直升机
自从莱特兄弟发明飞机以来,人们一直为能够飞翔蓝天而激动不已,同时又受起飞、着落所需的滑跑所困扰。在莱特兄弟时代,飞机只要一片草地或缓坡就可以起飞、着陆。不列颠之战和巴巴罗萨作战中,当时最高性能的“
喷火”战斗机和
Me 109战斗机也只需要一片平整的草地就可以起飞,除了重轰炸机,很少有必须用“正规”的混凝土跑道起飞、着陆的。今天的飞机的性能早已不能为这些飞机所比,但飞机的滑跑速度、重量和对跑道的冲击,使对起飞、着陆的跑道的要求有增无减,连简易跑道也是高速公路等级的。现代战斗机和其他高性能军用飞机对平整、坚固的长跑道的依赖,日益成为现代空军的致命的软肋。为了摆脱这一困境,从航空先驱的时代开始,人们就在孜孜不倦地研制能够象鸟儿一样腾飞的具有垂直/短距起落能力的飞机。
自从人们跳出模仿飞鸟拍翅飞行的谜思之后,依据贝努力原理的空气动力升力就成为除气球和火箭外所有动力飞行器的基本原理。机翼前行时,上下翼面之间的气流速度差造成上下翼面之间的压力差,这就是升力。所谓“机翼前行”,实际上就是机翼和空气形成相对速度。既然如此,和机身一起前行时,机翼可以造成升力,机身不动而机翼像风车叶一样打转转,和空气形成相对速度,也可以形成升力,这样旋转的“机翼”就成为旋翼,旋翼产生升力就是直升机可以垂直起落的基本原理。
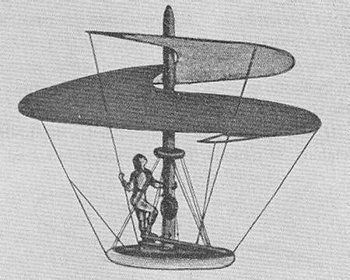
中国小孩竹蜻蜓玩了有 2,000 年了,流传到西方后,成为现代直升机的灵感 / 达·芬奇设计的直升机,到底能不能飞起来,很是可疑
旋翼产生升力的概念并不新鲜,中国儿童玩竹蜻蜓已经有 2,000 多年了,西方也承认流传到西方的中国竹蜻蜓是直升机最初的启示。多才多艺的达·芬奇在 15 世纪设计了一个垂直的螺杆一样的直升机,不过没有超越纸上谈兵的地步。1796 年,英国人 George Cayley 设计了第一架用发条作动力、能够飞起来的直升机,50 年后的 1842 年,英国人 W.H. Philips 用蒸气机作动力,设计了一架只有 9 公斤重的模型直升机。1878 年,意大利人 Enrico Forlanini 用蒸气机制作了一架只有 3.5 公斤重的模型直升机。1880 年,美国发明家托马斯·爱迪生着手研制用电动机驱动的直升机,但最后放弃了。法国人 Paul Cornu 在 1907 年制成第一架载人的直升机,旋翼转速每分钟 90 转,发动机是一台 24 马力的汽油机。Cornu 用旋翼下的“舵面”控制飞行方向和产生前进的推力,但 Cornu 的直升机的速度和飞行控制能力很可怜。

1796 年,英国人 George Cayley 设计了这么一个直升机,最高升到 90 英尺(约 30 米)

法国人 Paul Cornu 在 1907 年设计的第一架载人直升机
但是意大利人 Juan de la Cierva 在 1923 年设计旋翼机时,无意中解决了直升机的一个重大问题,他发明的挥舞铰解决了困扰直升机旋翼设计的一个重大问题。1930 年 10 月,意大利人 Corradino D'Ascanio 的直升机是公认的第一架现代意义上的直升机,在 18 米高度上前飞了 800 多米的距离,D'Ascanio 的直升机用共轴反转双桨。30 年代,德国人 Heinrich Focke 设计了 FA-61 直升机,不断在各种纳粹集会中作公关表演,但德国人 Anton Flettner 设计的 FL282 可算是第一种量产直升机,在二战中为德国海军生产了近 1,000 架,不过没有在战斗中起到什么作用。Igor Sikorsky 设计的 VS300(VS 代表 Vought-Sikorsky,当时 Sikorsky 是 Vought 飞机公司的一部分)第一次采用尾桨,真正奠定了现代直升机的雏形。
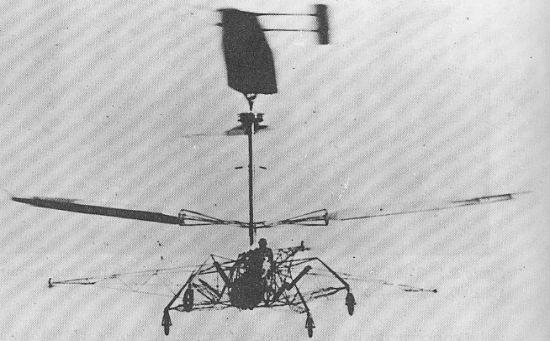
D'Ascanio 的直升机是第一个现代意义上的直升机,能完成前飞,具有基本的飞行控制能力

30 年代德国的 FW61直升机,被纳粹用作宣传纳粹“优越性”的工具 / 德国 FL282 应该是第一架量产型直升机,在二战期间产量达到近 1,000 架,用于德国海军,不过没有对战斗造成什么影响
这是 FL282 的近容
39-40 年 Sikorsky 的 VS300 直升机是现代直升机的“老母鸡”,奠定了现代直升机最常用的尾桨布局 / 尽管贝尔飞机公司在 37 年才开张,45 年的贝尔 47 是第一种量产的实用型直升机,在朝鲜战场就广泛用于伤员救护、侦察、炮兵指引等,从长津湖突围的美国海军陆战队 1 师如果不是贝尔 47 帮助在峡谷上架轻便桥,就没有今天吹牛的本钱了

UH-1 使越南战争成为第一场直升机战争,直升机成为美军士兵进入和撤离战斗最常见的运输工具 / UH-60 是现在美军的主力战术运输直升机,中国在 89 年前进口过一小批,在西藏高原使用的效果十分好
[ 此贴被EEE网情深在2006-11-25 23:40重新编辑 ]
反扭力的问题解决了,还有飞行控制的问题。前飞时,直升机不是不可以采用固定翼飞机一样的气动舵面控制偏航、俯仰、横滚,但悬停的时候怎么办呢?这又回到反扭力问题上来了,有控制地打破反扭力的平衡,不就可以造成飞机向左右的偏转吗?对于常规的主旋翼-尾桨布局,增加、减少尾桨的桨距(绕桨叶纵轴相对于桨叶迎风方向的偏转角),就在不改变尾桨转速的情况下,增加、减少尾桨的效果,达到使飞机偏转的效果。由于动力装置固有的惯性,增加扭力的速度总是不及降低扭力的速度,所以常规的单桨直升机向一侧偏转的速度通常快于向另一侧偏转的速度。


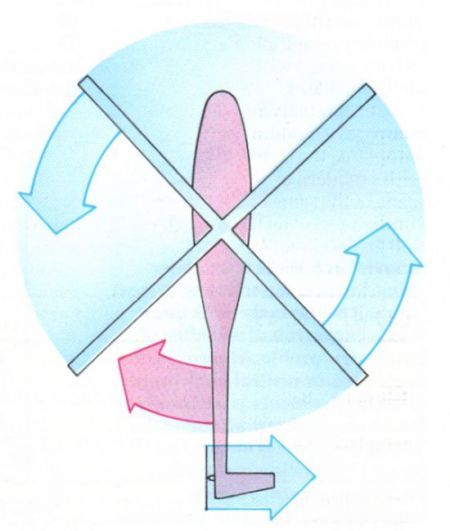
直升机旋翼水平旋转可以实现垂直起落 / 直升机通过将旋翼前倾产生推力
旋翼水平旋转时,自然产生向上的升力,这是直升机得以垂直起落和悬停的基本条件。旋翼向前倾斜,自然就在产生升力的同时,产生前行的推力。但是如何使旋翼前倾呢?将传动轴或发动机向前倾斜是不现实的,机械上太复杂,可靠性也将一塌糊涂。那怎么办呢?采用所谓的旋转斜板(swash plate),如下图所示。
周期矩控制示意图,注意上旋转斜板和旋翼桨叶的连接,和下旋转斜板受飞行员控制的可调角度
上旋转斜板紧贴下旋转斜板滑动(或在接触面上安装滚珠,减少摩擦阻力),其倾斜角度由下旋转斜板决定。上旋转斜板随旋翼转动,由于前低后高,连杆和支点的作用迫使旋翼上升下降,最后按斜板的角度旋转,达到旋翼倾斜旋转。下旋转斜板不随旋翼转动,但倾斜角度可以由飞行员通过机械连杆或液压作动筒控制,以控制旋翼的倾斜角度。下旋转斜板不光可以前低后高,还可以左低右高,或向任意方向偏转。这就是直升机旋翼可以向任意方向倾斜的道理。这个改变旋翼在每个旋转周期内角度的控制称周期距控制(cyclic control),用来控制行进方向。直升机的另一个主要的飞行控制为桨叶的桨距(pitch),用来控制升力,这称为总距控制(collective control)。和固定翼飞机的飞行控制不同,直升机不靠气动翼面实现飞行控制,而是靠这总矩控制和周期距控制 实现飞行控制。
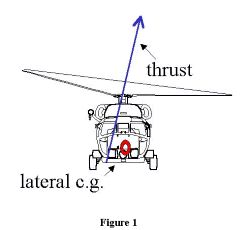
旋翼倾斜,造成升力的作用力轴线倾斜,由于作用力轴线不再通过重心,造成扭转力矩,使飞机向旋翼倾斜方向滚转,直到作用力轴线重又通过重心,恢复平衡
周期距控制不仅用来控制行进方向,还用来控制滚转姿态。正常飞行时,旋翼的升力轴线必定通过飞机的重心,不然飞机要发生滚转。周期距控制使旋翼倾斜的同时,升力轴线同时倾斜,偏离直升机的重心,造成滚转力矩。飞机发生滚转之后,飞行员的控制逐渐回中(否则就一直滚转下去了),重心位置移动,升力轴线重又通过重心,恢复平衡,尽管这时飞机可能是歪着或前倾、后仰的。事实上,为了在中速巡航时机身保持水平,以减小平飞阻力,直升机的重心通常都在旋翼圆心稍后的地方,这样旋翼可以自然向前倾斜一定的角度,而机身依然保持水平。但为了达到最大速度,机身应该前倾,也就是压低机头,这样好最大限度地发挥发动机功率,而不至于产生不必要的升力,本意要向前飞得快,结果速度没有上去多少,反而越飞越高了。同样道理,从空中急降时,用周期距控制使机头高高仰起,旋翼后倾,既利用增加的机身迎风面积造成的阻力减速,又利用主旋翼向前的推力分量做反推力刹车,可以极快地减速、着陆,减少在敌人火力下的暴露时间。周期距控制也使直升机的侧飞、倒飞成为可能,既强化了悬停中对侧风的补偿能力,又极大地增强了对常规固定翼飞机来说匪夷所思的非常规机动性能。
直升机异乎寻常的起落性能提供了无数可能性,也带来无数的问题,其中一个就是翻滚问题。在侧风中垂直着陆时,机身在周期距控制下向迎风方向倾斜以保持平衡,这和侧风中骑自行车要歪着身子是一样道理。在悬停过程中,机身横滚的支点还是在重心,但一侧机轮首先接地时,机轮就变成支点,这时如果控制不当,就会“别住脚”,向外侧翻滚,造成事故。为了恢复水平,如果升力轴线在着地机轮的内侧,应该降低总距(减油门),用重力使机身正确落地;如果升力轴线在着地机轮外侧,那就应该增加总距(加油门),用升力来恢复水平姿态。用错了,就会发生翻滚事故。没有侧风但是在起伏的舰船甲板上着陆,也有同样的问题。反过来的问题是在斜坡上起飞。飞行员必须小心地寻找旋翼水平的姿态,先将一侧机轮离地,机身达到水平状态,再增加升力,使另一侧机轮离地,达到升空。如果动作过急,在升力轴线还没有垂直时就匆忙离地,即使后离地的机轮没有拖地以造成不利滚动力矩,支点从后离地的机轮瞬时转移到机身重心所造成的剧烈摆动,可能使飞机失控。由于侧风和地面乱流的影响,旋翼水平还不一定就是正确的姿态,必须对侧风和乱流进行补偿,所以直升机在复杂条件下的起落需要相当的技巧。

侧风下垂直着陆,要防止支点突然转移到外侧机轮而引起翻滚的问题 / 斜坡上起飞,要注意不能太猛,否则重心突然从后离地的机轮向重心转移,会造成突然而剧烈的摆动,危害飞行安全
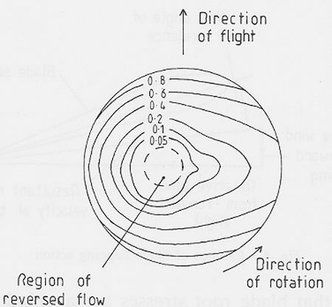
旋翼是圆周运动,由于半径的关系,翼尖处线速度已经接近音速时,圆心处线速度为零!所以旋翼靠近圆周的地方产生最大的升力,而靠近圆心的地方只产生微不足道的升力。桨叶向前划行时,桨叶和空气的相对速度高于旋转本身所带来的线速度;反之,桨叶向后划行时,桨叶和空气的相对速度就低于旋转本身所带来的线速度,这样,旋翼两侧产生的升力还不均匀,不做任何补偿的话,升力差可以达到 5:1。这个周期性的升力变化不仅使机身向一侧倾斜,而且每片桨叶在圆周中不同方位产生不同的升力和阻力,周期性地对桨叶产生强烈的扭曲,既大大加速材料的疲劳,又引起很大的振动。所以旋翼的气动设计可以比高性能固定翼飞机的机翼设计更为复杂。

直升机以 130 公里/小时前行,主旋翼翼尖线速度 420 公里/小时,桨叶在不同位置和气流的相对速度是不同的,产生的升力也不同 / 固定桨叶的升力分布,等高线是与半翼展处产生的升力的比值
前面提到的 de la Cierva 是在实践中发现这个问题的。他的模型旋翼机试飞很成功,但是全尺寸的旋翼机一上天就横滚翻,开始以为是遇到突然的横风,第二架飞机上天同样命运。de la Cierva 经过研究,发现模型旋翼机的桨叶是用藤条材料做的,有弹性,而全尺寸旋翼机的桨叶是刚性的钢结构,由此认识到桨叶的挥舞铰的必要性。具体来说,为了补偿左右的升力不均匀,和减少桨叶的疲劳,桨叶在翼根要采用一个容许桨叶载回转过程中上下挥舞的铰链,这个铰链称为挥舞铰(flapping hinge,也称垂直铰)。桨叶在前行时,升力增加,桨叶自然向上挥舞。由于桨叶在旋转过程中同时上升,桨叶的实际运动方向不再是水平的,而是斜线向上的。桨叶和水平面的夹角虽然不因为桨叶向上挥舞而改变,但桨叶和气流的相对运动方向之间的夹角由于这斜线向上的运动而变小,这个夹角(而不是桨叶和水平面之间的夹角)才是桨叶真正的迎角。桨叶的迎角在升力作用下下降,降低升力。桨叶在后行时,桨叶的升力不足,自然下垂,变旋转边下降造成桨叶和气流相对运动方向之间的夹角增大,迎角增加,增加升力。由于离心力使桨叶有自然拉直的趋势,桨叶不会在升力作用下无限升高或降低,机械设计上也采取措施,保证桨叶的挥舞不至于和机体发生碰撞。桨叶在环形过程中,不断升高、降低,翼尖离圆心的距离不断改变,引起科里奥利效应(这个东西谁都“知道”,但说清楚不容易。谁要是能把这个东西说清楚,鲜花奉上),就像花样滑冰运动员经常把双臂张开、收拢,以控制旋转速度。要是一个手臂张开,一个手臂收拢,就不可能在原地旋转,就要东倒西歪了。所以桨叶在水平方向也要前后摇摆,以补偿桨叶上下挥舞所造成的科里奥利效应。摆振铰利用前行时阻力增加,使桨叶自然增加后掠角(即所谓“滞后”, 因为桨叶在旋转方向上的角速度低于圆心的旋转速度),这也变相增加桨叶在气流方向上剖面的长度,加强了减小迎角的作用;在后行时,阻力减小,阻尼器(相当于弹簧)使桨叶恢复的正常位置(即所谓“领先”,因为桨叶在旋转方向上的角速度高于圆心的旋转速度),当然也加强了增加迎角的作用,所以摆振铰(drag hinge 也称水平铰)也称领先-滞后铰(lead lag hinge)。挥舞铰和摆振铰是旋翼升力均匀的飞行平稳的关键。由于桨叶在旋转中容许上下挥动和前后摆动,这种桨叶称为柔性桨叶(articulated rotor)。除了用机械铰链容许桨叶在环形过程中相对于其他桨叶有一定的挥舞外,材质也必须具有弹性,这就是为什么直升机停在地面时,桨叶总是“耷拉”着的原因。但机械铰链磨损大,可靠性不好,德国 MBB(战时著名的梅塞斯米特就是 MBB 中的 M)用弹性元件取代了挥舞铰,研制成功无铰桨叶,第一个应用无铰桨叶的是 MBB Bo-105,中国曾进口一批,用于支援海上采油平台。

挥舞铰示意图,前行桨叶可以在升力作用下向上有所挥舞,从而降低升力,达到平衡;后行桨叶则向下弯曲,从而提高升力,达到平衡 / 采用挥舞铰后的升力分布,要均匀得多
双叶旋翼是一个特例,桨叶和圆心的桨毂刚性连接,但用一个单一的“跷跷板”铰链同时代替挥舞铰和摆振铰,所以也称为半刚性桨叶(semi-rigid rotor)。跷跷板铰链在一侧桨叶上扬时,将另一侧桨叶自然下压;在一侧桨叶“领先”时,将另一侧桨叶自然“滞后”,既简化了机械设计,又完美地实现了更复杂的机械设计才能实现的功能。贝尔直升机公司用双叶用出了味道,越战期间漫天蝗虫似的 UH-1 就是双叶,后来的 AH-1 也是。不过“跷跷板”设计只能用于双叶旋翼。双叶旋翼有无可置疑的简洁性和由此而来的成本和可靠性上的优势,但双叶旋翼也只有两片桨叶可以产生升力和推力,和多叶桨叶相比,就要增加旋翼直径,增加旋翼转速,前者增加总体尺寸和阻力,后者增加噪声。

