OMAP3630 Linux I2C总线驱动分析(2)
4 OMAP3630 I2C device驱动
在Linux内核中,I2C device驱动位于drivers/i2c/chips目录下,可以看到该目录下有很多相关的device驱动,这里以xxxx项目的mma7455为例介绍device驱动的注册过程,对应的device驱动程序为mma7455.c。
既然有device驱动,那么必定有相应的device,I2C的device是什么呢?其实就是我们在1.3节中提到的i2c_client,所以在device驱动注册之前先来了解下i2c_client的注册过程。
4.1 Mma7455 device注册
Mma7455 device即i2c_client的创建以及注册分为两步。
4.1.1 将mma7455设备信息加入到设备链表
在板级初始化时将I2C device的名称,地址和相关的信息加入到链表__i2c_board_list中,该链表记录了具体开发板上的I2C设备信息。
在board-xxxx.c中,定义了mma7455的设备信息定义如下:
static struct i2c_board_info __initdata xxxx_i2c_bus3_info[] = { …… #ifdef CONFIG_SENSORS_MMA7455 { I2C_BOARD_INFO("mma7455", 0x1D), .platform_data = &xxxx_mma7455_platform_data, }, #endif };
Mma7455加入到设备链表__i2c_board_list的流程图如下图:
图4.1 mma7455加入到I2C设备链表的过程
i2c_register_board_info()函数的定义如下:
int __init i2c_register_board_info(int busnum, struct i2c_board_info const *info, unsigned len) { …… for (status = 0; len; len--, info++) { struct i2c_devinfo *devinfo; devinfo = kzalloc(sizeof(*devinfo), GFP_KERNEL); …… devinfo->busnum = busnum; devinfo->board_info = *info; list_add_tail(&devinfo->list, &__i2c_board_list); } …… }
4.1.2 创建并注册i2c_client
i2c_client的创建和注册在I2C adapter驱动注册过程中完成,I2C adapter驱动的注册可以参考3.2.2节,i2c_add_numbered_adapter()函数在注册I2C adapter驱动的同时会扫描4.1.1中提到的I2C设备链表__i2c_board_list,如果该总线上有对应的I2C设备,则创建相应的i2c_client,并将其注册到I2C core中。流程图如下所示:
图4.2创建并注册i2c_client
相应的代码位于i2c-core.c如下:
static void i2c_scan_static_board_info(struct i2c_adapter *adapter) { …… list_for_each_entry(devinfo, &__i2c_board_list, list) { if (devinfo->busnum == adapter->nr && !i2c_new_device(adapter, &devinfo->board_info)) …… } …… }
在i2c_scan_static_board_info()函数中遍历I2C设备链表__i2c_board_list,设备的总线号和adapter的总线号相等,则使用函数i2c_new_device()创建该设备。
struct i2c_client * i2c_new_device(struct i2c_adapter *adap, struct i2c_board_info const *info) { …… client = kzalloc(sizeof *client, GFP_KERNEL); if (!client) return NULL; client->adapter = adap; client->dev.platform_data = info->platform_data; if (info->archdata) client->dev.archdata = *info->archdata; client->flags = info->flags; client->addr = info->addr; client->irq = info->irq; strlcpy(client->name, info->type, sizeof(client->name)); …… status = i2c_attach_client(client); …… }
