linux中断响应和处理过程分析
|
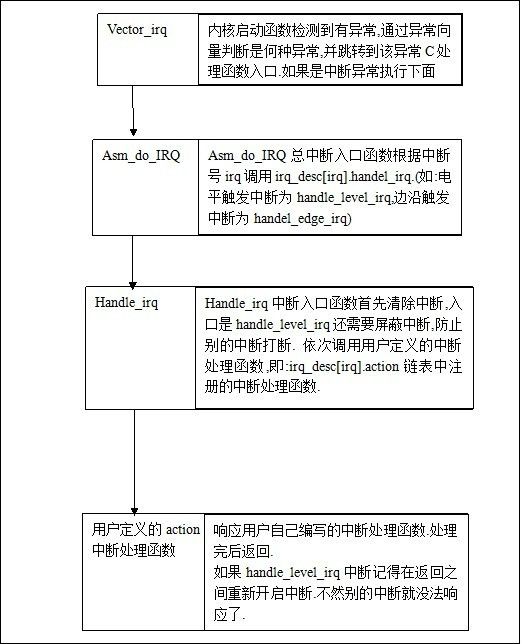
linux中断响应和处理过程: 首先中断属于异常的一种。异常,就是可以打断CPU正常运行流程的一些事情,比如说外部中断,未定义的指定,试图修改只读数据,执行SWI指定(software interrupt instructin,软件中断指令,比如说上层调用sys_read,sys_write就会产生swi)等。 内核启动时在start_kernel函数(init/main.c)中调用trap_init , init_IRQ两个函数来设置异常的处理函数。 trap_init函数(arch/arm/kernel/traps.c) void_init trap_init(void) { ...... memcpy((void *)vectors, __vectors_start, __vectors_end - __vectors_start); memcpy((void *)vectors + 0x200, __stubs_start, __stubs_end - __stubs_start); ....... } 上面两条定义的是异常向量的存放地方,即:__stubs_start~~~~~ __stubs_end之间就是异常向量. 接下来 我们看异常向量之间的定义:(arch/arm/kernel/entry-armv.s) .equ stubs_offset, __vectors_start + 0x200 - __stubs_start .globl __vectors_start __vectors_start: ARM( swi SYS_ERROR0 ) //复位时.CPU交执行这条指令 THUMB( svc #0 ) THUMB( nop ) W(b) vector_und + stubs_offset //未定义异常时,CPU将执行这条跳转指令 W(ldr) pc, .LCvswi + stubs_offset //swi异常 W(b) vector_pabt + stubs_offset //指令预取止 W(b) vector_dabt + stubs_offset //数据访问中止 W(b) vector_addrexcptn + stubs_offset //没有用到 W(b) vector_irq + stubs_offset //irq中断 W(b) vector_fiq + stubs_offset //fig中断 (快速中断)
.globl __vectors_end __vectors_end:
各种异常的处理函数可以分为五类,分别分布在下面不同的文件中: 1、arch/arm/kernel/traps.c中 处理未定义指令异常,总入口函数为do_undefinstr 2、arch/arm/mm/fault.c 与内存访问相关的异常,总入口函数为do_DataAbort, do_PretftchAbort 3. arch/arm/arm/irq.c 中断处理函数在这个文件中定义,总入口函数为asm_do_IRQ 4. arch/arm/kernel/call.s swi异常处理 比如说:sys_read, sys_open等. 5. 没有使用的异常 除了IRQ中断外(FIG中断linux一般不使用),所有的异常内核都定义了细致而完备的处理函数. 所以我们这里关心的也只是上面红色部分,即:IRQ中断. Init_IRQ函数(arch/arm/kernel/irq.c),被用来初使化中断的处理框架,设置各种中断的默认处理函数. Linux内核将所有中断统一编号,使用irq_desc结构来描述中断:每个数组项对应一个中断(也可能是一组中断,它们使用共同的中断号),里面记录了中断的名称,中断状态,中断标记,并提供硬件访问函数(清除,屏蔽,使能中断),提供了这个中断的处理函数的入口,通过它可以调用用户注册的中断处理函数 include/linux/irq.h {......... irq_flow_handler_t handle_irq; //当前的中断处理函数入口 struct irq_chip *chip; //底层的硬件访问 .......... struct irqaction *action; //用户提供的中断处理函数链表 unsigned int status; //IRQ状态 ........... const char *name; //中断名称 } ____cacheline_internodealigned_in_smp;
Handle_irq是这个或者这组中断的处理函数入口. 当中断发生时总中断入口函数asm_do_IRQ将根据中断号调用相应irq_desc数组中的handle_irq函数,handle_irq使用chip结构中的函数来清除,屏蔽,使用中断,还会一一调用用户在action链表中注册的中断处理函数. Struct irq_chip{ const char *name; //启动中断,如果不设置,缺省为"enable" unsigned int (*startup)(unsigned int irq); //启动中断,如果不设置,缺省为"enable" void (*shutdown)(unsigned int irq); //关闭中断,如果不设置,缺省为"disable" void (*enable)(unsigned int irq); //使能中断,如果不设置,缺省为unmask void (*disable)(unsigned int irq); //禁止中断如果不设置,缺省为"mask"
void (*ack)(unsigned int irq); //响应中断,通常是清除当前中断使得可以接收下一个中断 void (*mask)(unsigned int irq); //屏蔽中断源 void (*mask_ack)(unsigned int irq); //屏蔽和响应中断 void (*unmask)(unsigned int irq); //开启中断源 .......... }
