod(int nargs, char **args);
int do_import(int nargs, char **args);
int do_mkdir(int nargs, char **args);
int do_mount(int nargs, char **args);
int do_restart(int nargs, char **args);
int do_setkey(int nargs, char **args);
int do_setprop(int nargs, char **args);
int do_setrlimit(int nargs, char **args);
int do_start(int nargs, char **args);
int do_stop(int nargs, char **args);
int do_trigger(int nargs, char **args);
int do_symlink(int nargs, char **args);
int do_sysclktz(int nargs, char **args);
int do_write(int nargs, char **args);
int do_copy(int nargs, char **args);
int do_chown(int nargs, char **args);
int do_chmod(int nargs, char **args);
int do_loglevel(int nargs, char **args);
int do_wait(int nargs, char **args);
#define __MAKE_KEYWORD_ENUM__
#define KEYWORD(symbol, flags, nargs, func) K_##symbol,
enum {
K_UNKNOWN,
#endif
KEYWORD(capability, OPTION, 0, 0)
KEYWORD(chdir, COMMAND, 1, do_chdir)
KEYWORD(chroot, COMMAND, 1, do_chroot)
KEYWORD(class, OPTION, 0, 0)
KEYWORD(class_start, COMMAND, 1, do_class_start)
KEYWORD(class_stop, COMMAND, 1, do_class_stop)
KEYWORD(console, OPTION, 0, 0)
KEYWORD(critical, OPTION, 0, 0)
KEYWORD(disabled, OPTION, 0, 0)
KEYWORD(domainname, COMMAND, 1, do_domainname)
KEYWORD(exec, COMMAND, 1, do_exec)
KEYWORD(export, COMMAND, 2, do_export)
KEYWORD(group, OPTION, 0, 0)
KEYWORD(hostname, COMMAND, 1, do_hostname)
KEYWORD(ifup, COMMAND, 1, do_ifup)
KEYWORD(insmod, COMMAND, 1, do_insmod)
KEYWORD(import, COMMAND, 1, do_import)
KEYWORD(keycodes, OPTION, 0, 0)
KEYWORD(mkdir, COMMAND, 1, do_mkdir)
KEYWORD(mount, COMMAND, 3, do_mount)
KEYWORD(on, SECTION, 0, 0)
KEYWORD(oneshot, OPTION, 0, 0)
KEYWORD(onrestart, OPTION, 0, 0)
KEYWORD(restart, COMMAND, 1, do_restart)
KEYWORD(service, SECTION, 0, 0)
KEYWORD(setenv, OPTION, 2, 0)
KEYWORD(setkey, COMMAND, 0, do_setkey)
KEYWORD(setprop, COMMAND, 2, do_setprop)
KEYWORD(setrlimit, COMMAND, 3, do_setrlimit)
KEYWORD(socket, OPTION, 0, 0)
KEYWORD(start, COMMAND, 1, do_start)
KEYWORD(stop, COMMAND, 1, do_stop)
KEYWORD(trigger, COMMAND, 1, do_trigger)
KEYWORD(symlink, COMMAND, 1, do_symlink)
KEYWORD(sysclktz, COMMAND, 1, do_sysclktz)
KEYWORD(user, OPTION, 0, 0)
KEYWORD(wait, COMMAND, 1, do_wait)
KEYWORD(write, COMMAND, 2, do_write)
KEYWORD(copy, COMMAND, 2, do_copy)
KEYWORD(chown, COMMAND, 2, do_chown)
KEYWORD(chmod, COMMAND, 2, do_chmod)
KEYWORD(loglevel, COMMAND, 1, do_loglevel)
KEYWORD(ioprio, OPTION, 0, 0)
#ifdef __MAKE_KEYWORD_ENUM__
KEYWORD_COUNT,
};
#undef __MAKE_KEYWORD_ENUM__
#undef KEYWORD
#endif
5.4.结合KEYWORD宏拆开全局keyword_info数组可得
struct {
const char *name;
int (*func)(int nargs, char **args);
unsigned char nargs;
unsigned char flags;
} keyword_info[KEYWORD_COUNT] =
{
[ K_UNKNOWN ] = { "unknown", 0, 0, 0 },
[ K_capability ] = { "capability", 0, 0, OPTION },
[ K_chdir ] = { "chdir", do_chdir, 1, COMMAND },
[ K_chroot ] = { "chroot", do_chroot, 1, COMMAND },
[ K_class ] = { "class", 0, 0, OPTION, },
[ K_class_start ] = { "class_start", do_class_start, 1, COMMAND },
[ K_class_stop ] = { "class_stop", do_class_stop, 1, COMMAND },
