seamless_cloning (Possion Image Editing)
opencv3.0 photo 模块加入了seamless_cloning类。该类对应的论文是“Poisson Image Editing”
主要可以实现一下功能:
seamless clone:
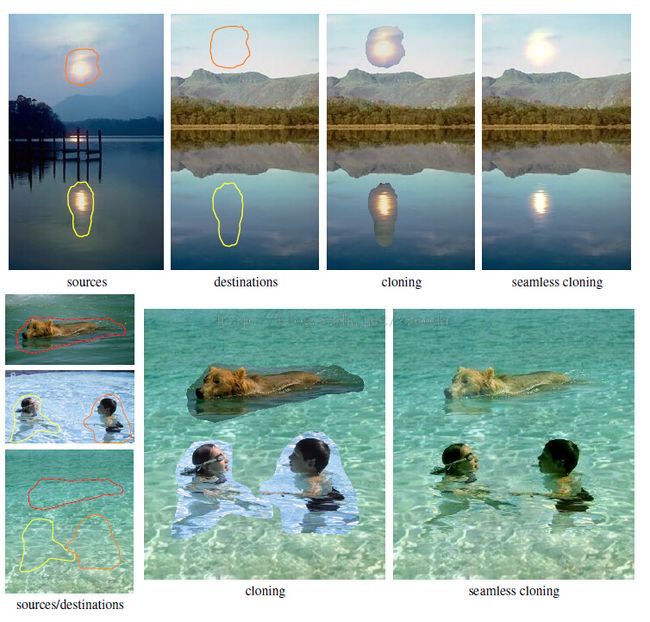
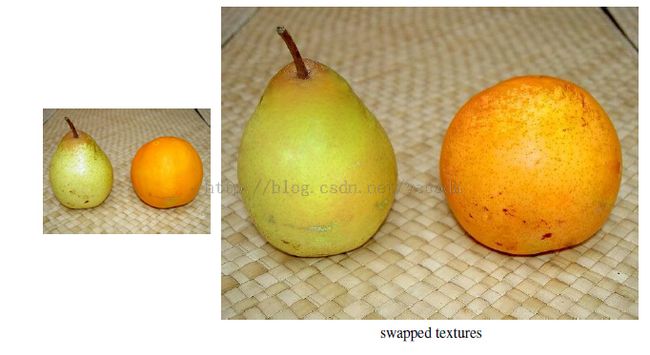
纹理传输:
去除光噪:

等等。
本文主要以normal_clone为例, 从代码层面解释整个流程:
1. 在normal_clone 中需要准备三张图片,分别是source, mask, destination。 如最上面那张图,source就是熊,孩子那些要黏贴的图片,mask是这些前景的mask。 destination是背景,这里是水池。
2. 计算source和destination的x,y方向上的梯度
3. 计算lapx, lapy即对梯度再取梯度。得到lap
4. 取destination中非mask位置和source中mask位置lap,两者拼接得到最终lap
5. 用这个lap和原始图片,解决possion equation, 得到最终结果。(这部分不是很懂)
用到了Discrete sine transform,
参考:http://www.mathworks.com/help/pde/ug/dst.html
http://www.mathworks.com/help/pde/ug/fast-solution-of-poissons-equation.html
注释代码如下:(做了少量修改,与opencv不完全相同)
#ifndef SEAMLESSCLONE_H_H
#define SEAMLESSCLONE_H_H
//#include "precomp.hpp"
//#include "opencv2/photo.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/core/core.hpp"
#include <iostream>
#include <stdlib.h>
#include <complex>
#include "math.h"
using namespace std;
using namespace cv;
namespace customCV {
class Cloning
{
public:
//output: 每个通道的合成结果数组
//rbgx_channel, rgby_channel是gxx, gyy 分通道结果
vector <Mat> rgb_channel, rgbx_channel, rgby_channel, output;
//smask是source图片的mask, smask1是smask取反的结果
//grx, gry 是dst图片的梯度。 grx32, gry32是smask1区域的梯度
//sgx, sgy 是source图片的梯度。 srx32, sry32是smask区域的梯度
Mat grx, gry, sgx, sgy, srx32, sry32, grx32, gry32, smask, smask1;
void init_var(Mat &I, Mat &wmask);
void initialization(Mat &I, Mat &mask, Mat &wmask);
void scalar_product(Mat mat, float r, float g, float b);
void array_product(Mat mat1, Mat mat2, Mat mat3);
void poisson(Mat &I, Mat &gx, Mat &gy, Mat &sx, Mat &sy);
void evaluate(Mat &I, Mat &wmask, Mat &cloned);
void getGradientx(const Mat &img, Mat &gx);
void getGradienty(const Mat &img, Mat &gy);
void lapx(const Mat &img, Mat &gxx);
void lapy(const Mat &img, Mat &gyy);
void dst(double *mod_diff, double *sineTransform, int h, int w);
void idst(double *mod_diff, double *sineTransform, int h, int w);
void transpose(double *mat, double *mat_t, int h, int w);
void solve(const Mat &img, double *mod_diff, Mat &result);
void poisson_solver(const Mat &img, Mat &gxx, Mat &gyy, Mat &result);
void normal_clone(Mat &I, Mat &mask, Mat &wmask, Mat &cloned, int num);
void local_color_change(Mat &I, Mat &mask, Mat &wmask, Mat &cloned, float red_mul, float green_mul, float blue_mul);
void illum_change(Mat &I, Mat &mask, Mat &wmask, Mat &cloned, float alpha, float beta);
void texture_flatten(Mat &I, Mat &mask, Mat &wmask, double low_threshold, double high_threhold, int kernel_size, Mat &cloned);
};