struct irqaction *action; 结构类型在include/linux/interrupt..h中定义. 用户注册的每一个中断处理函数都用一个irqaction结构表示,一个中断(比如共享中断)可以有多个处理函数,它们的irqacion结构链接成一个链表,以action为表头. struct irqaction { irq_handler_t handler; //用户注册的中断处理函数 unsigned long flags;//中断标志,比如是否为共享中断,电平触发还是边沿触发 const char *name; //用户注册的中断名字 void *dev_id; //用户供给的handle参数,还可以区分共享中断 struct irqaction *next; int irq; //中断号 struct proc_dir_entry *dir; irq_handler_t thread_fn; struct task_struct *thread; unsigned long thread_flags; };
Irq_desc结构数组中: "irq_flow_handler_thandle_irq" , "struct irq_chip *chip " , "struct ,irqaction *action"这三种数据结构构成了中断处理体系结构.
很明显,中断需要用户处理的只有最后一步,就是用户的action中断处理函数. 所以我们需要告诉内核我们相应的中断处理函数在哪里,中断注册:reguest_irq, 相对应的中断卸载: free_irq.
int request_irq(unsigned int irq, //中申请中断的中断号,可以根据不用的引脚到irqs.h里面查找 //同一中断的不同处理函数必须用dev_id来区分, //共享中断之间既可使用同一中断处理函数,也可使用不同中断处理函数,都需要dev_id区分. 中断注册做了三件事: 1.提供用户action中断处理函数链接 2.中断触发方式是什么 3.中断使能
Void free_irq(unsigned int irq, //中断号与注册时对应 void *dev_id) //共享中断时用于区分不同硬件与注册时对应 中断卸载和注册相反: 1.根据中断号irq,dev_id从action链表中找到表项,将它删除 2.如果它是唯一表项,还要调用IRQ_DESC[IRQ].CHIP->SHUTDOWN或DESC[IRQ].CHIP->DISABLE来关闭中断.
所以很显然,用户要自己写一个中断程序,只需要实现三步, 1.向内核申请注册中断 2.实现用户中断处理函数 3.在不需要该中断的时候卸载中断
附上一个例子:按键的中断程序 驱动程序: #include <linux/module.h> #include <linux/kernel.h> #include <linux/fs.h> #include <linux/init.h> #include <linux/delay.h> #include <asm/irq.h> #include <linux/interrupt.h> #include <asm/uaccess.h> #include <asm/arch/regs-gpio.h> #include <asm/hardware.h>
#define DEVICE_NAME "buttons" /* 加载模式后,执行”cat /proc/devices”命令看到的设备名称 */ #define BUTTON_MAJOR 232 /* 主设备号 */
struct button_irq_desc { int irq; unsigned long flags; char *name; };
/* 用来指定按键所用的外部中断引脚及中断触发方式, 名字 */ static struct button_irq_desc button_irqs [] = { {IRQ_EINT19, IRQF_TRIGGER_FALLING, "KEY1"}, /* K1 */ {IRQ_EINT11, IRQF_TRIGGER_FALLING, "KEY2"}, /* K2 */ {IRQ_EINT2, IRQF_TRIGGER_FALLING, "KEY3"}, /* K3 */ {IRQ_EINT0, IRQF_TRIGGER_FALLING, "KEY4"}, /* K4 */ };
/* 按键被按下的次数(准确地说,是发生中断的次数) */ static volatile int press_cnt [] = {0, 0, 0, 0};
/* 等待队列: * 当没有按键被按下时,如果有进程调用s3c24xx_buttons_read函数, * 它将休眠 */ static DECLARE_WAIT_QUEUE_HEAD(button_waitq);
/* 中断事件标志, 中断服务程序将它置1,s3c24xx_buttons_read将它清0 */ static volatile int ev_press = 0;
static irqreturn_t buttons_interrupt(int irq, void *dev_id) { volatile int *press_cnt = (volatile int *)dev_id;
*press_cnt = *press_cnt + 1; /* 按键计数加1 */ ev_press = 1; /* 表示中断发生了 */ wake_up_interruptible(&button_waitq); /* 唤醒休眠的进程 */
return IRQ_RETVAL(IRQ_HANDLED); }
/* 应用程序对设备文件/dev/buttons执行open(...)时, * 就会调用s3c24xx_buttons_open函数 */ static int s3c24xx_buttons_open(struct inode *inode, struct file *file) { int i; int err;
for (i = 0; i < sizeof(button_irqs)/sizeof(button_irqs[0]); i++) { // 注册中断处理函数 err = request_irq(button_irqs[i].irq, buttons_interrupt, button_irqs[i].flags, button_irqs[i].name, (void *)&press_cnt[i]); if (err) break; }