第一个采用无铰桨叶的 Bo-105 / Bo-105 的无铰桨叶,用弹性元件代替了挥舞铰和摆振铰,但变距铰依然保留

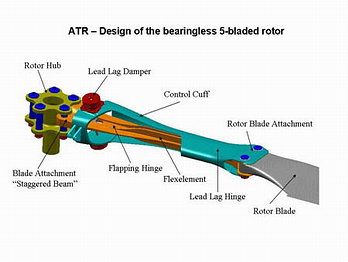
EC-135 更进一步,甚至取消了使桨叶改变桨距的变距铰,也用弹性元件代替了 / EC-135 的先进技术桨叶(Advanced Technology Rotor,简称ATR,属hingeless bearingless),采用弹性元件代替所有机械铰链,避免机械磨损,减轻重量,改善飞行平稳性
[/url]

单桨直升机的起飞重量终归有限,要增大起飞重量,就要增加旋翼直径,增加旋翼转速,增加桨叶数目,加强传动轴,这些都增加了旋翼系统的机械复杂性和重量。旋翼直径和转速受到翼尖速度不能超过音速的限制,否则音障带来的阻力和振动将不可忍受,更大的旋翼直径也迫使尾撑长度增加,增加结构重量。较大的旋翼也对狭小场地的起落造成不便。大幅度提高起飞重量最有效的途径,还是采用两个甚至更多的旋翼,分担负担。除了一些设想中的四旋翼方案,三旋翼没有见到过,还是双旋翼最常见。既然采用两个旋翼,如果旋转方向相反,一个顺时针旋转,一个逆时针旋转,就自然抵消相互的反扭力。反转的双旋翼不需要特别考虑尾桨和尾撑的结构,也没有尾桨吃掉对推进和升力没有作用的功率的问题,可以把所有功率都用于升力和推进,这是双旋翼额外的优点。双旋翼(也称双桨)有多种方案,可以前后串列,可以左右并列,可以上下共轴,还可以上下不共轴。串列双桨的典型有美国的 CH-46、CH-47;并列双桨的典型有俄罗斯的米-12,直升机状态的美国
[url=http://www.afwing.com/intro/v22/1.htm]
V-22
也可以算作并列双桨;共轴双桨(co-axial 或 contra-rotating)的典型当然非俄罗斯的 K-25、K-31 等卡莫夫直升机莫属;异轴双桨(更准确地说,是交替双桨,也称交叉双桨,intermeshing)的只有美国卡曼的 H-34 Husky 和 K-Max 等少数例子。
串列和并列双桨布局示意图

串列双桨的 CH-47 / 并列双桨的米-12

共轴双桨示意图 / 共轴双桨的卡-31


交替双桨示意图 / 交替双桨的 K-Max
串列双桨对于最大限度地利用机身长度有利,CH-46、CH-47 机舱长但并不累赘,总长并不为此增加多少,而单桨的米-6 就“横阔竖大”了。串列双桨中离发动机较远的那副旋翼(一般是前旋翼)的功率要求比驱动尾桨高得多,为了保证前后旋翼的同步,串列双桨需要长长的沉重的同步传动轴,而不能简单地由前发动机驱动前旋翼,后发动机驱动后旋翼。串列双桨的前后旋翼一般上下错开一点,这样可以容许前后旋翼之间在高度上有一定的重合,缩短全机长度。上下的高度差太少了,不能保证安全,尤其是大幅度机动动作时,上下桨叶可能发生碰撞。高度差太大了,支撑后旋翼的“柱子”太过高大,阻力巨大。
并列双桨通常是安装在机翼翼尖的,翼展由旋翼半径决定,没有办法靠上下重合而缩短翼展,在气动上难于优化。左右旋翼之间要设交叉的同步轴,以保证左右两副旋翼永远同步。还有一个问题是,左右旋翼都在机身中段附近,仅靠周期距,俯仰控制力矩不足。但这都不是最大的问题,最大的问题是横滚稳定性,两侧旋翼升力不均匀时,飞机会发生横滚,如果在急速下降过程中,飞机不幸进入自己的下洗气流,旋翼效率急剧降低,旋翼越用力,越使不上劲,好像汽车轮子打滑一样,加剧横滚的不稳定倾向,飞机在几秒钟内就可以倾覆失控,V-22 的几次坠毁就是这样造成的。强烈的不对称气流扰动也可以造成这个现象。发动机安装在机身还好说,要是发动机安装的机翼翼尖,离重心很远,进一步加强了横滚不稳定的倾向。
共轴双桨用套筒轴驱动上下两副反转的旋翼,同样有串列双桨的上下旋翼之间的间距问题,间距小了,上下旋翼有可能打架;间距大了,不光阻力高,对驱动轴的刚度要求也高,而大功率的套筒轴本来在机械上就难度很大。套筒轴不光要传递功率,还要传递上面旋翼的总距、周期距控制,在机械设计上有相当的难度。由于非对称升力的缘故,反向旋转的上下旋翼的旋转平面有在一侧“交会”的倾向,这进一步增加了对上下旋翼之间间距的要求,并且带来向交会一侧转弯必须比向另一侧转弯轻缓的要求。上旋翼处在“干净”空气中,下旋翼处在上旋翼的下洗气流中,这样,上下旋翼之间有相当的气动耦合,增加了气动设计的难度。由于共轴双桨没有尾桨,短短的尾撑用于支持垂直安定面,后者在前飞中提供像固定翼飞机一样的气动控制,减小周期距控制的负担。由于共轴双桨的机身短,受侧风影响较小。共轴双桨的振动也由于两副反转的旋翼而较好地对消了,平稳性和悬停性好。共轴双桨在同等升力下,旋翼直径可以较小,直升机总尺寸较紧凑,“占地面积”较小,特别适合海军上舰的需要。
交替双桨可算是共轴双桨的一个变种,从正面看,两副旋翼的翼尖路径(tip path plane,TPP)有交叉,会打架,但只要在算好时间差,你方唱罢我登场,不会打架的。最简单的情况,两副旋翼都是双叶,也就是只有一直线的前后两片桨叶,左旋翼的起始位置是东西向,右旋翼的位置是南北向,两副旋翼同步反向旋转,一个转到东西向的时候,另一个转到南北向,永远不会交会。交替双桨的优点是机械上比串列、并列和共轴双桨简单得多,缺点是旋翼的桨叶数也受到限制,到现在为止,没有超过双叶的,所以只适用于不超过一定尺寸的直升机。

西科斯基 S-66,和洛克希德 AH-56“夏延”竞争落败,但速度比“夏延”更快,号称世界第一。S-66 的尾部螺旋浆可以转向,向后做推进用,向左作反扭力用,而不像“
夏延
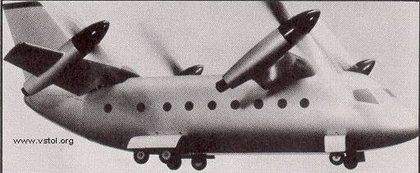
”那样,用两个专用的推进螺旋桨和反扭力尾桨 50-60 年代时,采用单独的推力发动机的复合直升机方案如雨后春笋,有不少达到试飞阶段,其中 Piasecki 的 16H 是其中的佼佼者。Piasecki 16H 采用一个尾置的涵道螺旋桨提供推力,涵道螺旋桨后有控制舵面,利用后洗气流提供偏航和俯仰控制。主旋翼依然保留周期距控制,用于悬停或非常规机动时提供控制。Piasecki 的方案在 60 年代没有引起足够的兴趣,但是在 90 年代,重新引起美国军方的兴趣。Piasecki 将 16H 的概念用在 UH-60 上,试制了所谓“速度鹰”(Speed Hawk),不仅提高了速度,还将航程提高了 3 倍,使“速度鹰”的航程和 F-18 战斗机相当,用作海军的搜索救援直升机十分有利。同样的概念还用在 AH-64“阿帕奇”攻击直升机上,速度提高 25%。环形尾的问题主要有两个:环形尾套件增加重量,“速度鹰”比基型的 UH-60 要重 800 公斤。另一个问题是即以对旋翼下洗气流的遮挡减低旋翼效率,旋翼功率要增加,否则悬停性能要受到损失。
Piasecki 16H 采用尾置涵道螺旋桨(也称“环形尾”,ringtail)作为平飞的推进器,短翼提供平飞升力,将旋翼“解放”出来,大大提高平飞速度,也大大降低机械振动和疲劳

“速度鹰” (Speed Hawk),这是 Piasecki 用 UH-60 的机体和主要机械系统作基础,研制的“推力转向涵道推进”(Variable Thrust Duct Propeller)研究机
VTDP 前飞时的状态,略微向前进方向的左侧偏转,反扭力作用部分由气动舵面完成 / VTDP 在悬停时的状态,可伸缩的“斗篷”向左偏转 90 度,加强反扭力作用

Piachecki 也推出了“速度眼镜蛇”和“速度阿帕奇”方案
[url=http://www.mx3g.com/misc.php?action=viewratings&tid=755&pid=1997][/url]
30 年代末,大学刚毕业的 Friedrich von Doblhoff 异想天开,建议在旋翼翼尖上安装法国工程师 Rene Leduk 早年发明的冲压式喷气发动机,驱动旋翼,现在称之为喷气翼尖(tip jet)。发动机驱动旋翼旋转是造成反扭力的原因,即使新奇的方案如“夏延”,依然逃脱不了采用尾桨平衡反扭力的布局。喷气翼尖在桨叶内通过管路向翼尖输送高压压缩空气,压缩空气从翼尖向后喷出,就可以推动桨叶转动。喷气翼尖的极端是直接在旋翼翼尖安装微型喷气发动机,喷气驱动旋翼旋转。由于桨轴不是驱动轴,旋翼转动没有反扭力,所以不需要尾桨。桨叶内输导压缩空气的能力有限,结构也复杂,但发动机可以放在机体内。翼尖喷气发动机的方案在技术上更有诱惑力,燃料在离心力的作用下,可以容易地向翼尖输送,燃烧用的空气也主要由管路输送过来的压缩空气提供,因为在翼尖的发动机进气受圆周运动的影响太大。发动机必须轻小,一般采用结构简单的脉动喷气发动机(pulse jet)或冲压喷气发动机(ram jet)。喷气翼尖的问题是噪声不仅巨大,而且尖厉,有规则,特别烦人。不过最大噪声实际上延续时间不长,只有起飞和着陆的一、两分钟时间,不过这没有能够使环保组织的反对声轻下去。Doblhoff 在战时的研究工作取得了有限的成果,战争结束时,Doblhoff 用卡车拉着样机和资料,和工作人员一起从苏军正在逼近的奥地利往西撤退,最后在德奥边境向美军投降。战后,Doblhoff 和他的样机一起到了美国,Doblhoff 到美国麦克唐纳工作,主持了麦克唐纳 XV-1 的设计,这是美国第一架喷气翼尖的直升机。但与此同时,Doblhoff 的主要结构设计师和试飞员 August Stepan 去了英国,日后成为 Fairey Rotodyne 的主要设计人之一。然而,喷气翼尖、推进发动机和固定的机翼相结合,有效地将直升机、旋翼机和固定翼飞机的优点结合起来。

Hiller 应该说是喷气翼尖的另一个先驱,在 50 年就推出了 HOE-1 研究直升机

麦克唐纳在从德国“俘虏”过来的喷气翼尖鼻祖 Feiedrich von Doblhoff 的主持下,在 50 年代研制了 XV-1 研究直升机,除采用喷气翼尖外,还在机身尾部单独采用推进螺旋桨提供推力,尾撑顶端的小型螺旋桨用于方向控制
最著名的采用喷气翼尖的旋翼-直升机要数英国 Fairey 的 Rotodyne。60 年代城际交通迅速发展,短途航空旅行的诱惑力日增,但固定翼飞机需要远离城市的机场的问题,始终限制了短途航空旅行的发展,很多垂直-短距起落飞机的方案应运而生。城际中短途空运不要求悬停或非常规机动性能,垂直/短距起落能力更为重要,所以旋翼-直升机具有相当的吸引力。Fairey Rotodyne 用喷气翼尖实现垂直起落,用旋翼的周期距控制俯仰和横滚,翼下双发差动推力控制在直升机状态下的方向,在平飞阶段,气动舵面辅助飞行控制。机翼在平飞阶段产生一半以上的升力,旋翼 的桨距减到最低,靠空气动力自旋,以减小阻力。Fairey Rotodyne 在试飞期间,创造了伦敦市中心到巴黎市中心的速度记录。旋翼-直升机的无滑跑倾斜起飞和准垂直降落,不仅极大地降低了对机场跑道和净空的要求,也由于起落空间不重叠,实际上增加了同等机场空间内起落架次的容量。由于噪声、资金和 60 年代初英国航空工业的全面重组,Fairey 被 Westland 收购,Westland 把重点转移到以引进的西科斯基技术为基础的常规直升机的研制上,Fairey Rotodyne 下马了,所有资料和工具被销毁,样机被肢解,至今还有不少人惋惜。进入 21 世纪,喷气翼尖又有死灰复燃的迹象。美国 Groen Brothers 提出用喷气翼尖驱动旋翼,研制 C-130 一级的大型旋翼-直升机,作为战场空运的主力,满足从 CH-47 到 C-130 之间的战术空运需要。Groen Bothers 方案最大的诱惑在于,这个改装思路可以用于任何现成的上单翼运输机,比如 C-130。旋翼的支点在上单翼和机身的结合部,可以最大限度地减小对飞机重心和气动特性的影响,理论上可以以比重型直升机或倾转旋翼飞机低得多的代价,开发具有垂直起落能力的大型飞机。如果不强调悬停和非常规机动的话,旋翼-直升机的魅力确实是很大的。
采用喷气翼尖最著名的还是 Fairey Rotodyne,本来是很有潜力成为中短途城市航运的主力的


Fairey Rotodyne 在飞行中的雄姿 / Rotodyne 在一开始接到很多航空公司的意向订货,但英国的“国航”BAE 最终没有下订单,别的意向订货也在一夜之间蒸发了,堪称是“协和”式的前奏

Fairey 被 Westland 收购后,由于英国政府资金不足,英国空军和英国“国航”的订单不到位,在成功的试飞后下马了,设计资料、工具、样机全部销毁,今天只能在画上自慰了
美国的 Groen Brother 公司是旋翼机的最新热衷者,Groen Brothers 向美国军方建议,用 C-130 一级的机身,配以带喷气翼尖的旋翼系统,实现垂直起落


Groen 还想诱惑海军,用作航母上的运输机 / Groen Brothers 也在向森林灭火部门推销这个方案
[ 此贴被EEE网情深在2006-11-25 23:37重新编辑 ]


V-22 的半刚性旋翼清晰可见 / V-22 的宽弦、大弯度、无铰、无轴承桨叶清晰可见


起飞、着陆时,襟翼放下,最大限度地减小对下洗气流的遮挡 / 为了适合上舰的需要,V-22 的旋翼可以折叠,机翼还可以横转90度,和机体平行,以节约占地空间
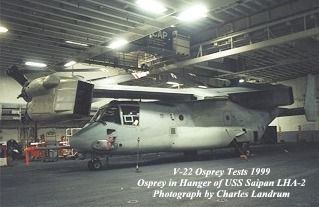
V-22 着舰试验,一侧旋翼在甲板上空、一侧旋翼在舷外时,两侧升力不均匀,容易造成事故。一架接一架紧接着快速降落时,前面飞机造成的空气涡流容易使后面的飞机进入危险的“涡流环”状态(vortex ring),造成旋翼吃不上劲,导致坠机 / 这是在两栖登陆建“塞班”号机舱内的情景
V-22 的性能被说得如此出众,人们不禁疑惑,为什么总统的“海军陆战队一号”要选新机时,没有选 V-22?
贝尔在 V-22 的成功之后,向两条战线出击,一是将倾转旋翼技术用于无人机,以最大限度地利用其垂直起落和速度、航程上的优势,二是将倾转旋翼技术推向民航市场。早先雄心勃勃的中短程支线客机看来一时还难以实现,但小型公务机已经开始了,贝尔和意大利的 Agusta 合作,正在研制 BA-609,其垂直起落的能力和速度、航程将对大公司、政府机构的要员从城市中心到城市中心的空中旅行有很大的诱惑力。欧洲从 80-90 年代开始,也展开了倾转旋翼的研究。法、德合作的 Eurotilt 和英、意合作的 Eurofar 最后合并成一个计划,但在 V-22 和 BA-609 面临一系列技术困难后,速度放慢,估计现在处于观望状态,在等待倾转旋翼的技术进一步成熟、技术风险进一步降低后再行动。

BA-609 的 BA 代表 Bell Agusta,将成为倾转旋翼在民用领域里“吃螃蟹的人” / BA-609 是面对有钱的阔佬的


BA-609 在警方和海岸警卫队中也有望得到青睐 / BA-609 已经试飞,正在欧洲大力推销,力图抢在欧洲公司的前面霸占市场
法国主导的 Eurotilt 倾转旋翼飞机方案
Eurotilt 的倾转和 V-22 稍有不同,只有发动机前半部分倾转,介于 tilt rotor 和 tilt shaft 之间


贝尔当然不会把倾转旋翼的概念只用在载人飞机上,在如火如荼的无人机领域,贝尔也推出了采用倾转旋翼的“鹰眼”(Eagle Eye) / “鹰眼”预计要和海军或海岸警卫队的舰船配合行动,所以有很高的上舰要求
尽管 V-22 在研制过程中遇到严重的问题,美国军方对用具有垂直/短距起落能力的运输机作为战术空运主力的概念依然不肯放弃,在 V-22 尚未大规模服役时,已经开始对更大型垂直/短距起落运输机的研制,贝尔的方案自然是 V-22 的延伸:采用四旋翼的倾转旋翼方案,即所谓 quad tilt rotor。值得注意的是,倾转旋翼的发动机通常都是成双布置的。除非在机顶重心处安装一根很高的桅杆,倾转旋翼基本不可能是单旋翼的。
贝尔提出的四旋翼倾转旋翼(Quad Tilt Rotor,简称 QTR)方案,用于担当美军战场空运的主力 / 媒体为新飞机的名字都想好了:V-44,尽管军方并没有这样的命名

四旋翼尽管顺理成章,但平飞时前后旋翼之间相互之间的气动干扰可能会很严重,尤其是机动飞行的时候,后发动机也要避开前发动机的尾流 / QTR 可以用于在城市中心机降“重型部队”(相对空降兵来说)