void seamlessClone(InputArray _src, InputArray _dst, InputArray _mask, Point p, OutputArray _blend, int flags);
void colorChange(InputArray _src, InputArray _mask, OutputArray _dst, float r, float g, float b);
void illuminationChange(InputArray _src, InputArray _mask, OutputArray _dst, float a, float b);
void textureFlattening(InputArray _src, InputArray _mask, OutputArray _dst, double low_threshold, double high_threshold, int kernel_size);
}
#endif
//#include "precomp.hpp"
//#include "opencv2/photo.hpp"
#include <stdlib.h>
#include <opencv2/highgui/highgui.hpp>
#include "seamless_cloning.hpp"
using namespace std;
using namespace cv;
namespace customCV {
void Cloning::getGradientx(const Mat &img, Mat &gx)
{
Mat kernel = Mat::zeros(1, 3, CV_8S);
kernel.at<char>(0, 2) = 1;
kernel.at<char>(0, 1) = -1;
filter2D(img, gx, CV_32F, kernel);
}
void Cloning::getGradienty(const Mat &img, Mat &gy)
{
Mat kernel = Mat::zeros(3, 1, CV_8S);
kernel.at<char>(2, 0) = 1;
kernel.at<char>(1, 0) = -1;
filter2D(img, gy, CV_32F, kernel);
}
//img是原始图像水平方向上的梯度。本函数是对梯度再求梯度
void Cloning::lapx(const Mat &img, Mat &gxx)
{
Mat kernel = Mat::zeros(1, 3, CV_8S);
kernel.at<char>(0, 0) = -1;
kernel.at<char>(0, 1) = 1;
filter2D(img, gxx, CV_32F, kernel);
}
void Cloning::lapy(const Mat &img, Mat &gyy)
{
Mat kernel = Mat::zeros(3, 1, CV_8S);
kernel.at<char>(0, 0) = -1;
kernel.at<char>(1, 0) = 1;
filter2D(img, gyy, CV_32F, kernel);
}
//离散正弦变换
//参考:http://www.mathworks.com/help/pde/ug/dst.html
//参考:http://www.mathworks.com/help/pde/ug/fast-solution-of-poissons-equation.html
void Cloning::dst(double *mod_diff, double *sineTransform, int h, int w)
{
unsigned long int idx;
Mat temp = Mat(2 * h + 2, 1, CV_32F);
Mat res = Mat(h, 1, CV_32F);
Mat planes[] = { Mat_<float>(temp), Mat::zeros(temp.size(), CV_32F) };
Mat result;
int p = 0;
for (int i = 0; i < w; i++)
{
temp.at<float>(0, 0) = 0.0;
for (int j = 0, r = 1; j < h; j++, r++)
{
idx = j*w + i;
temp.at<float>(r, 0) = (float)mod_diff[idx];
}
temp.at<float>(h + 1, 0) = 0.0;
for (int j = h - 1, r = h + 2; j >= 0; j--, r++)
{
idx = j*w + i;
temp.at<float>(r, 0) = (float)(-1.0 * mod_diff[idx]);
}
merge(planes, 2, result);
dft(result, result, 0, 0);
Mat planes1[] = { Mat::zeros(result.size(), CV_32F), Mat::zeros(result.size(), CV_32F) };
split(result, planes1);
std::complex<double> two_i = std::sqrt(std::complex<double>(-1));
double factor = -2 * imag(two_i);
for (int c = 1, z = 0; c < h + 1; c++, z++)
{
res.at<float>(z, 0) = (float)(planes1[1].at<float>(c, 0) / factor);
}
for (int q = 0, z = 0; q < h; q++, z++)
{
idx = q*w + p;
sineTransform[idx] = res.at<float>(z, 0);
}
p++;
}
}
void Cloning::idst(double *mod_diff, double *sineTransform, int h, int w)