if (err) { // 释放已经注册的中断 i--; for (; i >= 0; i--) free_irq(button_irqs[i].irq, (void *)&press_cnt[i]); return -EBUSY; }
return 0; }
/* 应用程序对设备文件/dev/buttons执行close(...)时, * 就会调用s3c24xx_buttons_close函数 */ static int s3c24xx_buttons_close(struct inode *inode, struct file *file) { int i;
for (i = 0; i < sizeof(button_irqs)/sizeof(button_irqs[0]); i++) { // 释放已经注册的中断 free_irq(button_irqs[i].irq, (void *)&press_cnt[i]); }
return 0; }
/* 应用程序对设备文件/dev/buttons执行read(...)时, * 就会调用s3c24xx_buttons_read函数 */ static int s3c24xx_buttons_read(struct file *filp, char __user *buff, size_t count, loff_t *offp) { unsigned long err;
/* 如果ev_press等于0,休眠 */ wait_event_interruptible(button_waitq, ev_press);
/* 执行到这里时,ev_press等于1,将它清0 */ ev_press = 0;
/* 将按键状态复制给用户,并清0 */ err = copy_to_user(buff, (const void *)press_cnt, min(sizeof(press_cnt), count)); memset((void *)press_cnt, 0, sizeof(press_cnt));
return err ? -EFAULT : 0; }
/* 这个结构是字符设备驱动程序的核心 * 当应用程序操作设备文件时所调用的open、read、write等函数, * 最终会调用这个结构中的对应函数 */ static struct file_operations s3c24xx_buttons_fops = { .owner = THIS_MODULE, /* 这是一个宏,指向编译模块时自动创建的__this_module变量 */ .open = s3c24xx_buttons_open, .release = s3c24xx_buttons_close, .read = s3c24xx_buttons_read, };
/* * 执行“insmod s3c24xx_buttons.ko”命令时就会调用这个函数 */ static int __init s3c24xx_buttons_init(void) { int ret;
/* 注册字符设备驱动程序 * 参数为主设备号、设备名字、file_operations结构; * 这样,主设备号就和具体的file_operations结构联系起来了, * 操作主设备为BUTTON_MAJOR的设备文件时,就会调用s3c24xx_buttons_fops中的相关成员函数 * BUTTON_MAJOR可以设为0,表示由内核自动分配主设备号 */ ret = register_chrdev(BUTTON_MAJOR, DEVICE_NAME, &s3c24xx_buttons_fops); if (ret < 0) { printk(DEVICE_NAME " can't register major number\n"); return ret; }
printk(DEVICE_NAME " initialized\n"); return 0; }
/* * 执行”rmmod s3c24xx_buttons.ko”命令时就会调用这个函数 */ static void __exit s3c24xx_buttons_exit(void) { /* 卸载驱动程序 */ unregister_chrdev(BUTTON_MAJOR, DEVICE_NAME); }
/* 这两行指定驱动程序的初始化函数和卸载函数 */ module_init(s3c24xx_buttons_init); module_exit(s3c24xx_buttons_exit);
/* 描述驱动程序的一些信息,不是必须的 */ MODULE_AUTHOR("http://www.100ask.net"); // 驱动程序的作者 MODULE_DESCRIPTION("S3C2410/S3C2440 BUTTON Driver"); // 一些描述信息 MODULE_LICENSE("GPL"); // 遵循的协议///
应用调用程序: #include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <sys/ioctl.h>
int main(int argc, char **argv) { int i; int ret; int fd; int press_cnt[4];
fd = open("/dev/buttons", 0); // 打开设备 if (fd < 0) { printf("Can't open /dev/buttons\n"); return -1; }
// 这是个无限循环,进程有可能在read函数中休眠,当有按键被按下时,它才返回 while (1) { // 读出按键被按下的次数 ret = read(fd, press_cnt, sizeof(press_cnt)); if (ret < 0) { printf("read err!\n"); continue; }
for (i = 0; i < sizeof(press_cnt)/sizeof(press_cnt[0]); i++) { // 如果被按下的次数不为0,打印出来 if (press_cnt[i]) printf("K%d has been pressed %d times!\n", i+1, press_cnt[i]); } }
close(fd); return 0; } |