QTR 的结构想象图,传动轴不仅要左右同步,前后也要同步,复杂性和重量肯定要增加

QTR 是和 Groen Brothers 的 Gyrolifter 竞争,当然也不会忘了海军型 / 四旋翼倾转旋翼运输机的另一个方案

NASA 还在研究更大型的 QTR,用于民航
螺旋桨可以看成小直径、宽弦、大弯度的刚性旋翼,除了桨距以外,没有挥舞铰、摆振铰之类的,只是螺旋桨一般比刚性旋翼的直径小一点就是了。不过直径小,对减小前飞阻力具有不可置疑的好处。只要能够满足垂直起落要求,用螺旋桨代替旋翼是倾转旋翼的一个自然的延伸,Curtis-Wright 就是这方面的先驱。Curtiss-Wright 是航空先驱 Glenn Curtiss 和 Wright 兄弟的公司合并的结果,50 年代时已经落后于喷气时代,但在螺旋桨领域还是一方好汉。倾转的螺旋桨称为 tilt prop。螺旋桨需要较高的转速才能产生足够的推力,这对小直径刚性的桨叶不成问题。不过 Curtiss-Wright 的研究机没有发展到 V-22 的阶段,估计快速下降时,会有更严重的“涡流环”问题。但是 Curtiss-Wright 的螺旋桨还有玄机在里面。普通螺旋桨是针对迎面气流的,如果把螺旋桨略微向上倾斜一点,下行的桨叶相对迎面气流的迎角增加,上行桨叶的迎角减小,这样下行桨叶产生向下的划动大于上行桨叶产生向上的划动,产生所谓“轴向升力”(radial lift),可以减小机翼面积,有螺旋桨产生部分升力。这里要注意的是,螺旋桨抬起来一点,倾泻的推理矢量本身就产生一点向下的升力分量,但轴向升力比这点升力分量要大很多。为了最大限度地实现轴向升力,螺旋桨的桨叶应该是宽弦、大弯度的。Curtiss-Wright 先研制 X-100 研究机,特意设计了出奇地小的机翼,以证明轴向升力的概念。不过要是现垂直起落,还是要老老实实把发动机竖起来,推力朝下。在向军方游说假如下面还要提到的三军联合直升机计划后,空军同意投资,这以后Curtiss-Wright 在已经部分完成的 M-200 试验机基础上,大规模展开四发动机的 X-19 的研制,采用四个角落的四台发动机的差动升力控制横滚和俯仰姿态,螺旋桨的差动扭力控制偏航。试飞中,控制反应不够灵敏,控制力矩不足,但机械可靠性是最大的问题,主齿轮箱的寿命只有 50 小时,发动机的倾转机构只有 15 小时的寿命。在 50 个起落的试飞中,留空时间一共只有 4 小时,计划在 4 个月后放弃了。

Curtiss Wright X-100 是 X-19 的先驱,只有两台发动机,采用导至机尾的发动机废气喷管提供姿态控制,效果不好

Curtiss Wright X-19,预计用作小型公务机或短程客机,但飞行控制问题没法很好地解决
Curtiss Wright X-19 在悬停中,前后左右的四台发动机用于悬停中的姿态控制。为了避免陀螺力矩,左前、右后和左后、右前的发动机交联
由于螺旋桨比直升机旋翼简单、可靠,平飞速度高,美国军方对 X-19 寄予很大的希望,空军、海军、陆军三军联合研制,这是“三军攻击运输机计划”(Tri-Service Assault Transport)的一部分。
自从人们跳出模仿飞鸟拍翅飞行的谜思之后,依据贝努力原理的空气动力升力就成为除气球和火箭外所有动力飞行器的基本原理。机翼前行时,上下翼面之间的气流速度差造成上下翼面之间的压力差,这就是升力。所谓“机翼前行”,实际上就是机翼和空气形成相对速度。既然如此,和机身一起前行时,机翼可以造成升力,机身不动而机翼像风车叶一样打转转,和空气形成相对速度,也可以形成升力,这样旋转的“机翼”就成为旋翼,旋翼产生升力就是直升机可以垂直起落的基本原理。
中国小孩竹蜻蜓玩了有 2,000 年了,流传到西方后,成为现代直升机的灵感 / 达·芬奇设计的直升机,到底能不能飞起来,很是可疑
旋翼产生升力的概念并不新鲜,中国儿童玩竹蜻蜓已经有 2,000 多年了,西方也承认流传到西方的中国竹蜻蜓是直升机最初的启示。多才多艺的达·芬奇在 15 世纪设计了一个垂直的螺杆一样的直升机,不过没有超越纸上谈兵的地步。1796 年,英国人 George Cayley 设计了第一架用发条作动力、能够飞起来的直升机,50 年后的 1842 年,英国人 W.H. Philips 用蒸气机作动力,设计了一架只有 9 公斤重的模型直升机。1878 年,意大利人 Enrico Forlanini 用蒸气机制作了一架只有 3.5 公斤重的模型直升机。1880 年,美国发明家托马斯·爱迪生着手研制用电动机驱动的直升机,但最后放弃了。法国人 Paul Cornu 在 1907 年制成第一架载人的直升机,旋翼转速每分钟 90 转,发动机是一台 24 马力的汽油机。Cornu 用旋翼下的“舵面”控制飞行方向和产生前进的推力,但 Cornu 的直升机的速度和飞行控制能力很可怜。
1796 年,英国人 George Cayley 设计了这么一个直升机,最高升到 90 英尺(约 30 米)
法国人 Paul Cornu 在 1907 年设计的第一架载人直升机
但是意大利人 Juan de la Cierva 在 1923 年设计旋翼机时,无意中解决了直升机的一个重大问题,他发明的挥舞铰解决了困扰直升机旋翼设计的一个重大问题。1930 年 10 月,意大利人 Corradino D'Ascanio 的直升机是公认的第一架现代意义上的直升机,在 18 米高度上前飞了 800 多米的距离,D'Ascanio 的直升机用共轴反转双桨。30 年代,德国人 Heinrich Focke 设计了 FA-61 直升机,不断在各种纳粹集会中作公关表演,但德国人 Anton Flettner 设计的 FL282 可算是第一种量产直升机,在二战中为德国海军生产了近 1,000 架,不过没有在战斗中起到什么作用。Igor Sikorsky 设计的 VS300(VS 代表 Vought-Sikorsky,当时 Sikorsky 是 Vought 飞机公司的一部分)第一次采用尾桨,真正奠定了现代直升机的雏形。
D'Ascanio 的直升机是第一个现代意义上的直升机,能完成前飞,具有基本的飞行控制能力
30 年代德国的 FW61直升机,被纳粹用作宣传纳粹“优越性”的工具 / 德国 FL282 应该是第一架量产型直升机,在二战期间产量达到近 1,000 架,用于德国海军,不过没有对战斗造成什么影响
这是 FL282 的近容
39-40 年 Sikorsky 的 VS300 直升机是现代直升机的“老母鸡”,奠定了现代直升机最常用的尾桨布局 / 尽管贝尔飞机公司在 37 年才开张,45 年的贝尔 47 是第一种量产的实用型直升机,在朝鲜战场就广泛用于伤员救护、侦察、炮兵指引等,从长津湖突围的美国海军陆战队 1 师如果不是贝尔 47 帮助在峡谷上架轻便桥,就没有今天吹牛的本钱了
UH-1 使越南战争成为第一场直升机战争,直升机成为美军士兵进入和撤离战斗最常见的运输工具 / UH-60 是现在美军的主力战术运输直升机,中国在 89 年前进口过一小批,在西藏高原使用的效果十分好
[ 此贴被EEE网情深在2006-11-25 23:40重新编辑 ]
直升机能够垂直飞起来的基本道理简单,但飞行控制就不简单了。旋翼可以产生升力,但谁来产生前进的推力呢?单独安装另外的推进发动机当然可以,但这样增加重量和总体复杂性,能不能使旋翼同时担当升力和推进作用呢?升力-推进问题解决后,还有转向、俯仰、滚转控制问题。旋翼旋转产生升力的同时,对机身产生反扭力(初中物理:有作用力就一定有反作用力),所以直升机还有一个特有的反扭力控制问题。
直升机主旋翼反扭力的示意图
没有一定的反扭力措施,直升机就要打转转 / 尾桨是抵消反扭力的最常见的方法
直升机抵消反扭力的方案有很多,最常规的是采用尾桨。主旋翼顺时针转,对机身就产生逆时针方向的反扭力,尾桨就必须或推或拉,产生顺时针方向的推力,以抵消主旋翼的反扭力。


抵消反扭力的主旋翼-尾桨布局,也称常规布局,因为这最常见 / 典型的贝尔 407 的尾桨
主旋翼当然也可以顺时针旋转,顺时针还是逆时针,两者之间没有优劣之分。有意思的是,美、英、德、意、日直升机的主旋翼都是逆时针旋转,法、俄、中、印、波兰直升机都是顺时针旋转,英、德、意、日的直升机工业都是从美国引进许可证开始的,和美国采用相同的习惯可以理解,中、印、波兰是从前苏联和法国引进许可证开始的,和法、俄的习惯相同也可以理解,但美国和俄罗斯为什么从一开始选定不同的方向,法国为什么不和选美国一样的方向,而和俄罗斯一致,可能只是一个历史的玩笑。
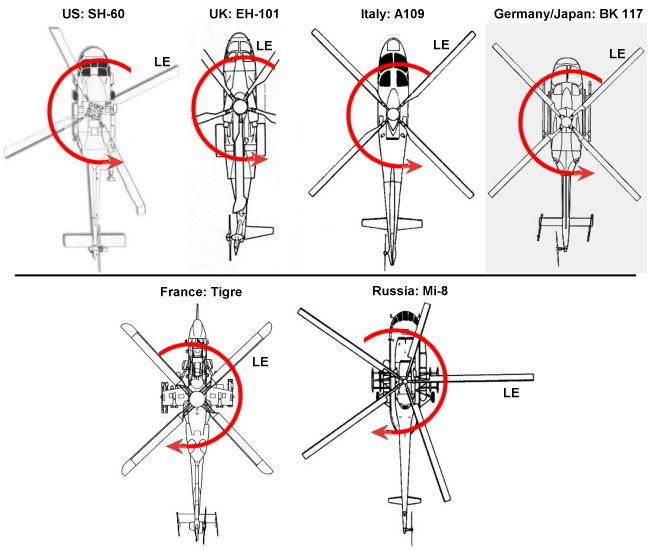
各国直升机主旋翼旋转方向的比较
尾桨给直升机的设计带来了很多麻烦。尾桨要是太大了,会打到地上,所以尾桨尺寸受到限制,要提供足够的反扭力,就需要提高转速,这样,尾桨翼尖速度就大,尾桨的噪声就很大。极端情况下,尾桨翼尖速度甚至可以超过音速,形成音爆。尾桨需要安装在尾撑上,尾撑越长,尾桨的力矩越大,反扭力效果越好,但尾撑的重量也越大。为了把动力传递到尾桨,尾撑内需要安装一根长长的传动轴,这又增加了重量和机械复杂性。尾桨是直升机飞行安全的最大挑战,主旋翼失去动力,直升机还可以自旋着陆;但尾桨一旦失去动力,那直升机就要打转转,失去控制。在战斗中,直升机因为尾桨受损而坠毁的概率远远高于因为其他部位被击中的情况。即使不算战损情况,平时使用中,尾桨对地面人员的危险很大,一不小心,附近的人员和器材就会被打到。在居民区或林间空地悬停或起落时,尾桨很容易挂上建筑物、电线、树枝、飞舞物品。
尾桨可以是推式,也可以是拉式,一般认为以推式的效率为高。虽然不管推式还是拉式,气流总是要流经尾撑,但在尾桨加速气流前,低速气流流经尾撑的动能损失较小。尾桨的旋转方向可以顺着主旋翼,也就是说,对于逆时针旋转的主旋翼,尾桨向前转(或者说,从右面向直升机看,尾桨顺时针旋转),这样尾桨对主旋翼的气动干扰小,主旋翼的升力可以充分发挥。尾桨也可以逆着主旋翼的方向旋转,也就是说,对于逆时针旋转的主旋翼,尾桨向后转(或者说,从右面向直升机看,尾桨逆时针旋转),这样尾桨和主旋翼之间形成一个互相干扰,主旋翼的升力受到损失,但尾桨的作用加强,所以可以缩小尺寸,或降低功率。两者没有绝对的优劣,设计得当时,一般选择顺着转,只有设计不当、尾桨控制作用不够时,才选择逆着转,像
米-24
直升机那样。
涵道尾桨(fenestron)将尾桨缩小,“隐藏”在尾撑端部的巨大开孔里,相当于给尾桨安上一个罩子,这样大大改善了安全性,不易打到周围的物体。由于涵道尾桨的周边是遮蔽的,尾桨翼尖附近的气流情况大大简化,翼尖速度较高也不至于大大增加噪声。罩子的屏蔽也使前后方向上的噪声大大减小。涵道尾桨的缺点是风扇的包围结构带来较大的重量,这个问题随涵道尾桨直径增加而急剧恶化,所以涵道尾桨难以用到大型直升机上。涵道尾桨只有法国直升机上采用,美国的下马了的 Comanche 是法国之外少见的采用涵道尾桨的例子。


海豚直升机上的涵道尾桨 / 经典的采用涵道尾桨的 EC-120 直升机,中国参加合作制造

已经下马的美国 RAH-66“科曼奇”直升机同样采用涵道尾桨
另一个取代尾桨的方案是 NOTAR,NOTAR 是 No Tail Rotor(意为无尾桨)的简称,用喷气引射和主旋翼下洗气流的有利交互作用形成反扭力。主旋翼产生的下洗气流从尾撑两侧流经尾撑,发动机产生的压缩空气通过尾撑一侧的向下开槽喷出,促使这一侧的下洗气流向尾撑表面吸附并加速(即所谓射流效应或 Coanda 效应),形成尾撑两侧气流的速度差,产生向一侧的侧推力,实现没有尾桨的反扭力。尾撑顶端的直接喷气控制提供更精细的方向控制,但不提供主要的反扭力,不是不可以,而是用射流效应可以用较少的喷气就实现较大的反扭力。从这个原理推而广之,如果把尾撑的截面做成机翼一样,下洗气流本身就可产生侧推力,甚至可以在下侧安装类似襟翼的装置以控制侧推力,岂不更好?不知道为什么,没有人这样做。NOTAR 的噪音比涵道风扇更低,安全性更好,在演示中,只要主旋翼不打到树枝,直接把尾撑捅到树丛里也照样安全飞行,但 NOTAR 同样没有用到大型直升机上的例子。NOTAR 只有麦道(现波音)直升机上使用,可能是专利的缘故。
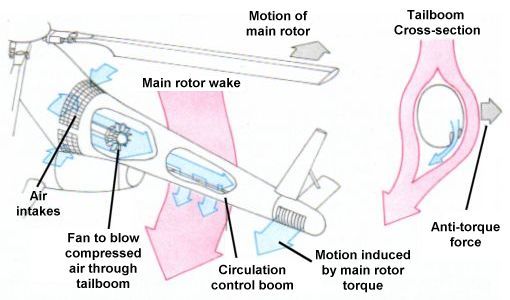
NOTAR 的原理简图