{
int nn = h + 1;
unsigned long int idx;
dst(mod_diff, sineTransform, h, w);
for (int i = 0; i < h; i++)
for (int j = 0; j < w; j++)
{
idx = i*w + j;
sineTransform[idx] = (double)(2 * sineTransform[idx]) / nn;
}
}
void Cloning::transpose(double *mat, double *mat_t, int h, int w)
{
Mat tmp = Mat(h, w, CV_32FC1);
unsigned long int idx;
for (int i = 0; i < h; i++)
{
for (int j = 0; j < w; j++)
{
idx = i*(w)+j;
tmp.at<float>(i, j) = (float)mat[idx];
}
}
Mat tmp_t = tmp.t();
for (int i = 0; i < tmp_t.size().height; i++)
for (int j = 0; j < tmp_t.size().width; j++)
{
idx = i*tmp_t.size().width + j;
mat_t[idx] = tmp_t.at<float>(i, j);
}
}
void Cloning::solve(const Mat &img, double *mod_diff, Mat &result)
{
int w = img.size().width;
int h = img.size().height;
unsigned long int idx, idx1;
double *sineTransform = new double[(h - 2)*(w - 2)];
double *sineTransform_t = new double[(h - 2)*(w - 2)];
double *denom = new double[(h - 2)*(w - 2)];
double *invsineTransform = new double[(h - 2)*(w - 2)];
double *invsineTransform_t = new double[(h - 2)*(w - 2)];
double *img_d = new double[(h)*(w)];
//结果存在img_d
dst(mod_diff, sineTransform, h - 2, w - 2);
transpose(sineTransform, sineTransform_t, h - 2, w - 2);
dst(sineTransform_t, sineTransform, w - 2, h - 2);
transpose(sineTransform, sineTransform_t, w - 2, h - 2);
int cy = 1;
for (int i = 0; i < w - 2; i++, cy++)
{
for (int j = 0, cx = 1; j < h - 2; j++, cx++)
{
idx = j*(w - 2) + i;
denom[idx] = (float)2 * cos(CV_PI*cy / ((double)(w - 1))) - 2 + 2 * cos(CV_PI*cx / ((double)(h - 1))) - 2;
}
}
for (idx = 0; idx < (unsigned)(w - 2)*(h - 2); idx++)
{
sineTransform_t[idx] = sineTransform_t[idx] / denom[idx];
}
idst(sineTransform_t, invsineTransform, h - 2, w - 2);
transpose(invsineTransform, invsineTransform_t, h - 2, w - 2);
idst(invsineTransform_t, invsineTransform, w - 2, h - 2);
transpose(invsineTransform, invsineTransform_t, w - 2, h - 2);
for (int i = 0; i < h; i++)
{
for (int j = 0; j < w; j++)
{
idx = i*w + j;
img_d[idx] = (double)img.at<uchar>(i, j);
}
}
for (int i = 1; i < h - 1; i++)
{
for (int j = 1; j < w - 1; j++)
{
idx = i*w + j;
img_d[idx] = 0.0;
}
}
for (int i = 1, id1 = 0; i < h - 1; i++, id1++)
{
for (int j = 1, id2 = 0; j < w - 1; j++, id2++)
{
idx = i*w + j;
idx1 = id1*(w - 2) + id2;
img_d[idx] = invsineTransform_t[idx1];
}
}
for (int i = 0; i < h; i++)
{
for (int j = 0; j < w; j++)
{
idx = i*w + j;
if (img_d[idx] < 0.0) {
result.at<uchar>(i, j) = 0;
}
else if (img_d[idx] > 255.0)
result.at<uchar>(i, j) = 255;
else {
result.at<uchar>(i, j) = (uchar)img_d[idx];
}
}
}
delete[] sineTransform;
delete[] sineTransform_t;