[ K_console ] = { "console", 0, 0, OPTION },
[ K_critical ] = { "critical", 0, 0, OPTION },
[ K_disabled ] = { "disabled", 0, 0, OPTION },
[ K_domainname ] = { "domainname", do_domainname, 1, COMMAND },
[ K_exec ] = { "exec", do_exec, 1, COMMAND },
[ K_export ] = { "export", do_export, 2, COMMAND },
[ K_group ] = { "group", 0, 0, OPTION },
[ K_hostname ] = { "hostname", do_hostname, 1, COMMAND },
[ K_ifup ] = { "ifup", do_ifup, 1 COMMAND },
[ K_insmod ] = { "insmod", do_insmod, 1, COMMAND },
[ K_import ] = { "import", do_import, 1, COMMAND },
[ K_keycodes ] = { "keycodes", 0, 0, OPTION },
[ K_mkdir ] = { "mkdir", do_mkdir, 1, COMMAND },
[ K_mount ] = { "mount", do_mount, 3, COMMAND },
[ K_on ] = { "on", 0, 0, SECTION },///////////////////////
[ K_oneshot ] = { "oneshot", 0, 0, OPTION },
[ K_onrestart ] = { "onrestart", 0, 0, OPTION },
[ K_restart ] = { "restart", do_restart, 1, COMMAND },
[ K_service ] = { "service", 0, 0, SECTION },///////////////////////
[ K_setenv ] = { "setenv", 0, 2, OPTION },
[ K_setkey ] = { "setkey", do_setkey, 0, COMMAND },
[ K_setprop ] = { "setprop", do_setprop, 2, COMMAND },
[ K_setrlimit ] = { "setrlimit", do_setrlimit , 3, COMMAND },
[ K_socket ] = { "socket", 0, 0, OPTION },
[ K_start ] = { "start", do_start, 1, COMMAND },
[ K_stop ] = { "stop", do_stop, 1, COMMAND },
[ K_trigger ] = { "trigger", do_trigger, 1, COMMAND },
[ K_symlink ] = { "symlink", do_symlink, 1, COMMAND },
[ K_sysclktz ] = { "sysclktz", do_sysclktz, 1, COMMAND },
[ K_user ] = { "user", 0, 0, OPTION },
[ K_wait ] = { "wait", do_wait, 1, COMMAND },
[ K_write ] = { "write", do_write, 2, COMMAND },
[ K_copy ] = { "copy", do_copy, 2, COMMAND },
[ K_chown ] = { "chown", do_chown, 2, COMMAND },
[ K_chmod ] = { "chmod", do_chmod, 2, COMMAND },,
[ K_loglevel ] = { "loglevel", do_loglevel, 1, COMMAND },
[ K_ioprio ] = { "ioprio", 0, 0 OPTION },
}
5.5.同理可以理解
#define kw_name(kw) (keyword_info[kw].name) //根据关键词获取名字 #define kw_func(kw) (keyword_info[kw].func) //根据关键词获取处理函数指针 #define kw_nargs(kw) (keyword_info[kw].nargs) //根据关键词获取参数个数
6.parse_new_section
void parse_new_section(struct parse_state *state, int kw,int nargs, char **args)
{
printf("[ %s %s ]\n", args[0],nargs > 1 ? args[1] : "");
switch(kw) {
case K_service: //service类型-->三、service的处理
state->context = parse_service(state, nargs, args); //解析service
if (state->context) {
state->parse_line = parse_line_service; //设置parse_line函数,处理options
return;
}
break;
case K_on: //on类型 -->四、action的处理
state->context = parse_action(state, nargs, args); //解析action
if (state->context) {
state->parse_line = parse_line_action; //设置parse_line函数,处理command
return;
}
break;
}
state->parse_line = parse_line_no_op;
}
三、service的处理
1.相关结构体
struct service {
struct listnode slist;
const char *name;
const char *classname;
unsigned flags;
pid_t pid;
time_t time_started;
time_t time_crashed;
int nr_crashed;
uid_t uid;
gid_t gid;
gid_t supp_gids[NR_SVC_SUPP_GIDS];
size_t nr_supp_gids;
struct socketinfo *sockets;
struct svcenvinfo *envvars;
struct action onrestart;
int *keycodes;
int nkeycodes;
int keychord_id;