采用 NOTAR 的
MD600N
直升机,不知道为什么,MD 直升机还是叫 MD,不叫波音
直升机主旋翼反扭力的示意图
没有一定的反扭力措施,直升机就要打转转 / 尾桨是抵消反扭力的最常见的方法
直升机抵消反扭力的方案有很多,最常规的是采用尾桨。主旋翼顺时针转,对机身就产生逆时针方向的反扭力,尾桨就必须或推或拉,产生顺时针方向的推力,以抵消主旋翼的反扭力。
抵消反扭力的主旋翼-尾桨布局,也称常规布局,因为这最常见 / 典型的贝尔 407 的尾桨
主旋翼当然也可以顺时针旋转,顺时针还是逆时针,两者之间没有优劣之分。有意思的是,美、英、德、意、日直升机的主旋翼都是逆时针旋转,法、俄、中、印、波兰直升机都是顺时针旋转,英、德、意、日的直升机工业都是从美国引进许可证开始的,和美国采用相同的习惯可以理解,中、印、波兰是从前苏联和法国引进许可证开始的,和法、俄的习惯相同也可以理解,但美国和俄罗斯为什么从一开始选定不同的方向,法国为什么不和选美国一样的方向,而和俄罗斯一致,可能只是一个历史的玩笑。
各国直升机主旋翼旋转方向的比较
尾桨给直升机的设计带来了很多麻烦。尾桨要是太大了,会打到地上,所以尾桨尺寸受到限制,要提供足够的反扭力,就需要提高转速,这样,尾桨翼尖速度就大,尾桨的噪声就很大。极端情况下,尾桨翼尖速度甚至可以超过音速,形成音爆。尾桨需要安装在尾撑上,尾撑越长,尾桨的力矩越大,反扭力效果越好,但尾撑的重量也越大。为了把动力传递到尾桨,尾撑内需要安装一根长长的传动轴,这又增加了重量和机械复杂性。尾桨是直升机飞行安全的最大挑战,主旋翼失去动力,直升机还可以自旋着陆;但尾桨一旦失去动力,那直升机就要打转转,失去控制。在战斗中,直升机因为尾桨受损而坠毁的概率远远高于因为其他部位被击中的情况。即使不算战损情况,平时使用中,尾桨对地面人员的危险很大,一不小心,附近的人员和器材就会被打到。在居民区或林间空地悬停或起落时,尾桨很容易挂上建筑物、电线、树枝、飞舞物品。
尾桨可以是推式,也可以是拉式,一般认为以推式的效率为高。虽然不管推式还是拉式,气流总是要流经尾撑,但在尾桨加速气流前,低速气流流经尾撑的动能损失较小。尾桨的旋转方向可以顺着主旋翼,也就是说,对于逆时针旋转的主旋翼,尾桨向前转(或者说,从右面向直升机看,尾桨顺时针旋转),这样尾桨对主旋翼的气动干扰小,主旋翼的升力可以充分发挥。尾桨也可以逆着主旋翼的方向旋转,也就是说,对于逆时针旋转的主旋翼,尾桨向后转(或者说,从右面向直升机看,尾桨逆时针旋转),这样尾桨和主旋翼之间形成一个互相干扰,主旋翼的升力受到损失,但尾桨的作用加强,所以可以缩小尺寸,或降低功率。两者没有绝对的优劣,设计得当时,一般选择顺着转,只有设计不当、尾桨控制作用不够时,才选择逆着转,像
米-24
直升机那样。
涵道尾桨(fenestron)将尾桨缩小,“隐藏”在尾撑端部的巨大开孔里,相当于给尾桨安上一个罩子,这样大大改善了安全性,不易打到周围的物体。由于涵道尾桨的周边是遮蔽的,尾桨翼尖附近的气流情况大大简化,翼尖速度较高也不至于大大增加噪声。罩子的屏蔽也使前后方向上的噪声大大减小。涵道尾桨的缺点是风扇的包围结构带来较大的重量,这个问题随涵道尾桨直径增加而急剧恶化,所以涵道尾桨难以用到大型直升机上。涵道尾桨只有法国直升机上采用,美国的下马了的 Comanche 是法国之外少见的采用涵道尾桨的例子。
海豚直升机上的涵道尾桨 / 经典的采用涵道尾桨的 EC-120 直升机,中国参加合作制造
已经下马的美国 RAH-66“科曼奇”直升机同样采用涵道尾桨
另一个取代尾桨的方案是 NOTAR,NOTAR 是 No Tail Rotor(意为无尾桨)的简称,用喷气引射和主旋翼下洗气流的有利交互作用形成反扭力。主旋翼产生的下洗气流从尾撑两侧流经尾撑,发动机产生的压缩空气通过尾撑一侧的向下开槽喷出,促使这一侧的下洗气流向尾撑表面吸附并加速(即所谓射流效应或 Coanda 效应),形成尾撑两侧气流的速度差,产生向一侧的侧推力,实现没有尾桨的反扭力。尾撑顶端的直接喷气控制提供更精细的方向控制,但不提供主要的反扭力,不是不可以,而是用射流效应可以用较少的喷气就实现较大的反扭力。从这个原理推而广之,如果把尾撑的截面做成机翼一样,下洗气流本身就可产生侧推力,甚至可以在下侧安装类似襟翼的装置以控制侧推力,岂不更好?不知道为什么,没有人这样做。NOTAR 的噪音比涵道风扇更低,安全性更好,在演示中,只要主旋翼不打到树枝,直接把尾撑捅到树丛里也照样安全飞行,但 NOTAR 同样没有用到大型直升机上的例子。NOTAR 只有麦道(现波音)直升机上使用,可能是专利的缘故。
NOTAR 的原理简图
采用 NOTAR 的
MD600N
直升机,不知道为什么,MD 直升机还是叫 MD,不叫波音
反扭力的问题解决了,还有飞行控制的问题。前飞时,直升机不是不可以采用固定翼飞机一样的气动舵面控制偏航、俯仰、横滚,但悬停的时候怎么办呢?这又回到反扭力问题上来了,有控制地打破反扭力的平衡,不就可以造成飞机向左右的偏转吗?对于常规的主旋翼-尾桨布局,增加、减少尾桨的桨距(绕桨叶纵轴相对于桨叶迎风方向的偏转角),就在不改变尾桨转速的情况下,增加、减少尾桨的效果,达到使飞机偏转的效果。由于动力装置固有的惯性,增加扭力的速度总是不及降低扭力的速度,所以常规的单桨直升机向一侧偏转的速度通常快于向另一侧偏转的速度。
直升机旋翼水平旋转可以实现垂直起落 / 直升机通过将旋翼前倾产生推力
旋翼水平旋转时,自然产生向上的升力,这是直升机得以垂直起落和悬停的基本条件。旋翼向前倾斜,自然就在产生升力的同时,产生前行的推力。但是如何使旋翼前倾呢?将传动轴或发动机向前倾斜是不现实的,机械上太复杂,可靠性也将一塌糊涂。那怎么办呢?采用所谓的旋转斜板(swash plate),如下图所示。
周期矩控制示意图,注意上旋转斜板和旋翼桨叶的连接,和下旋转斜板受飞行员控制的可调角度
上旋转斜板紧贴下旋转斜板滑动(或在接触面上安装滚珠,减少摩擦阻力),其倾斜角度由下旋转斜板决定。上旋转斜板随旋翼转动,由于前低后高,连杆和支点的作用迫使旋翼上升下降,最后按斜板的角度旋转,达到旋翼倾斜旋转。下旋转斜板不随旋翼转动,但倾斜角度可以由飞行员通过机械连杆或液压作动筒控制,以控制旋翼的倾斜角度。下旋转斜板不光可以前低后高,还可以左低右高,或向任意方向偏转。这就是直升机旋翼可以向任意方向倾斜的道理。这个改变旋翼在每个旋转周期内角度的控制称周期距控制(cyclic control),用来控制行进方向。直升机的另一个主要的飞行控制为桨叶的桨距(pitch),用来控制升力,这称为总距控制(collective control)。和固定翼飞机的飞行控制不同,直升机不靠气动翼面实现飞行控制,而是靠这总矩控制和周期距控制 实现飞行控制。
旋翼倾斜,造成升力的作用力轴线倾斜,由于作用力轴线不再通过重心,造成扭转力矩,使飞机向旋翼倾斜方向滚转,直到作用力轴线重又通过重心,恢复平衡
周期距控制不仅用来控制行进方向,还用来控制滚转姿态。正常飞行时,旋翼的升力轴线必定通过飞机的重心,不然飞机要发生滚转。周期距控制使旋翼倾斜的同时,升力轴线同时倾斜,偏离直升机的重心,造成滚转力矩。飞机发生滚转之后,飞行员的控制逐渐回中(否则就一直滚转下去了),重心位置移动,升力轴线重又通过重心,恢复平衡,尽管这时飞机可能是歪着或前倾、后仰的。事实上,为了在中速巡航时机身保持水平,以减小平飞阻力,直升机的重心通常都在旋翼圆心稍后的地方,这样旋翼可以自然向前倾斜一定的角度,而机身依然保持水平。但为了达到最大速度,机身应该前倾,也就是压低机头,这样好最大限度地发挥发动机功率,而不至于产生不必要的升力,本意要向前飞得快,结果速度没有上去多少,反而越飞越高了。同样道理,从空中急降时,用周期距控制使机头高高仰起,旋翼后倾,既利用增加的机身迎风面积造成的阻力减速,又利用主旋翼向前的推力分量做反推力刹车,可以极快地减速、着陆,减少在敌人火力下的暴露时间。周期距控制也使直升机的侧飞、倒飞成为可能,既强化了悬停中对侧风的补偿能力,又极大地增强了对常规固定翼飞机来说匪夷所思的非常规机动性能。
直升机异乎寻常的起落性能提供了无数可能性,也带来无数的问题,其中一个就是翻滚问题。在侧风中垂直着陆时,机身在周期距控制下向迎风方向倾斜以保持平衡,这和侧风中骑自行车要歪着身子是一样道理。在悬停过程中,机身横滚的支点还是在重心,但一侧机轮首先接地时,机轮就变成支点,这时如果控制不当,就会“别住脚”,向外侧翻滚,造成事故。为了恢复水平,如果升力轴线在着地机轮的内侧,应该降低总距(减油门),用重力使机身正确落地;如果升力轴线在着地机轮外侧,那就应该增加总距(加油门),用升力来恢复水平姿态。用错了,就会发生翻滚事故。没有侧风但是在起伏的舰船甲板上着陆,也有同样的问题。反过来的问题是在斜坡上起飞。飞行员必须小心地寻找旋翼水平的姿态,先将一侧机轮离地,机身达到水平状态,再增加升力,使另一侧机轮离地,达到升空。如果动作过急,在升力轴线还没有垂直时就匆忙离地,即使后离地的机轮没有拖地以造成不利滚动力矩,支点从后离地的机轮瞬时转移到机身重心所造成的剧烈摆动,可能使飞机失控。由于侧风和地面乱流的影响,旋翼水平还不一定就是正确的姿态,必须对侧风和乱流进行补偿,所以直升机在复杂条件下的起落需要相当的技巧。
侧风下垂直着陆,要防止支点突然转移到外侧机轮而引起翻滚的问题 / 斜坡上起飞,要注意不能太猛,否则重心突然从后离地的机轮向重心转移,会造成突然而剧烈的摆动,危害飞行安全
旋翼是圆周运动,由于半径的关系,翼尖处线速度已经接近音速时,圆心处线速度为零!所以旋翼靠近圆周的地方产生最大的升力,而靠近圆心的地方只产生微不足道的升力。桨叶向前划行时,桨叶和空气的相对速度高于旋转本身所带来的线速度;反之,桨叶向后划行时,桨叶和空气的相对速度就低于旋转本身所带来的线速度,这样,旋翼两侧产生的升力还不均匀,不做任何补偿的话,升力差可以达到 5:1。这个周期性的升力变化不仅使机身向一侧倾斜,而且每片桨叶在圆周中不同方位产生不同的升力和阻力,周期性地对桨叶产生强烈的扭曲,既大大加速材料的疲劳,又引起很大的振动。所以旋翼的气动设计可以比高性能固定翼飞机的机翼设计更为复杂。
直升机以 130 公里/小时前行,主旋翼翼尖线速度 420 公里/小时,桨叶在不同位置和气流的相对速度是不同的,产生的升力也不同 / 固定桨叶的升力分布,等高线是与半翼展处产生的升力的比值
前面提到的 de la Cierva 是在实践中发现这个问题的。他的模型旋翼机试飞很成功,但是全尺寸的旋翼机一上天就横滚翻,开始以为是遇到突然的横风,第二架飞机上天同样命运。de la Cierva 经过研究,发现模型旋翼机的桨叶是用藤条材料做的,有弹性,而全尺寸旋翼机的桨叶是刚性的钢结构,由此认识到桨叶的挥舞铰的必要性。具体来说,为了补偿左右的升力不均匀,和减少桨叶的疲劳,桨叶在翼根要采用一个容许桨叶载回转过程中上下挥舞的铰链,这个铰链称为挥舞铰(flapping hinge,也称垂直铰)。桨叶在前行时,升力增加,桨叶自然向上挥舞。由于桨叶在旋转过程中同时上升,桨叶的实际运动方向不再是水平的,而是斜线向上的。桨叶和水平面的夹角虽然不因为桨叶向上挥舞而改变,但桨叶和气流的相对运动方向之间的夹角由于这斜线向上的运动而变小,这个夹角(而不是桨叶和水平面之间的夹角)才是桨叶真正的迎角。桨叶的迎角在升力作用下下降,降低升力。桨叶在后行时,桨叶的升力不足,自然下垂,变旋转边下降造成桨叶和气流相对运动方向之间的夹角增大,迎角增加,增加升力。由于离心力使桨叶有自然拉直的趋势,桨叶不会在升力作用下无限升高或降低,机械设计上也采取措施,保证桨叶的挥舞不至于和机体发生碰撞。桨叶在环形过程中,不断升高、降低,翼尖离圆心的距离不断改变,引起科里奥利效应(这个东西谁都“知道”,但说清楚不容易。谁要是能把这个东西说清楚,鲜花奉上),就像花样滑冰运动员经常把双臂张开、收拢,以控制旋转速度。要是一个手臂张开,一个手臂收拢,就不可能在原地旋转,就要东倒西歪了。所以桨叶在水平方向也要前后摇摆,以补偿桨叶上下挥舞所造成的科里奥利效应。摆振铰利用前行时阻力增加,使桨叶自然增加后掠角(即所谓“滞后”, 因为桨叶在旋转方向上的角速度低于圆心的旋转速度),这也变相增加桨叶在气流方向上剖面的长度,加强了减小迎角的作用;在后行时,阻力减小,阻尼器(相当于弹簧)使桨叶恢复的正常位置(即所谓“领先”,因为桨叶在旋转方向上的角速度高于圆心的旋转速度),当然也加强了增加迎角的作用,所以摆振铰(drag hinge 也称水平铰)也称领先-滞后铰(lead lag hinge)。挥舞铰和摆振铰是旋翼升力均匀的飞行平稳的关键。由于桨叶在旋转中容许上下挥动和前后摆动,这种桨叶称为柔性桨叶(articulated rotor)。除了用机械铰链容许桨叶在环形过程中相对于其他桨叶有一定的挥舞外,材质也必须具有弹性,这就是为什么直升机停在地面时,桨叶总是“耷拉”着的原因。但机械铰链磨损大,可靠性不好,德国 MBB(战时著名的梅塞斯米特就是 MBB 中的 M)用弹性元件取代了挥舞铰,研制成功无铰桨叶,第一个应用无铰桨叶的是 MBB Bo-105,中国曾进口一批,用于支援海上采油平台。
挥舞铰示意图,前行桨叶可以在升力作用下向上有所挥舞,从而降低升力,达到平衡;后行桨叶则向下弯曲,从而提高升力,达到平衡 / 采用挥舞铰后的升力分布,要均匀得多
双叶旋翼是一个特例,桨叶和圆心的桨毂刚性连接,但用一个单一的“跷跷板”铰链同时代替挥舞铰和摆振铰,所以也称为半刚性桨叶(semi-rigid rotor)。跷跷板铰链在一侧桨叶上扬时,将另一侧桨叶自然下压;在一侧桨叶“领先”时,将另一侧桨叶自然“滞后”,既简化了机械设计,又完美地实现了更复杂的机械设计才能实现的功能。贝尔直升机公司用双叶用出了味道,越战期间漫天蝗虫似的 UH-1 就是双叶,后来的 AH-1 也是。不过“跷跷板”设计只能用于双叶旋翼。双叶旋翼有无可置疑的简洁性和由此而来的成本和可靠性上的优势,但双叶旋翼也只有两片桨叶可以产生升力和推力,和多叶桨叶相比,就要增加旋翼直径,增加旋翼转速,前者增加总体尺寸和阻力,后者增加噪声。
第一个采用无铰桨叶的 Bo-105 / Bo-105 的无铰桨叶,用弹性元件代替了挥舞铰和摆振铰,但变距铰依然保留
EC-135 更进一步,甚至取消了使桨叶改变桨距的变距铰,也用弹性元件代替了 / EC-135 的先进技术桨叶(Advanced Technology Rotor,简称ATR,属hingeless bearingless),采用弹性元件代替所有机械铰链,避免机械磨损,减轻重量,改善飞行平稳性
[/url]
单桨直升机的起飞重量终归有限,要增大起飞重量,就要增加旋翼直径,增加旋翼转速,增加桨叶数目,加强传动轴,这些都增加了旋翼系统的机械复杂性和重量。旋翼直径和转速受到翼尖速度不能超过音速的限制,否则音障带来的阻力和振动将不可忍受,更大的旋翼直径也迫使尾撑长度增加,增加结构重量。较大的旋翼也对狭小场地的起落造成不便。大幅度提高起飞重量最有效的途径,还是采用两个甚至更多的旋翼,分担负担。除了一些设想中的四旋翼方案,三旋翼没有见到过,还是双旋翼最常见。既然采用两个旋翼,如果旋转方向相反,一个顺时针旋转,一个逆时针旋转,就自然抵消相互的反扭力。反转的双旋翼不需要特别考虑尾桨和尾撑的结构,也没有尾桨吃掉对推进和升力没有作用的功率的问题,可以把所有功率都用于升力和推进,这是双旋翼额外的优点。双旋翼(也称双桨)有多种方案,可以前后串列,可以左右并列,可以上下共轴,还可以上下不共轴。串列双桨的典型有美国的 CH-46、CH-47;并列双桨的典型有俄罗斯的米-12,直升机状态的美国
[url=http://www.afwing.com/intro/v22/1.htm]
V-22
也可以算作并列双桨;共轴双桨(co-axial 或 contra-rotating)的典型当然非俄罗斯的 K-25、K-31 等卡莫夫直升机莫属;异轴双桨(更准确地说,是交替双桨,也称交叉双桨,intermeshing)的只有美国卡曼的 H-34 Husky 和 K-Max 等少数例子。
串列和并列双桨布局示意图
串列双桨的 CH-47 / 并列双桨的米-12
共轴双桨示意图 / 共轴双桨的卡-31
交替双桨示意图 / 交替双桨的 K-Max
串列双桨对于最大限度地利用机身长度有利,CH-46、CH-47 机舱长但并不累赘,总长并不为此增加多少,而单桨的米-6 就“横阔竖大”了。串列双桨中离发动机较远的那副旋翼(一般是前旋翼)的功率要求比驱动尾桨高得多,为了保证前后旋翼的同步,串列双桨需要长长的沉重的同步传动轴,而不能简单地由前发动机驱动前旋翼,后发动机驱动后旋翼。串列双桨的前后旋翼一般上下错开一点,这样可以容许前后旋翼之间在高度上有一定的重合,缩短全机长度。上下的高度差太少了,不能保证安全,尤其是大幅度机动动作时,上下桨叶可能发生碰撞。高度差太大了,支撑后旋翼的“柱子”太过高大,阻力巨大。
并列双桨通常是安装在机翼翼尖的,翼展由旋翼半径决定,没有办法靠上下重合而缩短翼展,在气动上难于优化。左右旋翼之间要设交叉的同步轴,以保证左右两副旋翼永远同步。还有一个问题是,左右旋翼都在机身中段附近,仅靠周期距,俯仰控制力矩不足。但这都不是最大的问题,最大的问题是横滚稳定性,两侧旋翼升力不均匀时,飞机会发生横滚,如果在急速下降过程中,飞机不幸进入自己的下洗气流,旋翼效率急剧降低,旋翼越用力,越使不上劲,好像汽车轮子打滑一样,加剧横滚的不稳定倾向,飞机在几秒钟内就可以倾覆失控,V-22 的几次坠毁就是这样造成的。强烈的不对称气流扰动也可以造成这个现象。发动机安装在机身还好说,要是发动机安装的机翼翼尖,离重心很远,进一步加强了横滚不稳定的倾向。
共轴双桨用套筒轴驱动上下两副反转的旋翼,同样有串列双桨的上下旋翼之间的间距问题,间距小了,上下旋翼有可能打架;间距大了,不光阻力高,对驱动轴的刚度要求也高,而大功率的套筒轴本来在机械上就难度很大。套筒轴不光要传递功率,还要传递上面旋翼的总距、周期距控制,在机械设计上有相当的难度。由于非对称升力的缘故,反向旋转的上下旋翼的旋转平面有在一侧“交会”的倾向,这进一步增加了对上下旋翼之间间距的要求,并且带来向交会一侧转弯必须比向另一侧转弯轻缓的要求。上旋翼处在“干净”空气中,下旋翼处在上旋翼的下洗气流中,这样,上下旋翼之间有相当的气动耦合,增加了气动设计的难度。由于共轴双桨没有尾桨,短短的尾撑用于支持垂直安定面,后者在前飞中提供像固定翼飞机一样的气动控制,减小周期距控制的负担。由于共轴双桨的机身短,受侧风影响较小。共轴双桨的振动也由于两副反转的旋翼而较好地对消了,平稳性和悬停性好。共轴双桨在同等升力下,旋翼直径可以较小,直升机总尺寸较紧凑,“占地面积”较小,特别适合海军上舰的需要。
交替双桨可算是共轴双桨的一个变种,从正面看,两副旋翼的翼尖路径(tip path plane,TPP)有交叉,会打架,但只要在算好时间差,你方唱罢我登场,不会打架的。最简单的情况,两副旋翼都是双叶,也就是只有一直线的前后两片桨叶,左旋翼的起始位置是东西向,右旋翼的位置是南北向,两副旋翼同步反向旋转,一个转到东西向的时候,另一个转到南北向,永远不会交会。交替双桨的优点是机械上比串列、并列和共轴双桨简单得多,缺点是旋翼的桨叶数也受到限制,到现在为止,没有超过双叶的,所以只适用于不超过一定尺寸的直升机。
所有双桨布局均采用分别的总距和周期距控制,所有桨叶都有各自的“三铰”(变距铰、挥舞铰、摆振铰,或起同等作用的相应的弹性元件)。对于共轴双桨和交替双桨布局来说,转向是通过改变上下或左右旋翼的扭力来实现的。增加顺时针旋翼的桨距,使其更能吃上劲,减少逆时针旋翼的桨距,使其吃劲小一点,就造成扭矩差,使直升机向逆时针方向偏转,反之亦然。交替双桨的方向控制和共轴双桨相同。由于上下或左右旋翼的桨距增减是对称的,共轴双桨或交替双桨向左右转向的速度是一样的。主旋翼也比尾桨更能吃上劲,所以转向也更快捷,可以作所谓的“急转”(snap turn)。 对于串列和并列双桨布局来说,转向是通过使前后或左右旋翼在水平方向上通过周期距控制产生差动的扭转推力来实现的。换句话说,前旋翼向左倾斜,在产生升力的同时,产生向右的水平推力分量;后旋翼向右倾斜,同样在产生升力的同时,产生向左的水平推力分量。前后一“夹攻”,飞机就向右偏转,反之亦然。前后旋翼反向倾斜,偏转的支点是机身中央。如果光倾斜前旋翼,就可以绕后机身打转转;光倾斜后旋翼,当然也就可以绕前机身打转转;如果控制得当,甚至可以一面转一面侧飞。事实上,串列双桨几乎像超市里四个轮子可以分别转向的购物车一样,爱怎么走就可以怎么走,爱怎么转就可以怎么转,不过有的时候太灵活了,选择太多了,反而容易弄糊涂,这个道理是一样的。并列双桨也是同样道理,只是把前后双桨变成左右双桨。
直升机不光可以垂直起落,还可以悬停、侧飞、倒飞、原地转弯。直升机的这些非常规机动动作提供了空前的战术灵活性,比如,反坦克直升机可以在低于树梢的极低空高度悬停,在战机恰当的时刻,突然冒起来发射武器,然后迅速下降到树梢以下高度隐蔽,既可以躲避对方直射武器的打击,又有利于隐蔽地转移阵地。如果装备桅杆顶的观察装置装置的话,可以更好地隐蔽观察敌情、掌握战机。同样的战术也适用于山脊、建筑物等适当的隐蔽物背后。在巷战中,直升机可以隐蔽在建筑物后悬停,在适当时机侧飞出来发射武器,然后迅速返回隐蔽位置,这样可以避开敌人从远处房顶的观察和伏击。在营救和精确定点空降作业中,悬停中的侧飞和倒飞更是必不可少的。然而,成也萧何,败也萧何,直升机的旋翼不光提供了空前的机动能力,也从根本上限制了前飞速度。旋翼尺寸和桨叶数的限制不谈,飞机的前飞速度不可能超过旋翼翼尖的线速度,在极限情况下,假定飞机的前飞速度和翼尖速度都为音速的一半,前行方向上,翼尖速度在 3 点钟方向已经达到音速,而后行方向上,翼尖在 9 点钟方向的速度就为零,要发生失速。实际上,翼尖失速速度要高于零速度,所以飞行速度比理论上的极限情况要低。另外,由于半径的关系,旋翼前倾时,旋翼翼尖附近是产生推力的部分,中间部分的线速度低,实际上不产生推力,是在迎风气流的作用下像风车一样地自旋,靠近圆心的部分的线速度低于失速速度,已经处在失速区了。由于前飞时旋翼前倾,阻力在旋翼上形成一个向下的分量,造成速度越大,“降力”越大的尴尬局面,必须用增加的升力来补偿,白白浪费发动机功率。据计算,直升机的理论速度不能超过 420 公里/小时。英国 Westland 公司对旋翼翼尖进行加大后掠角的修形,使直升机速度有了不小的提高,但还是没有突破这个理论限制。
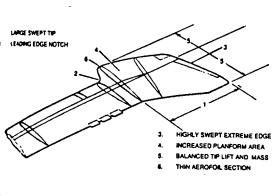

