关于编码器
摘自:http://www.gongkong.com/forum/ForumTopic.aspx?Id=2009041308101800003
http://www.chinakong.com/forum/disp.asp?id=63611
旋转编码器的分辨率与精度
此文原为MM现代制造3月份编码器专辑的投稿,因我交稿晚了,没赶上,现发在这里与网友交流讨论。上海精浦机电有限公司 裘奋 2009年3月
转载请注明出处,作者文责自负.
关于传感器的分辨率与精度的理解,可以用我们所用的机械三指针式手表打这样一个比喻:时针的分辨率是小时,分针的分辨率是分,秒针的分辨率是秒,眼睛反应快的,通过秒针在秒间的空格,我们甚至能分辨至约0.3秒,这是三针式机械指针手表都可以做到的;而精度是什么,就是每个手表对标准时间的准确性,这是每个手表都不同的,或者在使用的不同时间里都不同的(越走越快的或越走越慢的),大致在1秒至30秒之间。
同样的,在旋转编码器的使用中,分辨率与精度是完全不同的两个概念。
编码器的分辨率,是指编码器可读取并输出的最小角度变化,对应的参数有:每转刻线数(line)、每转脉冲数(PPR)、最小步距(Step)、位(Bit)等。
编码器的精度,是指编码器输出的信号数据对测量的真实角度的准确度,对应的参数是角分(′)、角秒(″)。
分辨率:线(line),就是编码器的码盘的光学刻线,如果编码器是直接方波输出的,它就是每转脉冲数(PPR)了(图1), 但如果是正余弦(sin/cos)信号输出的,是可以通过信号模拟量变化电子细分,获得更多的方波脉冲PPR输出(图2),编码器的方波输出有A相与B相,A相与B相差1/4个脉冲周期,通过上升沿与下降沿的判断,就可以获得1/4脉冲周期的变化步距(4倍频),这就是最小测量步距(Step)了,所以,严格地讲,最小测量步距就是编码器的分辨率。

如果是德国海德汉的 ROD486的3600线的正余弦信号输出,可进行25倍的电子细分,获得90000的脉冲(ppr),0.004度的脉冲周期,通过A/B相的四倍频,可获得0.001度最小测量步距的分辨率,而海德汉提供的原始编码器的精度还是18角秒(0.005度),(不含细分误差)。 分辨率数值小于精度数值。
在以通讯数据输出型的编码器或绝对值编码器,其输出的分辨率是以多少“位”来表达,即2的幂次方的圆周分割度。
所以,旋转编码器的分辨率可以用“线line",每转脉冲数PPR,或“步距Step”分别来表述。用线来表述,可能还可以再细分的,而有一些“17位”的编码器,实际是针对步距的,已经细分好了的。 一个3600线的编码器,分辨率也完全有可能优于一个“17位”的已经细分好的编码器。
旋转编码器的精度,以角分、角秒为单位,与分辨率有一点关系,又不是全部,例如仍以德国海德汉的ROD400系列为例,其5000线以下的,海德汉提供的刻线精度为刻线宽度的1/20(与分辨率相关),6000-10000线的,精度为12角秒(与分辨率无关)。而海德汉的RON系列角度编码器,同样的是9000线—36000线,其RON200系列的精度是2.5~5角秒,RON700系列的是2角秒,RON800系列的是1角秒,RON900系列的是0.4角秒,都不由分辨率决定。实际上,影响编码器精度的有以下4个部分:
A:光学部分
B:机械部分
C:电气部分
D:使用中的安装与传输接收部分,使用后的精度下降,机械部分自身的偏差。
A编码器光学部分对精度的影响:
光学码盘—主要的是母板精度、每转刻线数、刻线精度、刻线宽度一致性、边缘精整性等。
光发射源—光的平行与一致性、光衰减。
光接收单元—读取夹角、读取响应。
光学系统使用后的影响—污染,衰减。
例如光学码盘,首先是母板的刻线精度,海德汉的母板是全世界公认第一的,据说其是在地下几十米双悬浮工作室内加工的,对于外界各种因素的影响减小到最小,甚至要考虑到海浪的次声波和远处汽车引擎的振动,为此,很多编码器厂家甚至向海德汉购买母板。其次,加工的过程,光学成像的时间,温度,物理化学的变化,污染等,都会影响到码盘刻线的宽度和边缘性。所以,即使是一样的码盘刻线数,各家能做到的精度也是不同的。
B编码器机械部分对精度的影响:
轴的加工精度与安装精度。
轴承的精度与结构精度。
码盘安装的同心度,光学组建安装的精度。
安装定位点与轴的同心度。
例如,就轴承的结构而言,单轴承支撑结构的轴承偏差无法消除,而且经使用后偏差会更大,而双轴承结构或多支承结构,可有效降低单个轴承的偏差。
C编码器电气部分对精度的影响:
电源的稳定精度—对光发射源与接收单元的影响。
读取响应与电气处理电路带来的误差;
电气噪音影响,取决于编码器电气系统的抗干扰能力;
例如,如果电子细分,也会带来的误差,按照德国海德汉提供的介绍,海德汉编码器的细分电气误差与正余弦曲线的误差约在原始刻线宽度的1%左右。
D编码器使用中带来的精度影响:
安装时与测量转轴连接的同心度;
输出电缆的抗干扰与信号延迟(较长距离或较快频率下);
接收设备的响应与接收设备内部处理可能的误差。
编码器高速旋转时的动态响应偏差。
最常见的就是我们自己使用安装的方法与安装结果带来的偏差。
增量编码器码盘是由很多光栅刻线组成的,有两个(或4个,以后讨论4个光眼的)光眼读取A,B信号的,刻线的密度决定了这个增量型编码器的分辨率,也就是可以分辨读取的最小变化角度值。代表增量编码器的分辨率的参数是PPR,也就是每转脉冲数,例如每圈刻线360线,A,B每圈各输出360个脉冲,分辨率参数就是360PPR。那么这个编码器可分辨的最小角度变化量是多少度呢?就是1度吗?