delete[] denom;
delete[] invsineTransform;
delete[] invsineTransform_t;
delete[] img_d;
}
//由img和lap计算合成结果, 注意实际上lap有大量负数
void Cloning::poisson_solver(const Mat &img, Mat &gxx, Mat &gyy, Mat &result)
{
int w = img.size().width;
int h = img.size().height;
unsigned long int idx;
Mat lap = Mat(img.size(), CV_32FC1);
lap = gxx + gyy;
Mat bound = img.clone();
//rectangle 外围保持原样,rect内部变为scalar
rectangle(bound, Point(1, 1), Point(img.cols - 2, img.rows - 2), Scalar::all(0), -1);
//rectangle(bound, Point(20, 20), Point(img.cols - 50, img.rows - 50), Scalar::all(0), -1);
double *boundary_point = new double[h*w];
Mat bound_map = cv::Mat(img.size(), CV_8UC1, cv::Scalar(0));
for (int i = 1; i < h - 1; i++)
for (int j = 1; j < w - 1; j++)
{
idx = i*w + j;
boundary_point[idx] = -4 * (int)bound.at<uchar>(i, j) + (int)bound.at<uchar>(i, (j + 1)) + (int)bound.at<uchar>(i, (j - 1))
+ (int)bound.at<uchar>(i - 1, j) + (int)bound.at<uchar>(i + 1, j);
bound_map.at<uchar>(i, j) = boundary_point[idx];
}
Mat diff = Mat(h, w, CV_32FC1);
for (int i = 0; i < h; i++)
{
for (int j = 0; j < w; j++)
{
idx = i*w + j;
diff.at<float>(i, j) = (float)(lap.at<float>(i, j) - boundary_point[idx]);
}
}
//diff和lap几乎没什么区别
double *mod_diff = new double[(h - 2)*(w - 2)];
for (int i = 0; i < h - 2; i++)
{
for (int j = 0; j < w - 2; j++)
{
idx = i*(w - 2) + j;
mod_diff[idx] = diff.at<float>(i + 1, j + 1);
}
}
///////////////////////////////////////////////////// Find DST /////////////////////////////////////////////////////
solve(img, mod_diff, result);
delete[] mod_diff;
delete[] boundary_point;
}
void Cloning::init_var(Mat &I, Mat &wmask)
{
grx = Mat(I.size(), CV_32FC3);
gry = Mat(I.size(), CV_32FC3);
sgx = Mat(I.size(), CV_32FC3);
sgy = Mat(I.size(), CV_32FC3);
split(I, rgb_channel);
smask = Mat(wmask.size(), CV_32FC1);
srx32 = Mat(I.size(), CV_32FC3);
sry32 = Mat(I.size(), CV_32FC3);
smask1 = Mat(wmask.size(), CV_32FC1);
grx32 = Mat(I.size(), CV_32FC3);
gry32 = Mat(I.size(), CV_32FC3);
}
void Cloning::initialization(Mat &I, Mat &mask, Mat &wmask)
{
//初始化各个mat
init_var(I, wmask);
//grx, gry 分别表示dest的x,y方向的梯度
getGradientx(I, grx);
getGradienty(I, gry);
//sgx, sgy 分别表示在mask区域内的source图片在x,y方向的梯度
getGradientx(mask, sgx);
getGradienty(mask, sgy);
Mat Kernel(Size(3, 3), CV_8UC1);
Kernel.setTo(Scalar(1));
//腐蚀
erode(wmask, wmask, Kernel, Point(-1, -1), 3);
wmask.convertTo(smask, CV_32FC1, 1.0 / 255.0);
I.convertTo(srx32, CV_32FC3, 1.0 / 255.0);
I.convertTo(sry32, CV_32FC3, 1.0 / 255.0);
}
void Cloning::scalar_product(Mat mat, float r, float g, float b)
{
vector <Mat> channels;
split(mat, channels);
multiply(channels[2], r, channels[2]);