英国 Westland 的先进旋翼翼尖采用复杂形状的后掠角 /
桨
叶的截面(翼型)也从翼根到翼尖不断变薄,以延迟激波的产生,这个道理和超音速飞机用大后掠角、薄翼型的机翼一样
这是一架 Westland 大山猫直升机在做斤斗特技,其先进桨叶的特别形状清晰可见
理论上,只要旋翼线速度突破音障,直升机速度进一步提高就是可能的。固定翼超音速飞机的机翼理论早已解决。但固定翼飞机的机翼处于相对简单的气流流场,直升机旋翼所处的流场实在太复杂了,不光有前进方向,还有旋转的切向和径向方向,此外,在机身上发动机结构和旋翼之间,还有复杂的纵向的马蹄形流和横向的涡漩。即使这些问题都解决了,理论上有可能研制出一种弯弯的马刀形状的桨叶,延迟超音速激波的产生,但桨叶受力情况十分复杂,包括扭曲、拉伸,在材料上要制造足够坚固耐用又轻巧的旋翼很困难,旋翼要突破音障不是一件容易的事。要突破直升机速度的限制,只有突破旋翼既作为升力装置又作为推力装置的局限。

发动机舱周边有马蹄形流 / 发动机舱两侧也有横向的涡流
[url=http://www.mx3g.com/misc.php?action=viewratings&tid=755&pid=1996][/url]

突破旋翼既作为升力装置又作为推力装置的第一步就是为旋翼减轻负担,用单独的推进装置提供推力。从 50 年代开始,大量方案就是从在普通直升机上加装推进发动机开始,将常规直升机改装为复合直升机(compound holicopter)。采用专用的推进发动机,前飞时,旋翼就不必前倾,既减小迎风面积带来的阻力,又避免了前倾旋翼造成的“降力”。为了进一步减轻旋翼的负担,直升机还可以安装短翼,在前飞时提供气动升力,这样,对旋翼产生升力的要求可以降到最低,后行桨叶失速也就不成为问题,消除了直升机速度上不去的一大障碍。
很多常规直升机并没有专用的推进发动机,但安装了短翼,就是为了在前飞中产生升力,减低对旋翼升力的依赖,以提高前飞速度。对于攻击直升机来说,短翼还是提供武器挂架的好地方。采用短翼的典型直升机有米-6、AH-64 等,米-24 的短翼也有提供升力的作用,但最主要的目的却是加强横滚稳定性。就像世上所有的好事一样,没有免费的午餐。短翼不光增加结构重量,最大的问题是遮挡旋翼的下洗气流,削弱了旋翼的效率。所以强调悬停和直升机特有的非常规机动性能的直升机常常不选用短翼,即使采用短翼,也使短翼有较大的下反,以减小对旋翼下洗气流的不利遮挡。有人把这种采用短翼的直升机也称为复合直升机,因为升力的产生已经不再单纯依靠旋翼,但通常人们还是把升力和推力两者都不再依靠旋翼的直升机称为复合直升机。

米-6的短翼用于在平飞时产生升力,为旋翼卸载 / AH-64 的短翼同时兼作武器挂架,一物两用

卡莫夫 Ka-22 是早期复合直升机的一个典范,曾创造多项速度和载重记录 / MBB 的 BBH 攻击直升机,采用常规的“开放”推进螺旋桨作推动力,计划被取消后,转入和法国合作发展“虎”式直升机
[ 此贴被EEE网情深在2006-11-25 23:34重新编辑 ]
直升机不光可以垂直起落,还可以悬停、侧飞、倒飞、原地转弯。直升机的这些非常规机动动作提供了空前的战术灵活性,比如,反坦克直升机可以在低于树梢的极低空高度悬停,在战机恰当的时刻,突然冒起来发射武器,然后迅速下降到树梢以下高度隐蔽,既可以躲避对方直射武器的打击,又有利于隐蔽地转移阵地。如果装备桅杆顶的观察装置装置的话,可以更好地隐蔽观察敌情、掌握战机。同样的战术也适用于山脊、建筑物等适当的隐蔽物背后。在巷战中,直升机可以隐蔽在建筑物后悬停,在适当时机侧飞出来发射武器,然后迅速返回隐蔽位置,这样可以避开敌人从远处房顶的观察和伏击。在营救和精确定点空降作业中,悬停中的侧飞和倒飞更是必不可少的。然而,成也萧何,败也萧何,直升机的旋翼不光提供了空前的机动能力,也从根本上限制了前飞速度。旋翼尺寸和桨叶数的限制不谈,飞机的前飞速度不可能超过旋翼翼尖的线速度,在极限情况下,假定飞机的前飞速度和翼尖速度都为音速的一半,前行方向上,翼尖速度在 3 点钟方向已经达到音速,而后行方向上,翼尖在 9 点钟方向的速度就为零,要发生失速。实际上,翼尖失速速度要高于零速度,所以飞行速度比理论上的极限情况要低。另外,由于半径的关系,旋翼前倾时,旋翼翼尖附近是产生推力的部分,中间部分的线速度低,实际上不产生推力,是在迎风气流的作用下像风车一样地自旋,靠近圆心的部分的线速度低于失速速度,已经处在失速区了。由于前飞时旋翼前倾,阻力在旋翼上形成一个向下的分量,造成速度越大,“降力”越大的尴尬局面,必须用增加的升力来补偿,白白浪费发动机功率。据计算,直升机的理论速度不能超过 420 公里/小时。英国 Westland 公司对旋翼翼尖进行加大后掠角的修形,使直升机速度有了不小的提高,但还是没有突破这个理论限制。
英国 Westland 的先进旋翼翼尖采用复杂形状的后掠角 /
桨
叶的截面(翼型)也从翼根到翼尖不断变薄,以延迟激波的产生,这个道理和超音速飞机用大后掠角、薄翼型的机翼一样
这是一架 Westland 大山猫直升机在做斤斗特技,其先进桨叶的特别形状清晰可见
理论上,只要旋翼线速度突破音障,直升机速度进一步提高就是可能的。固定翼超音速飞机的机翼理论早已解决。但固定翼飞机的机翼处于相对简单的气流流场,直升机旋翼所处的流场实在太复杂了,不光有前进方向,还有旋转的切向和径向方向,此外,在机身上发动机结构和旋翼之间,还有复杂的纵向的马蹄形流和横向的涡漩。即使这些问题都解决了,理论上有可能研制出一种弯弯的马刀形状的桨叶,延迟超音速激波的产生,但桨叶受力情况十分复杂,包括扭曲、拉伸,在材料上要制造足够坚固耐用又轻巧的旋翼很困难,旋翼要突破音障不是一件容易的事。要突破直升机速度的限制,只有突破旋翼既作为升力装置又作为推力装置的局限。
发动机舱周边有马蹄形流 / 发动机舱两侧也有横向的涡流
[url=http://www.mx3g.com/misc.php?action=viewratings&tid=755&pid=1996][/url]
突破旋翼既作为升力装置又作为推力装置的第一步就是为旋翼减轻负担,用单独的推进装置提供推力。从 50 年代开始,大量方案就是从在普通直升机上加装推进发动机开始,将常规直升机改装为复合直升机(compound holicopter)。采用专用的推进发动机,前飞时,旋翼就不必前倾,既减小迎风面积带来的阻力,又避免了前倾旋翼造成的“降力”。为了进一步减轻旋翼的负担,直升机还可以安装短翼,在前飞时提供气动升力,这样,对旋翼产生升力的要求可以降到最低,后行桨叶失速也就不成为问题,消除了直升机速度上不去的一大障碍。
很多常规直升机并没有专用的推进发动机,但安装了短翼,就是为了在前飞中产生升力,减低对旋翼升力的依赖,以提高前飞速度。对于攻击直升机来说,短翼还是提供武器挂架的好地方。采用短翼的典型直升机有米-6、AH-64 等,米-24 的短翼也有提供升力的作用,但最主要的目的却是加强横滚稳定性。就像世上所有的好事一样,没有免费的午餐。短翼不光增加结构重量,最大的问题是遮挡旋翼的下洗气流,削弱了旋翼的效率。所以强调悬停和直升机特有的非常规机动性能的直升机常常不选用短翼,即使采用短翼,也使短翼有较大的下反,以减小对旋翼下洗气流的不利遮挡。有人把这种采用短翼的直升机也称为复合直升机,因为升力的产生已经不再单纯依靠旋翼,但通常人们还是把升力和推力两者都不再依靠旋翼的直升机称为复合直升机。
米-6的短翼用于在平飞时产生升力,为旋翼卸载 / AH-64 的短翼同时兼作武器挂架,一物两用
卡莫夫 Ka-22 是早期复合直升机的一个典范,曾创造多项速度和载重记录 / MBB 的 BBH 攻击直升机,采用常规的“开放”推进螺旋桨作推动力,计划被取消后,转入和法国合作发展“虎”式直升机
[ 此贴被EEE网情深在2006-11-25 23:34重新编辑 ]
西科斯基 S-66,和洛克希德 AH-56“夏延”竞争落败,但速度比“夏延”更快,号称世界第一。S-66 的尾部螺旋浆可以转向,向后做推进用,向左作反扭力用,而不像“
夏延
”那样,用两个专用的推进螺旋桨和反扭力尾桨 50-60 年代时,采用单独的推力发动机的复合直升机方案如雨后春笋,有不少达到试飞阶段,其中 Piasecki 的 16H 是其中的佼佼者。Piasecki 16H 采用一个尾置的涵道螺旋桨提供推力,涵道螺旋桨后有控制舵面,利用后洗气流提供偏航和俯仰控制。主旋翼依然保留周期距控制,用于悬停或非常规机动时提供控制。Piasecki 的方案在 60 年代没有引起足够的兴趣,但是在 90 年代,重新引起美国军方的兴趣。Piasecki 将 16H 的概念用在 UH-60 上,试制了所谓“速度鹰”(Speed Hawk),不仅提高了速度,还将航程提高了 3 倍,使“速度鹰”的航程和 F-18 战斗机相当,用作海军的搜索救援直升机十分有利。同样的概念还用在 AH-64“阿帕奇”攻击直升机上,速度提高 25%。环形尾的问题主要有两个:环形尾套件增加重量,“速度鹰”比基型的 UH-60 要重 800 公斤。另一个问题是即以对旋翼下洗气流的遮挡减低旋翼效率,旋翼功率要增加,否则悬停性能要受到损失。
Piasecki 16H 采用尾置涵道螺旋桨(也称“环形尾”,ringtail)作为平飞的推进器,短翼提供平飞升力,将旋翼“解放”出来,大大提高平飞速度,也大大降低机械振动和疲劳
“速度鹰” (Speed Hawk),这是 Piasecki 用 UH-60 的机体和主要机械系统作基础,研制的“推力转向涵道推进”(Variable Thrust Duct Propeller)研究机
VTDP 前飞时的状态,略微向前进方向的左侧偏转,反扭力作用部分由气动舵面完成 / VTDP 在悬停时的状态,可伸缩的“斗篷”向左偏转 90 度,加强反扭力作用
Piachecki 也推出了“速度眼镜蛇”和“速度阿帕奇”方案
[url=http://www.mx3g.com/misc.php?action=viewratings&tid=755&pid=1997][/url]
30 年代末,大学刚毕业的 Friedrich von Doblhoff 异想天开,建议在旋翼翼尖上安装法国工程师 Rene Leduk 早年发明的冲压式喷气发动机,驱动旋翼,现在称之为喷气翼尖(tip jet)。发动机驱动旋翼旋转是造成反扭力的原因,即使新奇的方案如“夏延”,依然逃脱不了采用尾桨平衡反扭力的布局。喷气翼尖在桨叶内通过管路向翼尖输送高压压缩空气,压缩空气从翼尖向后喷出,就可以推动桨叶转动。喷气翼尖的极端是直接在旋翼翼尖安装微型喷气发动机,喷气驱动旋翼旋转。由于桨轴不是驱动轴,旋翼转动没有反扭力,所以不需要尾桨。桨叶内输导压缩空气的能力有限,结构也复杂,但发动机可以放在机体内。翼尖喷气发动机的方案在技术上更有诱惑力,燃料在离心力的作用下,可以容易地向翼尖输送,燃烧用的空气也主要由管路输送过来的压缩空气提供,因为在翼尖的发动机进气受圆周运动的影响太大。发动机必须轻小,一般采用结构简单的脉动喷气发动机(pulse jet)或冲压喷气发动机(ram jet)。喷气翼尖的问题是噪声不仅巨大,而且尖厉,有规则,特别烦人。不过最大噪声实际上延续时间不长,只有起飞和着陆的一、两分钟时间,不过这没有能够使环保组织的反对声轻下去。Doblhoff 在战时的研究工作取得了有限的成果,战争结束时,Doblhoff 用卡车拉着样机和资料,和工作人员一起从苏军正在逼近的奥地利往西撤退,最后在德奥边境向美军投降。战后,Doblhoff 和他的样机一起到了美国,Doblhoff 到美国麦克唐纳工作,主持了麦克唐纳 XV-1 的设计,这是美国第一架喷气翼尖的直升机。但与此同时,Doblhoff 的主要结构设计师和试飞员 August Stepan 去了英国,日后成为 Fairey Rotodyne 的主要设计人之一。然而,喷气翼尖、推进发动机和固定的机翼相结合,有效地将直升机、旋翼机和固定翼飞机的优点结合起来。
Hiller 应该说是喷气翼尖的另一个先驱,在 50 年就推出了 HOE-1 研究直升机
麦克唐纳在从德国“俘虏”过来的喷气翼尖鼻祖 Feiedrich von Doblhoff 的主持下,在 50 年代研制了 XV-1 研究直升机,除采用喷气翼尖外,还在机身尾部单独采用推进螺旋桨提供推力,尾撑顶端的小型螺旋桨用于方向控制
最著名的采用喷气翼尖的旋翼-直升机要数英国 Fairey 的 Rotodyne。60 年代城际交通迅速发展,短途航空旅行的诱惑力日增,但固定翼飞机需要远离城市的机场的问题,始终限制了短途航空旅行的发展,很多垂直-短距起落飞机的方案应运而生。城际中短途空运不要求悬停或非常规机动性能,垂直/短距起落能力更为重要,所以旋翼-直升机具有相当的吸引力。Fairey Rotodyne 用喷气翼尖实现垂直起落,用旋翼的周期距控制俯仰和横滚,翼下双发差动推力控制在直升机状态下的方向,在平飞阶段,气动舵面辅助飞行控制。机翼在平飞阶段产生一半以上的升力,旋翼 的桨距减到最低,靠空气动力自旋,以减小阻力。Fairey Rotodyne 在试飞期间,创造了伦敦市中心到巴黎市中心的速度记录。旋翼-直升机的无滑跑倾斜起飞和准垂直降落,不仅极大地降低了对机场跑道和净空的要求,也由于起落空间不重叠,实际上增加了同等机场空间内起落架次的容量。由于噪声、资金和 60 年代初英国航空工业的全面重组,Fairey 被 Westland 收购,Westland 把重点转移到以引进的西科斯基技术为基础的常规直升机的研制上,Fairey Rotodyne 下马了,所有资料和工具被销毁,样机被肢解,至今还有不少人惋惜。进入 21 世纪,喷气翼尖又有死灰复燃的迹象。美国 Groen Brothers 提出用喷气翼尖驱动旋翼,研制 C-130 一级的大型旋翼-直升机,作为战场空运的主力,满足从 CH-47 到 C-130 之间的战术空运需要。Groen Bothers 方案最大的诱惑在于,这个改装思路可以用于任何现成的上单翼运输机,比如 C-130。旋翼的支点在上单翼和机身的结合部,可以最大限度地减小对飞机重心和气动特性的影响,理论上可以以比重型直升机或倾转旋翼飞机低得多的代价,开发具有垂直起落能力的大型飞机。如果不强调悬停和非常规机动的话,旋翼-直升机的魅力确实是很大的。
采用喷气翼尖最著名的还是 Fairey Rotodyne,本来是很有潜力成为中短途城市航运的主力的
Fairey Rotodyne 在飞行中的雄姿 / Rotodyne 在一开始接到很多航空公司的意向订货,但英国的“国航”BAE 最终没有下订单,别的意向订货也在一夜之间蒸发了,堪称是“协和”式的前奏
Fairey 被 Westland 收购后,由于英国政府资金不足,英国空军和英国“国航”的订单不到位,在成功的试飞后下马了,设计资料、工具、样机全部销毁,今天只能在画上自慰了
美国的 Groen Brother 公司是旋翼机的最新热衷者,Groen Brothers 向美国军方建议,用 C-130 一级的机身,配以带喷气翼尖的旋翼系统,实现垂直起落
Groen 还想诱惑海军,用作航母上的运输机 / Groen Brothers 也在向森林灭火部门推销这个方案
[ 此贴被EEE网情深在2006-11-25 23:37重新编辑 ]
限制直升机速度的一个重要因素是旋翼桨叶的挥舞,桨叶的惯性在不断地挥舞中增加了机械振动,铰链的磨损(或弹性元件的疲劳)使直升机的可靠性总是不如固定翼飞机。常规直升机的柔性桨叶虽然是非常规机动成为可能,但柔性的桨叶也限制了直升机的机动性,难于像固定翼飞机一样做迅猛的滚翻、拉起、俯冲、盘旋动作,过于激烈的机动动作可能使桨叶和机体碰撞,严重危害飞行安全。刚性桨叶的限制要小得多,采用刚性桨叶的直升机或许有这样、那样的问题,但都具有比常规直升机远为出色的机动性。为此,刚性桨叶一直是直升机研究的一个目标。洛克希德“夏延”的下马给刚性桨叶的发展蒙上阴影,但刚性桨叶的研究并没有就此偃旗息鼓,近来又柳暗花明的迹象。 为了大幅度提高直升机性能,美国从 70 年代开始,进行了一系列直升机研究机项目。西科斯基的“前行桨叶概念”(Advancing Blade Concept,简称 ABC)在较早就获得成功。如前所述,刚性旋翼的一个大问题是由于前飞的相对速度叠加在旋翼旋转速度引起的非对称升力,但对于刚性的共轴反转双桨来说,两边的非对称升力叠加起来,就对称了,刚性的桨叶和桨轴吸收所有的扭力,这就是 ABC 可以免去挥舞铰的基本思路。由于刚性桨叶没有挥舞,上下旋翼可以离得很近,而没有碰撞的危险。差动式地加减上下旋翼的桨距以形成扭力差不仅形成水平方向上的转向,还由于刚性旋翼非对称升力造成横滚,进一步加速转弯过程,所以 ABC 具有异乎寻常的机动性,大大超过常规直升机。ABC 直升机有专用的推进发动机,高速平飞时,用气动舵面实现飞行控制。采用 ABC 的 S-69(军用代号 XH-59A)参加了 LHX 竞争,但技术终究不够成熟,在悬停中低头或抬头也比较困难,落选于同出于西科斯基的常规旋翼加涵道尾桨的方案,后者最终成为 RAH-66“科曼奇”,现在也下马了。