int ioprio_class;
int ioprio_pri;
int nargs;
char *args[1];
}
2.parse_service解析service
static void *parse_service(struct parse_state *state, int nargs, char **args)
{
struct service *svc;
if (nargs < 3) { //至少要三个service 服务名 应用程序路径
parse_error(state, "services must have a name and a program\n");
return 0;
}
if (!valid_name(args[1])) {
parse_error(state, "invalid service name '%s'\n", args[1]);
return 0;
}
svc = service_find_by_name(args[1]); //根据服务名找到service
if (svc) {
parse_error(state, "ignored duplicate definition of service '%s'\n", args[1]);
return 0;
}
nargs -= 2; //参数个数调整
svc = calloc(1, sizeof(*svc) + sizeof(char*) * nargs); //分配service和参数内存
if (!svc) {
parse_error(state, "out of memory\n");
return 0;
}
svc->name = args[1]; //服务名
svc->classname = "default"; //默认设置service->classname为"default",在init.rc有一句class_start default
memcpy(svc->args, args + 2, sizeof(char*) * nargs); //复制参数,参数中移除argc[0]和argc[1],从argc[2]复制起
svc->args[nargs] = 0; //最后一个参数值为0表示参数结束
svc->nargs = nargs; //设置服务的参数个数为更新后的参数个数
svc->onrestart.name = "onrestart";
list_init(&svc->onrestart.commands); //初始化命令链表
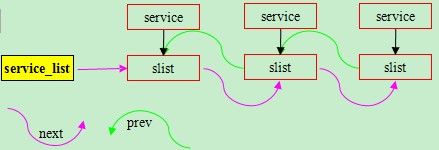
list_add_tail(&service_list, &svc->slist); //添加到全局service_list链表中
return svc;
}
3.parse_line_service解析service的选项
static void parse_line_service(struct parse_state *state, int nargs, char **args) //解析service的选项options
{
struct service *svc = state->context;
struct command *cmd;
int i, kw, kw_nargs;
if (nargs == 0) { //参数个数为0直接返回
return;
}
svc->ioprio_class = IoSchedClass_NONE;
kw = lookup_keyword(args[0]); //根据参数0获取关键词(选项Options)
switch (kw) {
case K_capability: //capability
break;
case K_class: //class
if (nargs != 2) {
parse_error(state, "class option requires a classname\n");
} else {
svc->classname = args[1];
}
break;
case K_console: //console
svc->flags |= SVC_CONSOLE;
break;
case K_disabled: //disabled
svc->flags |= SVC_DISABLED;
break;
case K_ioprio: //ioprio
if (nargs != 3) {
parse_error(state, "ioprio optin usage: ioprio <rt|be|idle> <ioprio 0-7>\n");
} else {
svc->ioprio_pri = strtoul(args[2], 0, 8);
if (svc->ioprio_pri < 0 || svc->ioprio_pri > 7) {
parse_error(state, "priority value must be range 0 - 7\n");
break;
}
if (!strcmp(args[1], "rt")) {
svc->ioprio_class = IoSchedClass_RT;
} else if (!strcmp(args[1], "be")) {
svc->ioprio_class = IoSchedClass_BE;
} else if (!strcmp(args[1], "idle")) {
svc->ioprio_class = IoSchedClass_IDLE;
} else {
parse_error(state, "ioprio option usage: ioprio <rt|be|idle> <0-7>\n");
}
}
break;
case K_group: //group
if (nargs < 2) {
parse_error(state, "group option requires a group id\n");
} else if (nargs > NR_SVC_SUPP_GIDS + 2) {
parse_error(state, "group option accepts at most %d supp. groups\n",
NR_SVC_SUPP_GIDS);
} else {
int n;
svc->gid = decode_uid(args[1]);
for (n = 2; n < nargs; n++) {
svc->supp_gids[n-2] = decode_uid(args[n]);
}
svc->nr_supp_gids = n - 2;
}
break;
case K_keycodes: //keycodes
if (nargs < 2) {
parse_error(state, "keycodes option requires atleast one keycode\n");
}
else {
svc->keycodes = malloc((nargs - 1) * sizeof(svc->keycodes[0]));