在函数i2c_new_device()中创建一个i2c_client,初始化该结构体的adapter,addr,name等变量,这里的client->name被初始化为info->type,在4.1.1中,info->type初始化为“mma7455”, client->name后面会用于I2C device和I2C driver匹配时使用,最后调用i2c_attach_client()将该client注册到I2C core。
int i2c_attach_client(struct i2c_client *client) { struct i2c_adapter *adapter = client->adapter; …… client->dev.parent = &client->adapter->dev; client->dev.bus = &i2c_bus_type; …… res = device_register(&client->dev); …… }
函数i2c_attach_client()进一步初始化i2c_client结构体,将该设备的总线初始化为i2c_bus_type,说明该设备被放在I2C总线上,用于后面跟I2C driver匹配时使用,最后使用device_register(&client->dev)注册该i2c_client设备。
4.2 Mma7455 device驱动注册
在mma7455.c中,定义了mma7455的device驱动,代码如下:
static struct i2c_driver mma7455_driver = { .driver = { .name = "mma7455", }, .class = I2C_CLASS_HWMON, .probe = mma7455_probe, .remove = mma7455_remove, .id_table = mma7455_id, …… };
注册的简要示意图如下:
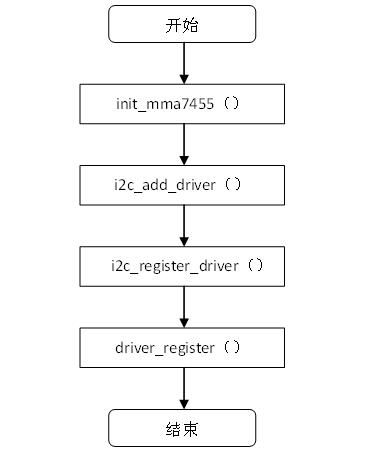
图4.3 device驱动的注册
相应的代码位于mma7455.c和i2c-core.c。
static int __init init_mma7455(void) { …… res = i2c_add_driver(&mma7455_driver); …… return (res); }
在模块加载的时候首先调用init_mma7455(),然后init_mma7455()调用函数i2c_add_driver()注册mma7455_driver结构体。
int i2c_register_driver(struct module *owner, struct i2c_driver *driver) { ……. /* add the driver to the list of i2c drivers in the driver core */ driver->driver.owner = owner; driver->driver.bus = &i2c_bus_type; …… res = driver_register(&driver->driver); if (res) return res; …… }
函数i2c_register_driver()初始化该驱动的总线为i2c_bus_type,然后使用函数driver_register(&driver->driver)注册该驱动,因此内核会在I2C总线上遍历所有I2C设备,由于该mma7455 device驱动的匹配因子name变量为“mma7455”,因此正好和在4.1.2里创建的name也为“mma7455”的i2c client匹配。因此总线的probe函数将会被调用,I2C总线的probe函数为i2c_device_probe(),具体代码如下:
static int i2c_device_probe(struct device *dev) { struct i2c_client *client = to_i2c_client(dev); struct i2c_driver *driver = to_i2c_driver(dev->driver); int status; if (!driver->probe || !driver->id_table) return -ENODEV; client->driver = driver; ……. status = driver->probe(client, i2c_match_id(driver->id_table, client)); …… return status; }
在i2c_device_probe()函数中,语句client->driver = driver将I2C device和I2C driver绑定,然后直接调用具体设备的probe函数,这里即mma7455的probe函数mma7455_probe()。
在mma7455_probe()函数会完成一些具体I2C设备相关的初始化等操作,这边就不再详述。
5 用户空间的支持
图1.1Linux I2C的架构图中的i2c-dev部份是一个通用的I2C设备的驱动程序,通过一个带有操作集file_operations的标准字符设备驱动为用户空间提供了访问接口,使用户空间可以通过I2C core,进而访问I2C adapter。
5.1 I2c-dev的注册
该部分的源代码位于drivers/i2c/i2c-dev.c,首先定义了I2C device驱动i2cdev_driver:
static struct i2c_driver i2cdev_driver = { .driver = { .name = "dev_driver", }, .attach_adapter = i2cdev_attach_adapter, .detach_adapter = i2cdev_detach_adapter, };
i2cdev_driver注册代码如下:
static int __init i2c_dev_init(void) { …… res = register_chrdev(I2C_MAJOR, "i2c", &i2cdev_fops); …… i2c_dev_class = class_create(THIS_MODULE, "i2c-dev"); …… res = i2c_add_driver(&i2cdev_driver); …… }
首先注册了一个主设备号为I2C_MAJOR,操作集为i2cdev_fops,名字为“i2c”的字符设备。在文件drivers/i2c/i2c-dev.h中,I2C_MAJOR被定义为89。在i2c-dev.c中i2cdev_fops的定义如下:
static const struct file_operations i2cdev_fops = { .owner = THIS_MODULE, .llseek = no_llseek, .read = i2cdev_read, .write = i2cdev_write, .unlocked_ioctl = i2cdev_ioctl, .open = i2cdev_open, .release = i2cdev_release, };
该操作集是用户空间访问该字符设备的接口。
然后调用函数i2c_add_driver(&i2cdev_driver)将i2cdev_driver驱动注册到i2c core中,i2cdev_driver驱动注册的流程图如下:
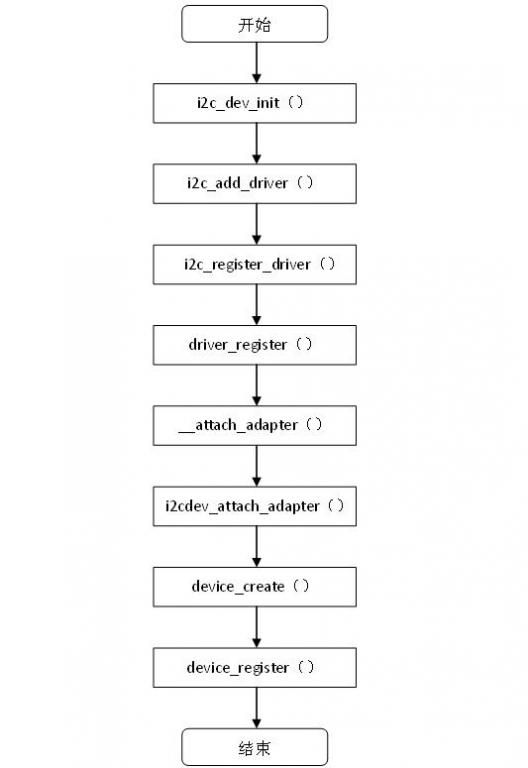
图5.1 i2cdev_driver注册过程
注册i2c_driver时,会将驱动和adapter绑定起来,然后将调用i2c_driver 的attach_adapter 方法,即i2cdev_attach_adapter()函数,建立dev设备节点,每个adapter都会对应一个dev设备节点,并维护了一个i2c_dev链表保存设备节点和adapter的关系。
i2cdev_attach_adapter()函数的代码如下:
static int i2cdev_attach_adapter(struct i2c_adapter *adap) { …… /* register this i2c device with the driver core */ i2c_dev->dev = device_create(i2c_dev_class, &adap->dev, MKDEV(I2C_MAJOR, adap->nr), NULL, "i2c-%d", adap->nr); …… res = device_create_file(i2c_dev->dev, &dev_attr_name); …… }
以I2C_MAJOR和adap->nr为主从设备号创建并注册设备节点,如果系统有udev或者是hotplug,那么就会在/dev下自动创建相关的设备节点了。
5.2 I2c-dev的打开
I2c-dev的open函数如下:
static int i2cdev_open(struct inode *inode, struct file *file) { …… i2c_dev = i2c_dev_get_by_minor(minor); if (!i2c_dev) { ret = -ENODEV; goto out; } adap = i2c_get_adapter(i2c_dev->adap->nr); …… client = kzalloc(sizeof(*client), GFP_KERNEL); if (!client) { i2c_put_adapter(adap); ret = -ENOMEM; goto out; } snprintf(client->name, I2C_NAME_SIZE, "i2c-dev %d", adap->nr); client->driver = &i2cdev_driver; client->adapter = adap; file->private_data = client; …… }
Open操作是用户空间程序和内核驱动交换的第一步,最终返回给用户空间的就是struct file结构体。对于I2C 驱动来说,用户空间所获得的就是client这个关键信息,在其中可以找到所有有关的信息如client所在的adapter及i2c_driver。
用open函数将i2c-dev设备打开以后,就可以通过ioctl函数的各种命令来设定要访问从设备的地址,I2C设备读写等操作,也可以通过 read和write函数完成对I2C设备的读写。
对I2C设备的具体操作在这里不再具体阐述,可以参看i2c-dev.c源代码。
6 I2C数据收发的框架
I2C架构的读写支持两种协议类型,I2C协议与SMBUS协议。