西科斯基 XH-59A“前行桨叶”概念研究机,用共轴反转的刚性旋翼,既抵消扭力,又抵消非对称升力
流线型的 S-69 蛮俊俏的
前行桨叶在无人机的大潮中得到复苏,西科斯基的 Mariner/Cypher II 将前行桨叶和涵道风扇结合起来,动力从“碗边”通过传动轴传递,可以分别传递给上下旋翼,而不必用套筒轴驱动,大大简化机械设计和制造。理论上涵道可以改变气流方向,解决后行桨叶失速(retreating blade stall)问题,提高直升机速度。但涵道本身增加重量,更是增加迎风阻力,如果像 Mariner 那样开在中机身,还妨碍机内载荷和设备的布置。西科斯基在 Mariner 上使用前行桨叶,与其说是为了速度,不如说是为了减小旋翼直径。涵道的采用和和后行桨叶失速没有太大关系,主要是无人机整体布置上的方便,涵道结构本身容纳发动机和机载设备,加上涵道有良好的侧向隔音作用,特别有利于巷战或特种作战使用。

西科斯基的 Mariner/Cypher II,是美国海军无人机竟标中的候选之一 / Mariner/Cypher II 的前身 Cypher 在美国陆军本宁堡步兵学校的演习场作巷战演示
作为美国直升机工业的龙头老大,西科斯基在 80 年代和国防部和 NASA 合作,研制了所谓 X 形翼研究机,其基本思路是在直升机和固定翼飞机之间架一座桥,机顶的 X 形机翼可以在直升机状态下旋转,产生升力;前飞达到一定速度后,X 形翼锁住固定,作为机翼使用,飞机转入固定翼状态。X 形翼在气动上虽然少见,但并非不可思议,这就是一对后掠翼加一对前掠翼。直升机状态下,反扭力问题有尾桨解决,比较难的是采用刚性的单旋翼,如何解决非对称升力的问题。西科斯基采用独特的“环流控制技术”(Circulation Control Technology),将发动机压缩机后引出高压气流,通过宽大的桨叶内的管路,像吹气襟翼一样,向桨叶后缘开缝襟翼吹气。吹气襟翼在下垂的襟翼表面喷吹高压空气,加速机翼上表面的气流流动,使机翼达到超过实际空速下能够产生的升力,50-60 年代第一代超音速战斗机的低速性能就是靠吹气襟翼“救命”的。环流控制桨叶根据桨叶在圆周运动中的不同位置,控制开缝宽度和吹气强度,控制升力的增减,以补偿非对称升力。
西科斯基的 X 翼研究机将宽弦“桨叶”和机翼合二为一,在直升机状态作旋翼旋转,在固定翼状态固定,作为 X 形机翼,在直升机和固定翼之间架桥 / 用普通直升机旋翼先行试验的西科斯基“旋翼系统研究机”(Rotor System Research Aircraft,简称 RSRA)

按固定翼飞机试飞的 RSRA,可以看到,RSRA 用机翼就可以产生足够的升力,并不需要 X 形翼的额外升力
90 年代时,波音接过接力棒,将 X 形翼的概念推向新的高度,用麦道直升机和 NASA 的合作结果,研制了“蜻蜓”(Dragonfly)研究机。“蜻蜓”有鸭式前翼和宽大的水平尾翼,机顶上有一字形的旋翼-机翼。在直升机状态下,旋翼-机翼在喷气翼尖的作用下旋转,产生升力。一字形的旋翼-机翼相当于双叶旋翼,可以用跷跷板铰链完成挥舞和领先-滞后动作,所以“蜻蜓”对非对称升力的补偿还是常规的。“蜻蜓”的动力装置是一台涡扇发动机,从压缩机引出高压气流,通过管路输送到旋翼-机翼的翼尖,驱动喷气翼尖。由于喷气翼尖不产生反扭力,“蜻蜓”没有尾桨。达到一定的平飞速度后,鸭翼和平尾产生足够的升力,旋翼-机翼锁住,作为固定的机翼,飞机转入固定翼状态。“蜻蜓”正在试飞,美国军方对它寄予厚望,甚至有想法把它放大到载人攻击直升机。
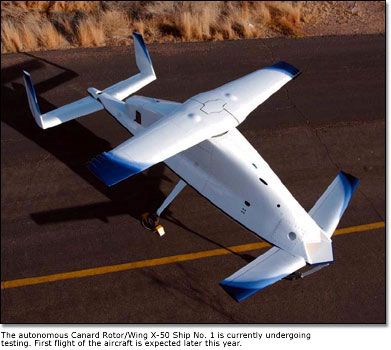
波音的“蜻蜓”Dragonfly 研究机

“蜻蜓”在悬停中

这张三视图清楚地显示了旋翼-机翼的两重性
“蜻蜓”垂直起飞到平飞的过程

“蜻蜓”的鸭翼-旋翼(canard rotor wing)概念对海军很有吸引力,海军有将其开发成舰载无人机的打算 / 载人的“蜻蜓”长满牙齿,蛮凶的
X 形翼到“蜻蜓”有一个共同的特点:采用宽弦刚性桨毂可锁定的两用旋翼-机翼(所谓stopped rotor)。粗短宽厚的刚性旋转机翼从根本上解决了很多细长的柔性旋翼桨叶难以解决的问题,但是和常规直升机相比,这些飞机的悬停和非常规机动性能还是受到一点损失的,正可谓有得必有失。最主要的技术困难还是来自于升力产生机制转换期间的飞行控制问题,处理不好,就容易失事。事实上,所有在升力产生机制中转换的所谓 convertiplane 都有这个机制转换期间的控制问题,机制转换动辄几十秒,快的也要 10 秒,就是不敢动作太猛,怕失控,同时也有速度和高度的限制,不是随时随地想转换就可以转换的。在战斗中,这个转换时间和高度、速度的要求给战术动作带来很大的困扰,升力机制的转换只好在进入战斗前完成,使 convertiplane 在实用中的吸引力受到不小的损失。
“蜻蜓”的鸭式布局为旋翼和机翼的关系提供了一个新思路。机翼可以在平飞中为旋翼卸载,但机翼对旋翼的下洗气流造成遮挡也是不争的事实,鸭式布局把机翼和旋翼的位置错开来,互不遮挡,如果没有胃口直接上两用旋翼-机翼,将“蜻蜓”的鸭式布局、Piasecki 的涵道螺旋桨和 S-69 的 ABC 桨叶结合起来,在技术上没有太了不起的困难,但可以成就一架相当先进的直升机,如果没有胃口直接上这样布局的载人直升机,至少可以从无人直升机开始。从复合直升机,到直升-旋翼机,到可锁定的旋翼-机翼,这是一条从直升机向固定翼飞机过渡的路径。与此对应,当然也有一条从固定翼飞机向直升机过渡的路径。如果能使固定翼飞机的推进装置改变方向,不就能实现垂直起落了吗? 贝尔的 XV-3 是采用倾转动力的固定翼飞机的先驱之一。XV-3 的处在翼尖的发动机是固定的,但驱动旋翼的桨轴可以倾转,所以叫倾转轴(tile shaft)。平飞时,旋翼向螺旋桨飞机一样驱动飞机,垂直起落和悬停时,旋翼通过桨轴向上偏转 90 度。为了保持直升机状态的飞行控制,XV-3 的旋翼是和直升机一样的柔性旋翼,具有全套的总距和周期距控制。XV-3 的动力不足,无法在超出地面效应的高度悬停,作为直升机的功效有限,但 XV-3 证明了将直升机和固定翼飞机结合起来的可能性,为贝尔日后争取到 XV-15 乃至 V-22 的合同至关重要。

以固定翼状态飞行的贝尔的 XV-3,发动机不转动,旋翼的驱动轴转动,所以称 tilt shaft,日后成为 V-22 的重要先驱 / 以直升机状态飞行的 XV-3
XV-3 在悬停状态,由于功率不足,XV-3 不能在超出地面效应以上的高度悬停 / 与贝尔 XV-3 竞争落选的 Transcendental 1G,这是由从 Piasecki 分出来的一批人设计的
XV-3 从直升机状态向固定翼飞机状态转换的过程


和贝尔 XV-3 的技术相似,Transcendental 1G 也是采用倾转轴 / Vertol(以 CH-46、CH-47 出名,后为波音收购)XV-21,同样是 Tilt Shaft
贝尔对柔性桨叶的局限清楚得很,在 70 年代,以 XV-3 的研究结果为基础,和 NASA 和美国军方合作,研制了采用半刚性桨叶的 XV-15。XV-15 的发动机舱和旋翼一起倾转,所以成倾转旋翼(tilt rotor)。半刚性桨叶可算是贝尔的看家本领了,当年红透直升机世界半边天的 UH-1,就是采用半刚性的双叶旋翼,桨叶和桨毂刚性连接,但桨毂和桨轴通过跷跷板轴承柔性连接,利用前行侧桨叶的自然升起和滞后,带动后行侧桨叶的自然降落和超前。很神妙的设计,可惜只能用于双叶旋翼。贝尔将跷跷板的原理推广到三叶(理论上也可以更多片桨叶),估计就是在万向接头外包覆一个刚性的整流罩,所有桨叶和整流罩刚性连接。
桨叶和桨毂的经典的分立铰链式连接,挥舞铰、摆振铰“五毒俱全” / 紧凑一点的重合式铰链连接
双叶桨叶特有的跷跷板式连接,省却了挥舞铰和摆振铰,贝尔的经典之作 UH-1 和 AH-1 就是用这种结构 / 从跷跷板进一步发展而来的万向接头式连接,估计贝尔的半刚性旋翼就是在万向接头外包覆一个刚性的整流罩
贝尔的半刚性旋翼保留了直升机的总距和周期距控制,用于在悬停或直升机飞行状态时的飞行控制。贝尔还采用了宽弦、大弯度的桨叶,是桨叶最大限度地在前飞时接近常规螺旋桨的特性。XV-15 引起了军方极大的兴趣,飞行试验远远超过简单的悬停、平飞和直升机-固定翼飞机之间的状态转换等概念证明型的试飞科目,而是进入了演习场、两栖登陆舰等接近实战的条件下的试验。美国军方对实验结果相当满意,这直接导致最终的四大军种联合研制的 V-22“鱼鹰”项目。V-22 是历史上第一架也是仅有的一架可以垂直/短距起落的量产型运输机,V-22 故事的细节请看
“鱼鹰”杂谈
。


贝尔 XV-15 在悬停中 / XV-15 在平飞中
XV-15 在起飞
为了尽可能减小迎风阻力,倾转旋翼的旋翼直径应该在不影响直升机状态下的性能的前提下尽可能减小。但较小的旋翼不可能不影响直升机状态的性能,最突出的就是所谓“涡流环”现象。直升机在快速下降过程中,要使旋翼进入自己的下洗气流,或下洗气流造成的涡流,旋翼和周围空气之间的相对气流方向和相对速度出现本质变化,可能出现“打滑”而失去升力,这时候越是增加旋翼功率,打滑越严重,这就是所谓的“涡流环”现象。常规直升机也会出现“涡流环”现象,但小直径的旋翼更容易进入这一状态。V-22 在试飞中几次引人注目的坠机,大多出自这个原因。在悬停或直升机状态时,倾转旋翼在理论上可以通过控制左右发动机的推力来控制横滚,用旋翼的前后转动来控制俯仰,偏航比较难办,可以用旋翼下洗气流作用在机翼的襟翼上,辅以一定的横滚作用来实现。但事实上,增减发动机推力的灵敏度不够,反映不够快,控制量也不够精细。用机电控制倾转旋翼来实现俯仰控制,灵敏度问题更大,无法适应恶劣天气时的飞行要求。实用化的倾转旋翼的 V-22(及其前身 XV-15)都是采用直升机桨叶,即保留了全套直升机的总距和周期距控制,而不是只可以调节桨距的螺旋桨,所以直升机状态的 V-22 的操控和直升机无异。在以螺旋桨-旋翼为基础的垂直/短距起落飞机中,倾转旋翼是最成熟的方案。美国的 V-22 在饱经千难万险之后,终于开始量产。