if (!svc->keycodes) {
parse_error(state, "could not allocate keycodes\n");
}
else {
svc->nkeycodes = nargs - 1;
for (i = 1; i < nargs; i++) {
svc->keycodes[i - 1] = atoi(args[i]);
}
}
}
break;
case K_oneshot: //oneshot
svc->flags |= SVC_ONESHOT;
break;
case K_onrestart: //onrestart
nargs--;
args++;
kw = lookup_keyword(args[0]);
if (!kw_is(kw, COMMAND)) {
parse_error(state, "invalid command '%s'\n", args[0]);
break;
}
kw_nargs = kw_nargs(kw);
if (nargs < kw_nargs) {
parse_error(state, "%s requires %d %s\n", args[0], kw_nargs - 1,kw_nargs > 2 ? "arguments" : "argument");
break;
}
cmd = malloc(sizeof(*cmd) + sizeof(char*) * nargs);
cmd->func = kw_func(kw);
cmd->nargs = nargs;
memcpy(cmd->args, args, sizeof(char*) * nargs);
list_add_tail(&svc->onrestart.commands, &cmd->clist);
break;
case K_critical: //critical
svc->flags |= SVC_CRITICAL;
break;
case K_setenv: //setenv
{ /* name value */
struct svcenvinfo *ei;
if (nargs < 2) {
parse_error(state, "setenv option requires name and value arguments\n");
break;
}
ei = calloc(1, sizeof(*ei));
if (!ei) {
parse_error(state, "out of memory\n");
break;
}
ei->name = args[1];
ei->value = args[2];
ei->next = svc->envvars;
svc->envvars = ei;
break;
}
case K_socket: //socket
{/* name type perm [ uid gid ] */
struct socketinfo *si;
if (nargs < 4) {
parse_error(state, "socket option requires name, type, perm arguments\n");
break;
}
if (strcmp(args[2],"dgram") && strcmp(args[2],"stream")&& strcmp(args[2],"seqpacket")) {
parse_error(state, "socket type must be 'dgram', 'stream' or 'seqpacket'\n");
break;
}
si = calloc(1, sizeof(*si));
if (!si) {
parse_error(state, "out of memory\n");
break;
}
si->name = args[1];
si->type = args[2];
si->perm = strtoul(args[3], 0, 8);
if (nargs > 4)
si->uid = decode_uid(args[4]);
if (nargs > 5)
si->gid = decode_uid(args[5]);
si->next = svc->sockets;
svc->sockets = si;
break;
}
case K_user: //user
if (nargs != 2) {
parse_error(state, "user option requires a user id\n");
}
else {
svc->uid = decode_uid(args[1]);
}
break;
default:
parse_error(state, "invalid option '%s'\n", args[0]);
}
}
四、action的处理
1.相关结构体
struct action {
struct listnode alist;
struct listnode qlist;
struct listnode tlist;
unsigned hash;
const char *name;
struct listnode commands;
struct command *current;
};
struct command
{
struct listnode clist;
int (*func)(int nargs, char **args);
int nargs;
char *args[1];
};
2.parse_action解析action
static void *parse_action(struct parse_state *state, int nargs, char **args)
{
struct action *act;
if (nargs < 2) { //on类型的参数必须为2个 args[0]=on,args[1]=触发条件[trigger]
parse_error(state, "actions must have a trigger\n");
return 0;
}
if (nargs > 2) { //多了也不行
parse_error(state, "actions may not have extra parameters\n");
return 0;
}
act = calloc(1, sizeof(*act)); //分配action结构体内存
act->name = args[1];
list_init(&act->commands) //初始化命令链表;
list_add_tail(&action_list, &act->alist); //添加到全局action_list链表中
return act;
}
3.parse_line_action解析command
static void parse_line_action(struct parse_state* state, int nargs, char **args) //解析command
{
struct command *cmd;