multiply(channels[1], g, channels[1]);
multiply(channels[0], b, channels[0]);
merge(channels, mat);
}
//mat1 = mat3.mul(mat2(:)) mat3为单通道,一般为mask
void Cloning::array_product(Mat mat1, Mat mat2, Mat mat3)
{
vector <Mat> channels_temp1;
vector <Mat> channels_temp2;
split(mat1, channels_temp1);
split(mat2, channels_temp2);
multiply(channels_temp2[2], mat3, channels_temp1[2]);
multiply(channels_temp2[1], mat3, channels_temp1[1]);
multiply(channels_temp2[0], mat3, channels_temp1[0]);
merge(channels_temp1, mat1);
}
void Cloning::poisson(Mat &I, Mat &gx, Mat &gy, Mat &sx, Mat &sy)
{
//fx, fy是两者组合的梯度
Mat fx = Mat(I.size(), CV_32FC3);
Mat fy = Mat(I.size(), CV_32FC3);
fx = gx + sx;
fy = gy + sy;
Mat gxx = Mat(I.size(), CV_32FC3);
Mat gyy = Mat(I.size(), CV_32FC3);
//gxx, gyy 是在x,y方向的laplacian算子
lapx(fx, gxx);
lapy(fy, gyy);
split(gxx, rgbx_channel);
split(gyy, rgby_channel);
split(I, output);
poisson_solver(rgb_channel[2], rgbx_channel[2], rgby_channel[2], output[2]);
poisson_solver(rgb_channel[1], rgbx_channel[1], rgby_channel[1], output[1]);
poisson_solver(rgb_channel[0], rgbx_channel[0], rgby_channel[0], output[0]);
}
void Cloning::evaluate(Mat &I, Mat &wmask, Mat &cloned)
{
//mask取反
bitwise_not(wmask, wmask);
wmask.convertTo(smask1, CV_32FC1, 1.0 / 255.0);
I.convertTo(grx32, CV_32FC3, 1.0 / 255.0);
I.convertTo(gry32, CV_32FC3, 1.0 / 255.0);
array_product(grx32, grx, smask1);
array_product(gry32, gry, smask1);
poisson(I, grx32, gry32, srx32, sry32);
merge(output, cloned);
}
void Cloning::normal_clone(Mat &I, Mat &mask, Mat &wmask, Mat &cloned, int num)
{
int w = I.size().width;
int h = I.size().height;
int channel = I.channels();
//初始化各个存储参数的mat,并计算原图于目标图的x,y方向梯度,对mask腐蚀
initialization(I, mask, wmask);
if (num == 1) //NORMAL_CLONE
{
//srx32, sry32是sgx,sgy的mask区域
array_product(srx32, sgx, smask);
array_product(sry32, sgy, smask);
}
else if (num == 2) //MIXED_CLONE
{
for (int i = 0; i < h; i++)
{
for (int j = 0; j < w; j++)
{
for (int c = 0; c<channel; ++c)
{
if (abs(sgx.at<float>(i, j*channel + c) - sgy.at<float>(i, j*channel + c)) >
abs(grx.at<float>(i, j*channel + c) - gry.at<float>(i, j*channel + c)))
{
srx32.at<float>(i, j*channel + c) = sgx.at<float>(i, j*channel + c)
* smask.at<float>(i, j);
sry32.at<float>(i, j*channel + c) = sgy.at<float>(i, j*channel + c)
* smask.at<float>(i, j);
}
else
{
srx32.at<float>(i, j*channel + c) = grx.at<float>(i, j*channel + c)
* smask.at<float>(i, j);
sry32.at<float>(i, j*channel + c) = gry.at<float>(i, j*channel + c)
* smask.at<float>(i, j);
}
}
}
}
}
else if (num == 3) //FEATURE_EXCHANGE
{
Mat gray = Mat(mask.size(), CV_8UC1);
Mat gray8 = Mat(mask.size(), CV_8UC3);