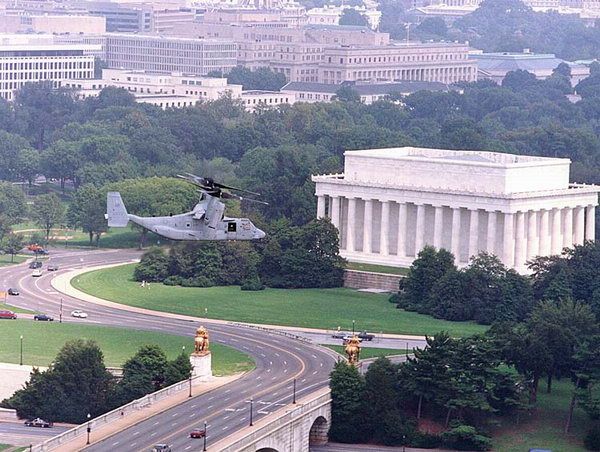
直升机状态前飞中的 V-22 在空投伞兵
西科斯基 XH-59A“前行桨叶”概念研究机,用共轴反转的刚性旋翼,既抵消扭力,又抵消非对称升力
流线型的 S-69 蛮俊俏的
前行桨叶在无人机的大潮中得到复苏,西科斯基的 Mariner/Cypher II 将前行桨叶和涵道风扇结合起来,动力从“碗边”通过传动轴传递,可以分别传递给上下旋翼,而不必用套筒轴驱动,大大简化机械设计和制造。理论上涵道可以改变气流方向,解决后行桨叶失速(retreating blade stall)问题,提高直升机速度。但涵道本身增加重量,更是增加迎风阻力,如果像 Mariner 那样开在中机身,还妨碍机内载荷和设备的布置。西科斯基在 Mariner 上使用前行桨叶,与其说是为了速度,不如说是为了减小旋翼直径。涵道的采用和和后行桨叶失速没有太大关系,主要是无人机整体布置上的方便,涵道结构本身容纳发动机和机载设备,加上涵道有良好的侧向隔音作用,特别有利于巷战或特种作战使用。
西科斯基的 Mariner/Cypher II,是美国海军无人机竟标中的候选之一 / Mariner/Cypher II 的前身 Cypher 在美国陆军本宁堡步兵学校的演习场作巷战演示
作为美国直升机工业的龙头老大,西科斯基在 80 年代和国防部和 NASA 合作,研制了所谓 X 形翼研究机,其基本思路是在直升机和固定翼飞机之间架一座桥,机顶的 X 形机翼可以在直升机状态下旋转,产生升力;前飞达到一定速度后,X 形翼锁住固定,作为机翼使用,飞机转入固定翼状态。X 形翼在气动上虽然少见,但并非不可思议,这就是一对后掠翼加一对前掠翼。直升机状态下,反扭力问题有尾桨解决,比较难的是采用刚性的单旋翼,如何解决非对称升力的问题。西科斯基采用独特的“环流控制技术”(Circulation Control Technology),将发动机压缩机后引出高压气流,通过宽大的桨叶内的管路,像吹气襟翼一样,向桨叶后缘开缝襟翼吹气。吹气襟翼在下垂的襟翼表面喷吹高压空气,加速机翼上表面的气流流动,使机翼达到超过实际空速下能够产生的升力,50-60 年代第一代超音速战斗机的低速性能就是靠吹气襟翼“救命”的。环流控制桨叶根据桨叶在圆周运动中的不同位置,控制开缝宽度和吹气强度,控制升力的增减,以补偿非对称升力。
西科斯基的 X 翼研究机将宽弦“桨叶”和机翼合二为一,在直升机状态作旋翼旋转,在固定翼状态固定,作为 X 形机翼,在直升机和固定翼之间架桥 / 用普通直升机旋翼先行试验的西科斯基“旋翼系统研究机”(Rotor System Research Aircraft,简称 RSRA)
按固定翼飞机试飞的 RSRA,可以看到,RSRA 用机翼就可以产生足够的升力,并不需要 X 形翼的额外升力
90 年代时,波音接过接力棒,将 X 形翼的概念推向新的高度,用麦道直升机和 NASA 的合作结果,研制了“蜻蜓”(Dragonfly)研究机。“蜻蜓”有鸭式前翼和宽大的水平尾翼,机顶上有一字形的旋翼-机翼。在直升机状态下,旋翼-机翼在喷气翼尖的作用下旋转,产生升力。一字形的旋翼-机翼相当于双叶旋翼,可以用跷跷板铰链完成挥舞和领先-滞后动作,所以“蜻蜓”对非对称升力的补偿还是常规的。“蜻蜓”的动力装置是一台涡扇发动机,从压缩机引出高压气流,通过管路输送到旋翼-机翼的翼尖,驱动喷气翼尖。由于喷气翼尖不产生反扭力,“蜻蜓”没有尾桨。达到一定的平飞速度后,鸭翼和平尾产生足够的升力,旋翼-机翼锁住,作为固定的机翼,飞机转入固定翼状态。“蜻蜓”正在试飞,美国军方对它寄予厚望,甚至有想法把它放大到载人攻击直升机。
波音的“蜻蜓”Dragonfly 研究机
“蜻蜓”在悬停中
这张三视图清楚地显示了旋翼-机翼的两重性
“蜻蜓”垂直起飞到平飞的过程
“蜻蜓”的鸭翼-旋翼(canard rotor wing)概念对海军很有吸引力,海军有将其开发成舰载无人机的打算 / 载人的“蜻蜓”长满牙齿,蛮凶的
X 形翼到“蜻蜓”有一个共同的特点:采用宽弦刚性桨毂可锁定的两用旋翼-机翼(所谓stopped rotor)。粗短宽厚的刚性旋转机翼从根本上解决了很多细长的柔性旋翼桨叶难以解决的问题,但是和常规直升机相比,这些飞机的悬停和非常规机动性能还是受到一点损失的,正可谓有得必有失。最主要的技术困难还是来自于升力产生机制转换期间的飞行控制问题,处理不好,就容易失事。事实上,所有在升力产生机制中转换的所谓 convertiplane 都有这个机制转换期间的控制问题,机制转换动辄几十秒,快的也要 10 秒,就是不敢动作太猛,怕失控,同时也有速度和高度的限制,不是随时随地想转换就可以转换的。在战斗中,这个转换时间和高度、速度的要求给战术动作带来很大的困扰,升力机制的转换只好在进入战斗前完成,使 convertiplane 在实用中的吸引力受到不小的损失。
“蜻蜓”的鸭式布局为旋翼和机翼的关系提供了一个新思路。机翼可以在平飞中为旋翼卸载,但机翼对旋翼的下洗气流造成遮挡也是不争的事实,鸭式布局把机翼和旋翼的位置错开来,互不遮挡,如果没有胃口直接上两用旋翼-机翼,将“蜻蜓”的鸭式布局、Piasecki 的涵道螺旋桨和 S-69 的 ABC 桨叶结合起来,在技术上没有太了不起的困难,但可以成就一架相当先进的直升机,如果没有胃口直接上这样布局的载人直升机,至少可以从无人直升机开始。从复合直升机,到直升-旋翼机,到可锁定的旋翼-机翼,这是一条从直升机向固定翼飞机过渡的路径。与此对应,当然也有一条从固定翼飞机向直升机过渡的路径。如果能使固定翼飞机的推进装置改变方向,不就能实现垂直起落了吗? 贝尔的 XV-3 是采用倾转动力的固定翼飞机的先驱之一。XV-3 的处在翼尖的发动机是固定的,但驱动旋翼的桨轴可以倾转,所以叫倾转轴(tile shaft)。平飞时,旋翼向螺旋桨飞机一样驱动飞机,垂直起落和悬停时,旋翼通过桨轴向上偏转 90 度。为了保持直升机状态的飞行控制,XV-3 的旋翼是和直升机一样的柔性旋翼,具有全套的总距和周期距控制。XV-3 的动力不足,无法在超出地面效应的高度悬停,作为直升机的功效有限,但 XV-3 证明了将直升机和固定翼飞机结合起来的可能性,为贝尔日后争取到 XV-15 乃至 V-22 的合同至关重要。
以固定翼状态飞行的贝尔的 XV-3,发动机不转动,旋翼的驱动轴转动,所以称 tilt shaft,日后成为 V-22 的重要先驱 / 以直升机状态飞行的 XV-3
XV-3 在悬停状态,由于功率不足,XV-3 不能在超出地面效应以上的高度悬停 / 与贝尔 XV-3 竞争落选的 Transcendental 1G,这是由从 Piasecki 分出来的一批人设计的
XV-3 从直升机状态向固定翼飞机状态转换的过程
和贝尔 XV-3 的技术相似,Transcendental 1G 也是采用倾转轴 / Vertol(以 CH-46、CH-47 出名,后为波音收购)XV-21,同样是 Tilt Shaft
贝尔对柔性桨叶的局限清楚得很,在 70 年代,以 XV-3 的研究结果为基础,和 NASA 和美国军方合作,研制了采用半刚性桨叶的 XV-15。XV-15 的发动机舱和旋翼一起倾转,所以成倾转旋翼(tilt rotor)。半刚性桨叶可算是贝尔的看家本领了,当年红透直升机世界半边天的 UH-1,就是采用半刚性的双叶旋翼,桨叶和桨毂刚性连接,但桨毂和桨轴通过跷跷板轴承柔性连接,利用前行侧桨叶的自然升起和滞后,带动后行侧桨叶的自然降落和超前。很神妙的设计,可惜只能用于双叶旋翼。贝尔将跷跷板的原理推广到三叶(理论上也可以更多片桨叶),估计就是在万向接头外包覆一个刚性的整流罩,所有桨叶和整流罩刚性连接。
桨叶和桨毂的经典的分立铰链式连接,挥舞铰、摆振铰“五毒俱全” / 紧凑一点的重合式铰链连接
双叶桨叶特有的跷跷板式连接,省却了挥舞铰和摆振铰,贝尔的经典之作 UH-1 和 AH-1 就是用这种结构 / 从跷跷板进一步发展而来的万向接头式连接,估计贝尔的半刚性旋翼就是在万向接头外包覆一个刚性的整流罩
贝尔的半刚性旋翼保留了直升机的总距和周期距控制,用于在悬停或直升机飞行状态时的飞行控制。贝尔还采用了宽弦、大弯度的桨叶,是桨叶最大限度地在前飞时接近常规螺旋桨的特性。XV-15 引起了军方极大的兴趣,飞行试验远远超过简单的悬停、平飞和直升机-固定翼飞机之间的状态转换等概念证明型的试飞科目,而是进入了演习场、两栖登陆舰等接近实战的条件下的试验。美国军方对实验结果相当满意,这直接导致最终的四大军种联合研制的 V-22“鱼鹰”项目。V-22 是历史上第一架也是仅有的一架可以垂直/短距起落的量产型运输机,V-22 故事的细节请看
“鱼鹰”杂谈
。
贝尔 XV-15 在悬停中 / XV-15 在平飞中
XV-15 在起飞
为了尽可能减小迎风阻力,倾转旋翼的旋翼直径应该在不影响直升机状态下的性能的前提下尽可能减小。但较小的旋翼不可能不影响直升机状态的性能,最突出的就是所谓“涡流环”现象。直升机在快速下降过程中,要使旋翼进入自己的下洗气流,或下洗气流造成的涡流,旋翼和周围空气之间的相对气流方向和相对速度出现本质变化,可能出现“打滑”而失去升力,这时候越是增加旋翼功率,打滑越严重,这就是所谓的“涡流环”现象。常规直升机也会出现“涡流环”现象,但小直径的旋翼更容易进入这一状态。V-22 在试飞中几次引人注目的坠机,大多出自这个原因。在悬停或直升机状态时,倾转旋翼在理论上可以通过控制左右发动机的推力来控制横滚,用旋翼的前后转动来控制俯仰,偏航比较难办,可以用旋翼下洗气流作用在机翼的襟翼上,辅以一定的横滚作用来实现。但事实上,增减发动机推力的灵敏度不够,反映不够快,控制量也不够精细。用机电控制倾转旋翼来实现俯仰控制,灵敏度问题更大,无法适应恶劣天气时的飞行要求。实用化的倾转旋翼的 V-22(及其前身 XV-15)都是采用直升机桨叶,即保留了全套直升机的总距和周期距控制,而不是只可以调节桨距的螺旋桨,所以直升机状态的 V-22 的操控和直升机无异。在以螺旋桨-旋翼为基础的垂直/短距起落飞机中,倾转旋翼是最成熟的方案。美国的 V-22 在饱经千难万险之后,终于开始量产。
直升机状态前飞中的 V-22 在空投伞兵
V-22 的半刚性旋翼清晰可见 / V-22 的宽弦、大弯度、无铰、无轴承桨叶清晰可见
起飞、着陆时,襟翼放下,最大限度地减小对下洗气流的遮挡 / 为了适合上舰的需要,V-22 的旋翼可以折叠,机翼还可以横转90度,和机体平行,以节约占地空间
V-22 着舰试验,一侧旋翼在甲板上空、一侧旋翼在舷外时,两侧升力不均匀,容易造成事故。一架接一架紧接着快速降落时,前面飞机造成的空气涡流容易使后面的飞机进入危险的“涡流环”状态(vortex ring),造成旋翼吃不上劲,导致坠机 / 这是在两栖登陆建“塞班”号机舱内的情景
V-22 的性能被说得如此出众,人们不禁疑惑,为什么总统的“海军陆战队一号”要选新机时,没有选 V-22?
贝尔在 V-22 的成功之后,向两条战线出击,一是将倾转旋翼技术用于无人机,以最大限度地利用其垂直起落和速度、航程上的优势,二是将倾转旋翼技术推向民航市场。早先雄心勃勃的中短程支线客机看来一时还难以实现,但小型公务机已经开始了,贝尔和意大利的 Agusta 合作,正在研制 BA-609,其垂直起落的能力和速度、航程将对大公司、政府机构的要员从城市中心到城市中心的空中旅行有很大的诱惑力。欧洲从 80-90 年代开始,也展开了倾转旋翼的研究。法、德合作的 Eurotilt 和英、意合作的 Eurofar 最后合并成一个计划,但在 V-22 和 BA-609 面临一系列技术困难后,速度放慢,估计现在处于观望状态,在等待倾转旋翼的技术进一步成熟、技术风险进一步降低后再行动。
BA-609 的 BA 代表 Bell Agusta,将成为倾转旋翼在民用领域里“吃螃蟹的人” / BA-609 是面对有钱的阔佬的
BA-609 在警方和海岸警卫队中也有望得到青睐 / BA-609 已经试飞,正在欧洲大力推销,力图抢在欧洲公司的前面霸占市场
法国主导的 Eurotilt 倾转旋翼飞机方案
Eurotilt 的倾转和 V-22 稍有不同,只有发动机前半部分倾转,介于 tilt rotor 和 tilt shaft 之间
贝尔当然不会把倾转旋翼的概念只用在载人飞机上,在如火如荼的无人机领域,贝尔也推出了采用倾转旋翼的“鹰眼”(Eagle Eye) / “鹰眼”预计要和海军或海岸警卫队的舰船配合行动,所以有很高的上舰要求
尽管 V-22 在研制过程中遇到严重的问题,美国军方对用具有垂直/短距起落能力的运输机作为战术空运主力的概念依然不肯放弃,在 V-22 尚未大规模服役时,已经开始对更大型垂直/短距起落运输机的研制,贝尔的方案自然是 V-22 的延伸:采用四旋翼的倾转旋翼方案,即所谓 quad tilt rotor。值得注意的是,倾转旋翼的发动机通常都是成双布置的。除非在机顶重心处安装一根很高的桅杆,倾转旋翼基本不可能是单旋翼的。
贝尔提出的四旋翼倾转旋翼(Quad Tilt Rotor,简称 QTR)方案,用于担当美军战场空运的主力 / 媒体为新飞机的名字都想好了:V-44,尽管军方并没有这样的命名
四旋翼尽管顺理成章,但平飞时前后旋翼之间相互之间的气动干扰可能会很严重,尤其是机动飞行的时候,后发动机也要避开前发动机的尾流 / QTR 可以用于在城市中心机降“重型部队”(相对空降兵来说)
QTR 的结构想象图,传动轴不仅要左右同步,前后也要同步,复杂性和重量肯定要增加
QTR 是和 Groen Brothers 的 Gyrolifter 竞争,当然也不会忘了海军型 / 四旋翼倾转旋翼运输机的另一个方案
NASA 还在研究更大型的 QTR,用于民航
螺旋桨可以看成小直径、宽弦、大弯度的刚性旋翼,除了桨距以外,没有挥舞铰、摆振铰之类的,只是螺旋桨一般比刚性旋翼的直径小一点就是了。不过直径小,对减小前飞阻力具有不可置疑的好处。只要能够满足垂直起落要求,用螺旋桨代替旋翼是倾转旋翼的一个自然的延伸,Curtis-Wright 就是这方面的先驱。Curtiss-Wright 是航空先驱 Glenn Curtiss 和 Wright 兄弟的公司合并的结果,50 年代时已经落后于喷气时代,但在螺旋桨领域还是一方好汉。倾转的螺旋桨称为 tilt prop。螺旋桨需要较高的转速才能产生足够的推力,这对小直径刚性的桨叶不成问题。不过 Curtiss-Wright 的研究机没有发展到 V-22 的阶段,估计快速下降时,会有更严重的“涡流环”问题。但是 Curtiss-Wright 的螺旋桨还有玄机在里面。普通螺旋桨是针对迎面气流的,如果把螺旋桨略微向上倾斜一点,下行的桨叶相对迎面气流的迎角增加,上行桨叶的迎角减小,这样下行桨叶产生向下的划动大于上行桨叶产生向上的划动,产生所谓“轴向升力”(radial lift),可以减小机翼面积,有螺旋桨产生部分升力。这里要注意的是,螺旋桨抬起来一点,倾泻的推理矢量本身就产生一点向下的升力分量,但轴向升力比这点升力分量要大很多。为了最大限度地实现轴向升力,螺旋桨的桨叶应该是宽弦、大弯度的。Curtiss-Wright 先研制 X-100 研究机,特意设计了出奇地小的机翼,以证明轴向升力的概念。不过要是现垂直起落,还是要老老实实把发动机竖起来,推力朝下。在向军方游说假如下面还要提到的三军联合直升机计划后,空军同意投资,这以后Curtiss-Wright 在已经部分完成的 M-200 试验机基础上,大规模展开四发动机的 X-19 的研制,采用四个角落的四台发动机的差动升力控制横滚和俯仰姿态,螺旋桨的差动扭力控制偏航。试飞中,控制反应不够灵敏,控制力矩不足,但机械可靠性是最大的问题,主齿轮箱的寿命只有 50 小时,发动机的倾转机构只有 15 小时的寿命。在 50 个起落的试飞中,留空时间一共只有 4 小时,计划在 4 个月后放弃了。
Curtiss Wright X-100 是 X-19 的先驱,只有两台发动机,采用导至机尾的发动机废气喷管提供姿态控制,效果不好
Curtiss Wright X-19,预计用作小型公务机或短程客机,但飞行控制问题没法很好地解决
Curtiss Wright X-19 在悬停中,前后左右的四台发动机用于悬停中的姿态控制。为了避免陀螺力矩,左前、右后和左后、右前的发动机交联
由于螺旋桨比直升机旋翼简单、可靠,平飞速度高,美国军方对 X-19 寄予很大的希望,空军、海军、陆军三军联合研制,这是“三军攻击运输机计划”(Tri-Service Assault Transport)的一部分。
倾转旋翼是倾转动力方案中最容易想到的,倾转螺旋桨可以算倾转旋翼的一个分支,但倾转旋翼在直升机状态时,机翼对旋翼的下洗气流的遮挡较大,而直升机状态是最需要把所有的推力全部发挥出来的时候。另外,由于旋翼和机翼的相对位置和角度的变化,旋翼-机翼的气动相互作用十分复杂,在至关重要的直升机-固定翼状态转换期间尤其如此。既然如此,何不换一个思路,将发动机固定安装在机翼上,而让机翼倾转呢?倾转机翼(tilt wing)的好处是较好地解决了下洗气流的遮挡问题和发动机-机翼的相互作用问题。但是世上没有免费的午餐。倾转机翼要倾转整个机翼,由于机翼是飞机产生升力的所在,而机体是承重的所在,机翼和机体连接部是飞机上最吃重的部位,现在这个最吃重的部位把所有应力全部集中到一个控制机翼倾转的铰链上,要保证最大的可靠性,机械设计上的难度可想而知。和倾转旋翼一样,理论上倾转机翼可以通过前后倾转机翼来实现俯仰控制,控制左右发动机的推力来实现横滚控制,用下洗气流作用在襟翼上来实现偏航控制,但倾转机翼太不灵敏,所以有时在机尾增加一个水平风扇,专门用于俯仰控制。这个水平风扇只在垂直起落和悬停状态时打开,在平飞状态时折起以减小阻力,在地面也折起,不妨碍使用尾门装卸人员和货物。由于在直升机状态下必须保证所有旋翼/螺旋桨的绝对同步,所有旋翼/螺旋桨之间必须用同步轴连接,但是机翼不是绝对刚性的,在气动力的作用下,总是有一定的挥舞,这样一来,机翼内的同步轴非常容易受到损坏,这是倾转机翼和倾转旋翼共有的一个问题。

Vertol 76(也称 VZ-2)是倾转机翼的早期尝试之一 / 由于整个机翼可以倾转,VZ-2 的平飞和普通固定翼飞机无异


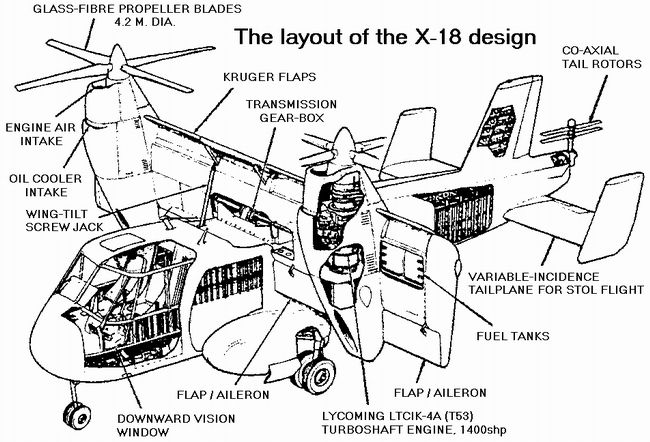
但在机翼竖起来时,发动机推力向下,产生直接升力,而且机翼对发动机的下洗气流的遮挡很小 / 早期直升机界很活跃的 Hiller 也推出了 X-18 研究机,图中为地面演示机翼的倾转
除了倾转机翼的机构外,倾转机翼的机械结构相对简单,发动机刚性固定在机翼上,发动机气流和机翼的设计也相对简单
不知道是不是处于习惯的原因,直升机出身的公司大多走倾转旋翼的路子,固定翼出身的公司大多走倾转机翼的路子。50 年代初,美国军方资助了很多垂直起落的研究项目,但基本上都是概念研究,离实战使用相差很远。59 年军方根据一个咨询委员会的建议,启动一项旨在实用化的垂直起落飞机计划,特别要检验新飞机在实战条件下的,而且要适合三军(海军陆战队在 50 年代没有独立的采购计划,由海军代办)的需要,所以产生了三军联合的 XC-142 计划,LTV 的 Vought 分 部得标,Hiller 和 Ryan 作为主要次级承包商,计划由空军主持。XC-142 可以装载 32 名士兵,比 30 年后的 V-22 还多 40%,四台发动机和 5 个螺旋桨(4 个推进螺旋桨加一个机尾的姿态控制螺旋桨)全部交联,所以只有还有一台发动机在工作,5 个螺旋桨都会转动,尽管可能动力不足。空军对 XC-142 作了大量的测试,包括空运、空投、沙漠、山地、航母、搜索救援、装载机动车辆等。XC-142 最后还是坏在机械复杂性上,可靠性不够,而且机翼在 35-80 度倾转范围里,机翼像门板一样,受横风影响太大,发动机差动推力的控制不够灵敏。最大的抱怨是机翼倾转过程中,差动的辅翼有横滚控制变为偏航控制,而差动的发动机推力由偏航控制变为横滚控制,这不光是一个操作习惯的改变,还在机翼倾转的过程中,横滚控制和偏航控制交联,要求飞行员作大量复杂的补偿动作,工作量太大,而且机舱内噪音和振动太大,估计和在接近垂直状态而低速前进时,刚性的螺旋桨对非对称升力不作补偿,振动全传到机舱里了。XC-142 在 67 年下马了。