I2C协议和SMBUS协议不完成等同,SMBUS是I2C的子集,SMBUS由I2C衍生而来。SMBUS总线上传输的数据一定是I2C的格式的,但是SMBUS上传输的数据不一定能满足具体某个I2C从设备的通信要求。
6.1 SMBUS协议的数据收发
如果控制器不支持SMBUS协议,框架层可以用i2c_transfer模拟SMBUS协议的实现,系统默认的I2C传输函数一般都是基于I2C模拟的SMBUS方法传输的,如i2c_smbus_write_byte_data(),i2c_smbus_read_byte_data()等。
在设备mma7455的驱动程序中,使用了SMBUS协议,而OMAP3630控制器使用的是I2C协议,因此在mma7455的驱动程序中就用到了基于I2C模拟的SMBUS方法。
下面以函数i2c_smbus_write_byte_data()为例来说明SMBUS协议下的数据发送的过程。
在i2c-core.c中,函数i2c_smbus_write_byte_data()的定义如下:
/** * i2c_smbus_write_byte_data - SMBus "write byte" protocol * @client: Handle to slave device * @command: Byte interpreted by slave * @value: Byte being written * * This executes the SMBus "write byte" protocol, returning negative errno * else zero on success. */ s32 i2c_smbus_write_byte_data(struct i2c_client *client, u8 command, u8 value) { union i2c_smbus_data data; data.byte = value; return i2c_smbus_xfer(client->adapter,client->addr,client->flags, I2C_SMBUS_WRITE,command, I2C_SMBUS_BYTE_DATA,&data); }
函数i2c_smbus_write_byte_data()的调用流程图如下:
图6.1 SMBUS协议下的数据发送过程
从图6.1可以看到,走哪条分支取决于I2C控制器的i2c_algorithm算法,当定义了方法smbus_xfer,则直接调用该方法,如果没有则通过先调用i2c_smbus_xfer_emulated(),进而通过i2c_transfer()最终调用I2C协议下的master_xfer方法,所以我们说SMBUS总线上传输的数据一定是I2C的格式的。
6.2 I2C协议的数据收发
I2C协议下的数据收发函数就是常用的I2C传输函数:i2c_master_send()和i2c_master_recv()。
下面以函数i2c_master_send ()为例来说明I2C协议下的数据发送的过程。
在i2c-core.c中,函数i2c_master_send()定义如下:
/** * i2c_master_send - issue a single I2C message in master transmit mode * @client: Handle to slave device * @buf: Data that will be written to the slave * @count: How many bytes to write * * Returns negative errno, or else the number of bytes written. */ int i2c_master_send(struct i2c_client *client,const char *buf ,int count) { int ret; struct i2c_adapter *adap=client->adapter; struct i2c_msg msg; msg.addr = client->addr; msg.flags = client->flags & I2C_M_TEN; msg.len = count; msg.buf = (char *)buf; ret = i2c_transfer(adap, &msg, 1); /* If everything went ok (i.e. 1 msg transmitted), return #bytes transmitted, else error code. */ return (ret == 1) ? count : ret; }
从源代码中可以看出,函数i2c_master_send()先构造i2c_msg结构体,然后直接调用函数i2c_transfer。简单的示意图如下:
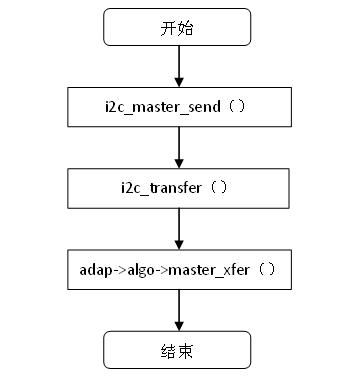
图6-2 I2C协议下的数据发送过程
7. 鸣谢:
http://blogold.chinaunix.net/u1/51562/showart_1403925.html
http://blog.csdn.net/tjd0227/archive/2010/07/21/5753606.aspx