struct action *act = state->context;
int (*func)(int nargs, char **args);
int kw, n;
if (nargs == 0) { //参数个数为0直接返回
return;
}
kw = lookup_keyword(args[0]); //根据参数0,查找关键词
if (!kw_is(kw, COMMAND)) { //是否命令类型
parse_error(state, "invalid command '%s'\n", args[0]);
return;
}
n = kw_nargs(kw); //根据命令获取参数个数
if (nargs < n) {
parse_error(state, "%s requires %d %s\n", args[0], n - 1,n > 2 ? "arguments" : "argument");
return;
}
cmd = malloc(sizeof(*cmd) + sizeof(char*) * nargs); //分配命令和参数内存
cmd->func = kw_func(kw); //设置命令对应的函数
cmd->nargs = nargs; //设置参数个数
memcpy(cmd->args, args, sizeof(char*) * nargs); //复制参数
list_add_tail(&act->commands, &cmd->clist); //添加到state->context链表
}

五、service和action的执行
前面分析了:init解析init.rc文件并筛选出service和action,分别设置其结构体成员并添加进各自的全局链表service_list和action_list中
接着分析下service和action的执行
在init的main函数中除了解析init.rc(init_parse_config_file("/init.rc");)
还解析了跟硬件相关的
get_hardware_name(hardware, &revision);
snprintf(tmp, sizeof(tmp), "/init.%s.rc", hardware);
init_parse_config_file(tmp);
解析的结果都同样保存在全局链表service_list和action_list中
接着会有以下几行函数
action_for_each_trigger("early-init", action_add_queue_tail);
queue_builtin_action(wait_for_coldboot_done_action, "wait_for_coldboot_done");
queue_builtin_action(property_init_action, "property_init");
queue_builtin_action(keychord_init_action, "keychord_init");
queue_builtin_action(console_init_action, "console_init");
queue_builtin_action(set_init_properties_action, "set_init_properties");
action_for_each_trigger("init", action_add_queue_tail);
action_for_each_trigger("early-fs", action_add_queue_tail);
action_for_each_trigger("fs", action_add_queue_tail);
action_for_each_trigger("post-fs", action_add_queue_tail);
queue_builtin_action(property_service_init_action, "property_service_init");
queue_builtin_action(signal_init_action, "signal_init");
queue_builtin_action(check_startup_action, "check_startup");
action_for_each_trigger("early-boot", action_add_queue_tail);
action_for_each_trigger("boot", action_add_queue_tail);
queue_builtin_action(queue_property_triggers_action, "queue_propety_triggers");
1.action_for_each_trigger
void action_for_each_trigger(const char *trigger,void (*func)(struct action *act))
{
struct listnode *node;
struct action *act;
list_for_each(node, &action_list) { //遍历全局action_list
act = node_to_item(node, struct action, alist);
if (!strcmp(act->name, trigger)) { //比较名字和trigger触发条件
func(act); //符合触发条件,则执行action_add_queue_tail函数
}
}
}
1.1 action_add_queue_tail
void action_add_queue_tail(struct action *act)
{
list_add_tail(&action_queue, &act->qlist);
}
综合上面的action_for_each_trigger函数集,可知main函数
依次处理脚本中on标志以 early-init init early-fs fs post-fs early-boot boot的trigger的action
执行action_add_queue_tail函数将action添加到全局action_queue队列链表
2.queue_builtin_action
void queue_builtin_action(int (*func)(int nargs, char **args), char *name)
{
struct action *act;
struct command *cmd;
act = calloc(1, sizeof(*act)); //分配action内存
act->name = name; //设置名字
list_init(&act->commands); //初始化command链表
cmd = calloc(1, sizeof(*cmd)); //分配command
cmd->func = func; //设置执行函数为传递的第一个参数
cmd->args[0] = name; //设置command的参数0