cvtColor(mask, gray, COLOR_BGR2GRAY);
vector <Mat> temp;
split(I, temp);
gray.copyTo(temp[2]);
gray.copyTo(temp[1]);
gray.copyTo(temp[0]);
merge(temp, gray8);
getGradientx(gray8, sgx);
getGradienty(gray8, sgy);
array_product(srx32, sgx, smask);
array_product(sry32, sgy, smask);
}
evaluate(I, wmask, cloned);
}
void Cloning::local_color_change(Mat &I, Mat &mask, Mat &wmask, Mat &cloned, float red_mul = 1.0,
float green_mul = 1.0, float blue_mul = 1.0)
{
initialization(I, mask, wmask);
array_product(srx32, sgx, smask);
array_product(sry32, sgy, smask);
scalar_product(srx32, red_mul, green_mul, blue_mul);
scalar_product(sry32, red_mul, green_mul, blue_mul);
evaluate(I, wmask, cloned);
}
void Cloning::illum_change(Mat &I, Mat &mask, Mat &wmask, Mat &cloned, float alpha, float beta)
{
initialization(I, mask, wmask);
array_product(srx32, sgx, smask);
array_product(sry32, sgy, smask);
Mat mag = Mat(I.size(), CV_32FC3);
magnitude(srx32, sry32, mag);
//opencv3.0 alpha中有bug,需要加入一下代码才不能得到正确结果。已经提交bug
for (int i = 0; i < mag.cols; i++)
{
for (int j = 0; j < mag.rows; j++)
{
if (mag.at<cv::Vec3f>(j, i)[0] == 0)
mag.at<cv::Vec3f>(j, i)[0] = 1e-8;
if (mag.at<cv::Vec3f>(j, i)[1] == 0)
mag.at<cv::Vec3f>(j, i)[1] = 1e-8;
if (mag.at<cv::Vec3f>(j, i)[2] == 0)
mag.at<cv::Vec3f>(j, i)[2] = 1e-8;
}
}
Mat multX, multY, multx_temp, multy_temp;
multiply(srx32, pow(alpha, beta), multX);
pow(mag, -1 * beta, multx_temp);
multiply(multX, multx_temp, srx32);
multiply(sry32, pow(alpha, beta), multY);
pow(mag, -1 * beta, multy_temp);
multiply(multY, multy_temp, sry32);
Mat zeroMask = (srx32 != 0);
srx32.copyTo(srx32, zeroMask);
sry32.copyTo(sry32, zeroMask);
evaluate(I, wmask, cloned);
}
void Cloning::texture_flatten(Mat &I, Mat &mask, Mat &wmask, double low_threshold,
double high_threshold, int kernel_size, Mat &cloned)
{
initialization(I, mask, wmask);
Mat out = Mat(mask.size(), CV_8UC1);
Canny(mask, out, low_threshold, high_threshold, kernel_size);
Mat zeros(sgx.size(), CV_32FC3);
zeros.setTo(0);
Mat zerosMask = (out != 255);
zeros.copyTo(sgx, zerosMask);
zeros.copyTo(sgy, zerosMask);
array_product(srx32, sgx, smask);
array_product(sry32, sgy, smask);
evaluate(I, wmask, cloned);
}
void seamlessClone(InputArray _src, InputArray _dst, InputArray _mask, Point p, OutputArray _blend, int flags)
{
Mat src = _src.getMat();
Mat dest = _dst.getMat();
Mat mask = _mask.getMat();
_blend.create(dest.size(), CV_8UC3);
Mat blend = _blend.getMat();
int minx = INT_MAX, miny = INT_MAX, maxx = INT_MIN, maxy = INT_MIN;
int h = mask.size().height;
int w = mask.size().width;
Mat gray = Mat(mask.size(), CV_8UC1);
Mat dst_mask = Mat::zeros(dest.size(), CV_8UC1);