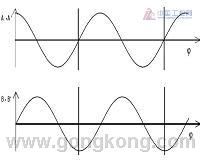
增量编码器的A/B输出的波形一般有两种,一种是有陡直上升沿和陡直下降沿的方波信号,一种是缓慢上升与下降,波形类似正弦曲线的Sin/Cos曲线波形信号输出,A与B相差1/4T周期90度相位,如果A是类正弦Sin曲线,那B就是类余弦Cos曲线。
对于方波信号,A,B两相相差90度相(1/4T),这样,在0度相位角,90度,180度,270度相位角,这四个位置有上升沿和下降沿,这样,实际上在1/4T方波周期就可以有角度变化的判断,这样1/4的T周期就是最小测量步距,通过电路对于这些上升沿与下降沿的判断,可以4倍于PPR读取角度的变化,这就是方波的四倍频。这种判断,也可以用逻辑来做,0代表低,1代表高,A/B两相在一个周期内变化是0 0,0 1,1 1,1 0 。这种判断不仅可以4倍频,还可以判断旋转方向。
那么,方波信号的最小分辨角度=360度/(4xPPR)。
前面的问题:一个方波A/B输出360PPR的增量编码器,最小分辨角度=0.25度。
严格地讲,方波最高只能做4倍频,虽然有人用时差法可以分的更细,但那基本不是增量编码器推荐的,更高的分频要用增量脉冲信号是SIN/COS类正余弦的信号来做,后续电路可通过读取波形相位的变化,用模数转换电路来细分,5倍、10倍、20倍,甚至100倍以上,分好后再以方波波形输出(PPR)。分频的倍数实际是有限制的,首先,模数转换有时间响应问题,模数转换的速度与分辨的精确度是一对矛盾,不可能无限细分,分的过细,响应与精准度就有问题;其次,原编码器的刻线精度,输出的类正余弦信号本身一致性、波形完美度是有限的,分的过细,只会把原来码盘的误差暴露得更明显,而带来误差。细分做起来容易,但要做好却很难,其一方面取决于原始码盘的刻线精度与输出波形完美度,另一方面取决于细分电路的响应速度与分辨精准度。例如,德国海德汉的工业编码器,推荐的最佳细分是20倍,更高的细分是其推荐的精度更高的角度编码器,但旋转的速度是很低的。
我公司提供的IDE弦波细分倍频分割器,可提供5,10,20,25,最高到100倍的正余弦波细分倍频。
一个增量编码器细分后输出A/B/Z方波的,还可以再次4倍频,但是请注意,细分对于编码器的旋转速度是有要求的,一般都较低。另外,如原始码盘的刻线精度不高、波形不完美,或细分电路本身的限制,细分也许会波形严重失真,大小步,丢步等,选用及使用时需注意。
前面的问题:一个正余弦A/B输出360PPR的增量编码器,最小分辨角度可能是0.01度(如果25倍分频,且原始码盘精度有保证)。
有些增量编码器,其原始刻线可以是2048线(2的11次方,11位),通过16倍(4位)细分,得到15位PPR ,再次4倍频(2位),得到了17位(Bit)的分辨率,这就是有些日系编码器的17位高位数编码器的得来了,它一般就用“位,Bit”来表达分辨率了。这种日系的编码器在较快速度时,内部仍然要用未细分的低位信号来处理输出的,要不然响应就跟不上了,所以不要被它的“17位”迷惑了。