list_add_tail(&act->commands, &cmd->clist); //添加command到action的commands链表中
list_add_tail(&action_list, &act->alist); //添加action到全局action_list链表中
action_add_queue_tail(act); //添加action到全局action_queue队列链表
}
创建以name标记的action,并添加进全局action_list中,同时添加进action_queue队列链表
所以全局action_queue队列链表中的顺序调整为
early-init [wait_for_coldboot_done] [property_init] [keychord_init] [console_init] [set_init_properties]
init early-fs fs post-fs [property_service_init] [signal_init] [check_startup] early-boot boot [queue_propety_triggers]
接着进入main的for(;;)循环体
3.execute_one_command执行一个command
void execute_one_command(void)
{
int ret;
//第一次执行cur_action为0,执行完某个action下的所有command后cur_command为0,条件为真
if (!cur_action || !cur_command || is_last_command(cur_action, cur_command)) {
cur_action = action_remove_queue_head(); //获取下一个action
cur_command = NULL;
if (!cur_action)
return;
INFO("processing action %p (%s)\n", cur_action, cur_action->name);
cur_command = get_first_command(cur_action); //获取action的第一个command
}
else { //循环执行某个action下的所有command
cur_command = get_next_command(cur_action, cur_command); //获取action的下一个command
}
if (!cur_command) //没有command可取了,则cur_command=0
return; //返回
ret = cur_command->func(cur_command->nargs, cur_command->args); //执行command的处理函数
INFO("command '%s' r=%d\n", cur_command->args[0], ret);
}
因为execute_one_command套在for(;;)中所以会循环执行action_queue队列链表下的action的command
4.service_list下的服务的执行
4.1service由service_start启动
搜索代码遍历调用service_start的分支:
KEYWORD(class_start, COMMAND, 1, do_class_start) do_class_start->service_for_each_class->service_start_if_not_disabled->service_start KEYWORD(start, COMMAND, 1, do_start) do_start->service_start KEYWORD(restart, COMMAND, 1, do_restart) do_restart->service_start main[for(;;)]->restart_processes->service_for_each_flags->restart_service_if_needed->service_start main[for(;;)]->handle_property_set_fd->handle_control_message->msg_start->service_start main[for(;;)]->handle_keychord->service_start
前三个分支是由处理command是调用的处理函数do_XXX调用的,也就是execute_one_command函数的处理过程会调用到
后三个分支是在init的main函数的循环体中调用
在init.rc中有一句class_start default
作为class_start命令在处理时会调用到do_class_start
int do_class_start(int nargs, char **args) //argc[1]=default
{
service_for_each_class(args[1], service_start_if_not_disabled);
return 0;
}
service_for_each_class根据class类名查找service
void service_for_each_class(const char *classname,void (*func)(struct service *svc))
{
struct listnode *node;
struct service *svc;
list_for_each(node, &service_list) { //遍历全局service_list
svc = node_to_item(node, struct service, slist);
if (!strcmp(svc->classname, classname)) { //在前面parse_service函数中,将svc->classname = "default",所以为真
func(svc); //调用service_start_if_not_disabled
}
}
}
service_start_if_not_disabled启动没有禁止启动的service
static void service_start_if_not_disabled(struct service *svc)
{
if (!(svc->flags & SVC_DISABLED)) { //若没设置SVC_DISABLED标志,也就是init.rc中对应的service的options没有disabled
service_start(svc, NULL); //则会启动服务
}
}
到这里重要的正规的service就已经启动了
5.service_start的简单解析
void service_start(struct service *svc, const char *dynamic_args)
{
struct stat s;
pid_t pid;