Mat cs_mask = Mat::zeros(src.size(), CV_8UC3);
Mat cd_mask = Mat::zeros(dest.size(), CV_8UC3);
if (mask.channels() == 3)
cvtColor(mask, gray, COLOR_BGR2GRAY);
else
gray = mask;
for (int i = 0; i < h; i++)
{
for (int j = 0; j < w; j++)
{
if (gray.at<uchar>(i, j) == 255)
{
minx = std::min(minx, i);
maxx = std::max(maxx, i);
miny = std::min(miny, j);
maxy = std::max(maxy, j);
}
}
}
int lenx = maxx - minx;
int leny = maxy - miny;
int minxd = p.y - lenx / 2;
int maxxd = p.y + lenx / 2;
int minyd = p.x - leny / 2;
int maxyd = p.x + leny / 2;
CV_Assert(minxd >= 0 && minyd >= 0 && maxxd <= dest.rows && maxyd <= dest.cols);
Rect roi_d(minyd, minxd, leny, lenx);
Rect roi_s(miny, minx, leny, lenx);
Mat destinationROI = dst_mask(roi_d);
Mat sourceROI = cs_mask(roi_s);
gray(roi_s).copyTo(destinationROI);
src(roi_s).copyTo(sourceROI, gray(roi_s));
destinationROI = cd_mask(roi_d);
cs_mask(roi_s).copyTo(destinationROI);
Cloning obj;
obj.normal_clone(dest, cd_mask, dst_mask, blend, flags);
}
void colorChange(InputArray _src, InputArray _mask, OutputArray _dst, float r, float g, float b)
{
Mat src = _src.getMat();
Mat mask = _mask.getMat();
_dst.create(src.size(), src.type());
Mat blend = _dst.getMat();
float red = r;
float green = g;
float blue = b;
Mat gray = Mat::zeros(mask.size(), CV_8UC1);
if (mask.channels() == 3)
cvtColor(mask, gray, COLOR_BGR2GRAY);
else
gray = mask;
Mat cs_mask = Mat::zeros(src.size(), CV_8UC3);
src.copyTo(cs_mask, gray);
Cloning obj;
obj.local_color_change(src, cs_mask, gray, blend, red, green, blue);
}
void illuminationChange(InputArray _src, InputArray _mask, OutputArray _dst, float a, float b)
{
Mat src = _src.getMat();
Mat mask = _mask.getMat();
_dst.create(src.size(), src.type());
Mat blend = _dst.getMat();
float alpha = a;
float beta = b;
Mat gray = Mat::zeros(mask.size(), CV_8UC1);
if (mask.channels() == 3)
cvtColor(mask, gray, COLOR_BGR2GRAY);
else
gray = mask;
Mat cs_mask = Mat::zeros(src.size(), CV_8UC3);
src.copyTo(cs_mask, gray);
Cloning obj;
obj.illum_change(src, cs_mask, gray, blend, alpha, beta);
}
void textureFlattening(InputArray _src, InputArray _mask, OutputArray _dst,
double low_threshold, double high_threshold, int kernel_size)
{
Mat src = _src.getMat();
Mat mask = _mask.getMat();
_dst.create(src.size(), src.type());
Mat blend = _dst.getMat();
Mat gray = Mat::zeros(mask.size(), CV_8UC1);
if (mask.channels() == 3)
cvtColor(mask, gray, COLOR_BGR2GRAY);
else
gray = mask;
Mat cs_mask = Mat::zeros(src.size(), CV_8UC3);
src.copyTo(cs_mask, gray);
Cloning obj;
obj.texture_flatten(src, cs_mask, gray, low_threshold, high_threshold, kernel_size, blend);
}
}