int needs_console;
int n;
svc->flags &= (~(SVC_DISABLED|SVC_RESTARTING)); //去掉禁用和重启标志
svc->time_started = 0;
if (svc->flags & SVC_RUNNING) { //若已经运行了,则直接返回
return;
}
needs_console = (svc->flags & SVC_CONSOLE) ? 1 : 0; //需要console
if (needs_console && (!have_console)) { //需要但没有console
ERROR("service '%s' requires console\n", svc->name);
svc->flags |= SVC_DISABLED;
return;
}
if (stat(svc->args[0], &s) != 0) {
ERROR("cannot find '%s', disabling '%s'\n", svc->args[0], svc->name);
svc->flags |= SVC_DISABLED;
return;
}
if ((!(svc->flags & SVC_ONESHOT)) && dynamic_args) { //没one-shot标志但使用了动态参数
ERROR("service '%s' must be one-shot to use dynamic args, disabling\n",svc->args[0]);
svc->flags |= SVC_DISABLED;
return;
}
NOTICE("starting '%s'\n", svc->name); //打印信息
pid = fork(); //创建进程
if (pid == 0) { //子进程
struct socketinfo *si;
struct svcenvinfo *ei;
char tmp[32];
int fd, sz;
if (properties_inited()) {
get_property_workspace(&fd, &sz);
sprintf(tmp, "%d,%d", dup(fd), sz);
add_environment("ANDROID_PROPERTY_WORKSPACE", tmp);
}
for (ei = svc->envvars; ei; ei = ei->next)
add_environment(ei->name, ei->value);
for (si = svc->sockets; si; si = si->next) {
int socket_type = (!strcmp(si->type, "stream") ? SOCK_STREAM :(!strcmp(si->type, "dgram") ? SOCK_DGRAM : SOCK_SEQPACKET));
int s = create_socket(si->name, socket_type,si->perm, si->uid, si->gid);
if (s >= 0) {
publish_socket(si->name, s);
}
}
if (svc->ioprio_class != IoSchedClass_NONE) {
if (android_set_ioprio(getpid(), svc->ioprio_class, svc->ioprio_pri)) {
ERROR("Failed to set pid %d ioprio = %d,%d: %s\n",getpid(), svc->ioprio_class, svc->ioprio_pri, strerror(errno));
}
}
if (needs_console) { //需要控制台
setsid();
open_console(); //打开控制台
} else {
zap_stdio();
}
setpgid(0, getpid());
if (svc->gid) {
setgid(svc->gid);
}
if (svc->nr_supp_gids) {
setgroups(svc->nr_supp_gids, svc->supp_gids);
}
if (svc->uid) {
setuid(svc->uid);
}
if (!dynamic_args) {
if (execve(svc->args[0], (char**) svc->args, (char**) ENV) < 0) {//service 路径参数对应的应用程序
ERROR("cannot execve('%s'): %s\n", svc->args[0], strerror(errno));
}
}
else {
char *arg_ptrs[INIT_PARSER_MAXARGS+1];
int arg_idx = svc->nargs;
char *tmp = strdup(dynamic_args);
char *next = tmp;
char *bword;
/* Copy the static arguments */
memcpy(arg_ptrs, svc->args, (svc->nargs * sizeof(char *)));
while((bword = strsep(&next, " "))) {
arg_ptrs[arg_idx++] = bword;
if (arg_idx == INIT_PARSER_MAXARGS)
break;
}
arg_ptrs[arg_idx] = '\0';
execve(svc->args[0], (char**) arg_ptrs, (char**) ENV); //service 路径参数对应的应用程序
}
_exit(127);
}
if (pid < 0) {
ERROR("failed to start '%s'\n", svc->name);
svc->pid = 0;
return;
}
svc->time_started = gettime(); //记录service启动时间
svc->pid = pid; //记录service的pid号
svc->flags |= SVC_RUNNING; //添加已运行标志SVC_RUNNING
if (properties_inited())
notify_service_state(svc->name, "running");
}
这里execve(svc->args[0], (char**) arg_ptrs, (char**) ENV)中args[0]是init.rc中service <name> <pathname> [ <argument> ]*的<pathname>,
arg_ptrs指向[ <argument> ]*
例如:service servicemanager /system/bin/servicemanager就会执行execve(/system/bin/servicemanager,...........)