早期倾转机翼发展得最远的还要数 Vought Hiller Ryan 三家合作的 XC-142,美国军方对 XC-142 也寄予深望,空军、陆军和海军联合研制,这是又一个 Tri-Service 项目 / XC-142 起飞到平飞的过程

倾转机翼在垂直起飞和悬停时,竖起的巨大机翼形成“门板”效应,容易受低空阵风影响 / 作短距起飞时,机翼并不倾转到垂直,有趣的是,平尾也同步倾转,充分利用发动机下洗气流在地面造成的反弹,增强地面效应


XC-142 在航母 Bennington 号上着舰试验 / 如果有合适的跑道,当然也可以正常滑跑起飞
加拿大Bombardier CL-84 在试飞中

60 年代德国航空工业专注于垂直/短距起落飞机,MBB 的 Bo-140 是其中一个夭折的方案,其倾转机翼可以清楚地看见,MBB 的全称为 Messerschmitt Bolkow Blohm,包括前 Messerschmitt 和 Bolkow 的人马,Ludwig Bolkow 是第一架实战的喷气式战斗机
Me 262
的总设计师

Bo-140 还打算作为战术运输机,取代 C-160“协同” / 同时期的还有 VFW VC-400,VFW 的全称为 Vereinigte Flugtechnische Werke,包括前 Heinkel 和 Focke-Wulf 的人马
倾转机翼的机械相当复杂,可靠性成问题。早期的 X-18 和 XC-142 用螺杆千斤顶控制机翼的倾转,动作平稳但是迟缓。经过 30 年的冬眠,倾转机翼近来有复苏的迹象。美国空军在寻找 C-130 的替代的过程中,从 AMST 开始,已经放弃了垂直起落的要求,现在只要求短 距起落。波音将倾转机翼的概念用于“先进战区运输机”(Advanced Theater Transport)计划的招标,利用倾转机翼和地面效应相结合产生的增升效果,来达到短距起落。

倾转机翼经过 30 年的冬眠,现在又重新得到重视,这是波音的 147 型倾转机翼公务飞机 / 波音的雄心当然不止于小型公务飞机,波音投标美军“先进战区运输机”(Advanced Theater Transport,简称ATT)的方案就是倾转机翼。ATT只要求短距起落,而不强调垂直起落,不过波音的 ATT 形状怪异,被戏称为“超级大青蛙”(Super Frog)

要是没有心理准备,冷不防看见空中飞来这么一个怪东西,地面的敌人怕是惊得目瞪口呆,放枪也忘记了 / 洛克希德的 ATT 方案就要常规多了,虽然为隐身修形的机翼和 V 形尾比较新颖
洛克希德的另一个 ATT 方案就简直是 F-22 的运输机版了

意大利 Agusta 推出的 ERICA 计划不仅仅是又一个倾转旋翼的方案 ,ERICA 的机翼外翼段倾转,使其介于倾转旋翼和倾转机翼之间,不过现在 ERICA 已经和 Eurotilt 合并了
至此,倾转动力基本上都是在机翼和发动机上动脑筋,Freewing(不知道中文该怎么翻译?)把思路颠一个倒,把机身、机翼固定,但把安装发动机的前机身倾转,或许这应该成为倾转机身?倾转机身,安装在机身上的发动机的推力产生向下的升力分量,产生直接升力。但这只是一部分,推力气流从地面的反射要是利用好的话,可以大大强化升力,Freewing 就是靠直接升力和地面效应极大地增加起飞过程中的升力的。升空后,前后机身拉直,像普通飞机一样飞行。不过 Freewing 很难做到垂直起落,只能短距起落。这在使用中不是那么了不起的一个限制,如果需要滑跑的距离足够短,比如只要十几米,在大部分情况下,还是能够找到合适的场地的。Freewing 也是公司的名字,Freewing 目前只用在无人机上,但 Freewing 的野心不止于无人机,提出的 Freewing 喷气战斗机方案很有点惊世骇俗,把通常 Freewing 的前后机身倒一个个儿,在短促的滑跑后,用气动力把机尾压下去,把机首抬起来,后面的事情就和一般的 Freewing 一样了。

Freewing 是推力转向的一个新思路,机身、机翼固定,但安装发动机的前机身可以抬起来,提供额外的升力分量,缩短起飞距离。不过 Freewing 不可能实现垂直起落

到目前为止,Freewing 只用于无人机,由于前机身在起落时要高高扬起,载人的机舱布置在前机身恐怕有问题,而飞行员坐在后机身又有违传统,看来 Freewing 概念要用到载人飞机还有一段日子

不过人们的想象力是无穷的,如果倒一个个儿,前机身和地面水平,后机身翘起来,水平滑跑一小段距离后,水平尾翼用气动力量把尾巴压下去…… / 这样较重的前机身就抬了起来,可以利用向下的喷气推力分量,增加升力,尾撑之间的水平尾翼还可以“捕获”喷气发动机的下洗气流从地面的反弹,利用地效增升,实现短距起飞。事实上,这是利用机身的转动来实现推力转向,对发动机的要求最低。起飞后,后机身放下来,和前机身平行,像普通飞机一样飞行
这个就比较疯狂了
Vertol 76(也称 VZ-2)是倾转机翼的早期尝试之一 / 由于整个机翼可以倾转,VZ-2 的平飞和普通固定翼飞机无异
但在机翼竖起来时,发动机推力向下,产生直接升力,而且机翼对发动机的下洗气流的遮挡很小 / 早期直升机界很活跃的 Hiller 也推出了 X-18 研究机,图中为地面演示机翼的倾转
除了倾转机翼的机构外,倾转机翼的机械结构相对简单,发动机刚性固定在机翼上,发动机气流和机翼的设计也相对简单
不知道是不是处于习惯的原因,直升机出身的公司大多走倾转旋翼的路子,固定翼出身的公司大多走倾转机翼的路子。50 年代初,美国军方资助了很多垂直起落的研究项目,但基本上都是概念研究,离实战使用相差很远。59 年军方根据一个咨询委员会的建议,启动一项旨在实用化的垂直起落飞机计划,特别要检验新飞机在实战条件下的,而且要适合三军(海军陆战队在 50 年代没有独立的采购计划,由海军代办)的需要,所以产生了三军联合的 XC-142 计划,LTV 的 Vought 分 部得标,Hiller 和 Ryan 作为主要次级承包商,计划由空军主持。XC-142 可以装载 32 名士兵,比 30 年后的 V-22 还多 40%,四台发动机和 5 个螺旋桨(4 个推进螺旋桨加一个机尾的姿态控制螺旋桨)全部交联,所以只有还有一台发动机在工作,5 个螺旋桨都会转动,尽管可能动力不足。空军对 XC-142 作了大量的测试,包括空运、空投、沙漠、山地、航母、搜索救援、装载机动车辆等。XC-142 最后还是坏在机械复杂性上,可靠性不够,而且机翼在 35-80 度倾转范围里,机翼像门板一样,受横风影响太大,发动机差动推力的控制不够灵敏。最大的抱怨是机翼倾转过程中,差动的辅翼有横滚控制变为偏航控制,而差动的发动机推力由偏航控制变为横滚控制,这不光是一个操作习惯的改变,还在机翼倾转的过程中,横滚控制和偏航控制交联,要求飞行员作大量复杂的补偿动作,工作量太大,而且机舱内噪音和振动太大,估计和在接近垂直状态而低速前进时,刚性的螺旋桨对非对称升力不作补偿,振动全传到机舱里了。XC-142 在 67 年下马了。
早期倾转机翼发展得最远的还要数 Vought Hiller Ryan 三家合作的 XC-142,美国军方对 XC-142 也寄予深望,空军、陆军和海军联合研制,这是又一个 Tri-Service 项目 / XC-142 起飞到平飞的过程
倾转机翼在垂直起飞和悬停时,竖起的巨大机翼形成“门板”效应,容易受低空阵风影响 / 作短距起飞时,机翼并不倾转到垂直,有趣的是,平尾也同步倾转,充分利用发动机下洗气流在地面造成的反弹,增强地面效应
XC-142 在航母 Bennington 号上着舰试验 / 如果有合适的跑道,当然也可以正常滑跑起飞
加拿大Bombardier CL-84 在试飞中
60 年代德国航空工业专注于垂直/短距起落飞机,MBB 的 Bo-140 是其中一个夭折的方案,其倾转机翼可以清楚地看见,MBB 的全称为 Messerschmitt Bolkow Blohm,包括前 Messerschmitt 和 Bolkow 的人马,Ludwig Bolkow 是第一架实战的喷气式战斗机
Me 262
的总设计师
Bo-140 还打算作为战术运输机,取代 C-160“协同” / 同时期的还有 VFW VC-400,VFW 的全称为 Vereinigte Flugtechnische Werke,包括前 Heinkel 和 Focke-Wulf 的人马
倾转机翼的机械相当复杂,可靠性成问题。早期的 X-18 和 XC-142 用螺杆千斤顶控制机翼的倾转,动作平稳但是迟缓。经过 30 年的冬眠,倾转机翼近来有复苏的迹象。美国空军在寻找 C-130 的替代的过程中,从 AMST 开始,已经放弃了垂直起落的要求,现在只要求短 距起落。波音将倾转机翼的概念用于“先进战区运输机”(Advanced Theater Transport)计划的招标,利用倾转机翼和地面效应相结合产生的增升效果,来达到短距起落。
倾转机翼经过 30 年的冬眠,现在又重新得到重视,这是波音的 147 型倾转机翼公务飞机 / 波音的雄心当然不止于小型公务飞机,波音投标美军“先进战区运输机”(Advanced Theater Transport,简称ATT)的方案就是倾转机翼。ATT只要求短距起落,而不强调垂直起落,不过波音的 ATT 形状怪异,被戏称为“超级大青蛙”(Super Frog)
要是没有心理准备,冷不防看见空中飞来这么一个怪东西,地面的敌人怕是惊得目瞪口呆,放枪也忘记了 / 洛克希德的 ATT 方案就要常规多了,虽然为隐身修形的机翼和 V 形尾比较新颖
洛克希德的另一个 ATT 方案就简直是 F-22 的运输机版了
意大利 Agusta 推出的 ERICA 计划不仅仅是又一个倾转旋翼的方案 ,ERICA 的机翼外翼段倾转,使其介于倾转旋翼和倾转机翼之间,不过现在 ERICA 已经和 Eurotilt 合并了
至此,倾转动力基本上都是在机翼和发动机上动脑筋,Freewing(不知道中文该怎么翻译?)把思路颠一个倒,把机身、机翼固定,但把安装发动机的前机身倾转,或许这应该成为倾转机身?倾转机身,安装在机身上的发动机的推力产生向下的升力分量,产生直接升力。但这只是一部分,推力气流从地面的反射要是利用好的话,可以大大强化升力,Freewing 就是靠直接升力和地面效应极大地增加起飞过程中的升力的。升空后,前后机身拉直,像普通飞机一样飞行。不过 Freewing 很难做到垂直起落,只能短距起落。这在使用中不是那么了不起的一个限制,如果需要滑跑的距离足够短,比如只要十几米,在大部分情况下,还是能够找到合适的场地的。Freewing 也是公司的名字,Freewing 目前只用在无人机上,但 Freewing 的野心不止于无人机,提出的 Freewing 喷气战斗机方案很有点惊世骇俗,把通常 Freewing 的前后机身倒一个个儿,在短促的滑跑后,用气动力把机尾压下去,把机首抬起来,后面的事情就和一般的 Freewing 一样了。
Freewing 是推力转向的一个新思路,机身、机翼固定,但安装发动机的前机身可以抬起来,提供额外的升力分量,缩短起飞距离。不过 Freewing 不可能实现垂直起落
到目前为止,Freewing 只用于无人机,由于前机身在起落时要高高扬起,载人的机舱布置在前机身恐怕有问题,而飞行员坐在后机身又有违传统,看来 Freewing 概念要用到载人飞机还有一段日子
不过人们的想象力是无穷的,如果倒一个个儿,前机身和地面水平,后机身翘起来,水平滑跑一小段距离后,水平尾翼用气动力量把尾巴压下去…… / 这样较重的前机身就抬了起来,可以利用向下的喷气推力分量,增加升力,尾撑之间的水平尾翼还可以“捕获”喷气发动机的下洗气流从地面的反弹,利用地效增升,实现短距起飞。事实上,这是利用机身的转动来实现推力转向,对发动机的要求最低。起飞后,后机身放下来,和前机身平行,像普通飞机一样飞行
这个就比较疯狂了
旋翼也好,螺旋桨也好,产生推力的原理都是一样的。如果把螺旋桨用涵道包覆起来,变成涵道螺旋桨(ducted fan),初看和普通螺旋桨没有太大两样,但是涵道内外的气流有速度差,在贝努力原理的作用下,涵道内的高度气流可以拖动涵道外的低速气流,可以产生比涵道内气流流动多至 50% 的额外推力。涵道本身在平飞状态也产生升力,这时圆形的涵道实际上就构成了环形机翼。平直翼、后掠翼、三角翼甚至前掠翼是人们所熟悉的,但环形翼也是产生升力的一个有效方法。环形翼可以想象成翼梢小翼的一个极端,由于制造和分析上不如平面翼简单,一直没有得到重视,在涵道风扇上的应用可算是歪打正着。涵道风扇也可以倾转,除了涵道本身也产生升力外,倾转涵道风扇(tilt ducted fan)具有和倾转螺旋桨一样的优缺点,不过在涵道风扇在倾转过程中,唇部的迎角不断变化,倾转到一定程度时会引起失速,改变飞机的升力分布,带来一定的飞行控制上的困难,同时造成风扇进气的紊乱,和很大的嗡嗡声。Doak VZ-4 是倾转涵道风扇的先驱,但最重要的倾转涵道风扇飞机应该是贝尔 X-22。尽管美国海军这是三军联合的项目的一员,但海军更中意短小的倾转涵道风扇方案,以便由航母升降机容纳,也免除折叠机翼的必要。涵道风扇也对甲板人员比较安全。于是海军在参加 XC-142 的同时,推动贝尔 X-22 计划。贝尔 X-22 采用四台涡轴发动机,两两布置在垂尾两侧,通过交联的同步轴,驱动所有四副涵道风扇,每个涵道出口的一个气动控制面提供垂直起落和平飞中的飞行控制。巨大的垂尾实际上没有舵面,只是起方向稳定作用。X-22 的涵道风扇的有 35% 的剩余功率,只要三个涵道风扇就能够实现垂直起落,只剩两个了还能正常平飞,在跑道降落只需要一个涵道风扇就够了。海军对 X-22 的试飞成果相当满意,责成负责研制 X-22 飞行控制的 Cornell Aeronautical Laboratory(后称 Calspan 公司)继续完善自动飞行增稳控制系统。到 80 年 Calspan 完成项目,军方已经对垂直起落飞机失去耐心,X-22 计划无疾而终。


Doak VZ-4 是采用倾转涵道风扇的先驱 / 水平的涵道本身可以产生升力,但倾转过程中,涵道唇部会出现失速

Doak VZ-4 从起飞到平飞的转换过程
贝尔 X-22 又是一个三军联合的项目 / 由于采用涵道风扇,没有不对称升力和后行桨叶失速的问题,可以放心采用刚性桨叶

四
个大水桶一样的涵道风扇在空中翻转,也是一景 / 法国的 Nord(后并入 Aerospatiale)也研制了 Nord 500 Cadet,发动机推力和涵道出口的菱形导流片提供悬停状态下的姿态控制
如果不倾转涵道风扇,而是把涵道风扇固定在机翼或机身内重心附近,用于在垂直起落时提供升力,在平飞的时候覆盖起来,减少阻力,这就是升力风扇的方案了。升力风扇方案并不新颖,二战后期纳粹德国热衷于一剑定乾坤的秘密武器,垂直起落战斗机是其中的一部分,升力风扇就是以研制号称二战中德国最优秀战斗机 FW 190 战斗机著名的 Focke-Wulf 的方案。但首先实现这个概念的,还是 Vanguard Omniplane。Vanguard 是由 Piasecki 分出来的一些人建立的,Omniplane 时运不佳,完成系留试验后,机械可靠性的问题就早早终止了 Omniplane 的生涯。不久,制造航空发动机出生的通用电气希望涉足垂直起落领域,和 Ryan 合作,研制了 XV-5 研究机。XV-5 比 Omniplane 要接近实用化多了,升力风扇依然埋在机翼里,但在平飞的时候,可以由盖板盖起来,减小阻力。上盖板是背对背打开的两个半圆形,下盖板是百叶窗形,打开时用作悬停状态下的偏航控制。机首有一个由百叶窗遮盖的小型升力风扇,用于俯仰控制。XV-5 的升力风扇有 31% 的剩余功率。XV-5 暴露了升力风扇的一些问题:升力风扇占用体积过大,载油和机载设备很受限制。另外飞行控制响应不灵敏,悬停到平飞的转换只有很小的操作窗口,越界的话,容易失事。由于机翼内的风扇使机翼很厚,XV-5 遇到很大的阻力问题,尽管是喷气式飞机,实际平飞速度不比二战时的螺旋桨飞机快。XV-5 在 70 年代头上就下马了。不过升力风扇在 90 年代再现辉煌,入选的洛克希德 F-35 采用的就是升力风扇。F-35 的故事容后再述。

Focke-Wulf 的升力风扇方案
二战后期,德国秘密武器研制计划中,Focke-Wulf 就有用升力风扇实现垂直起落的想法,但真正实现这一概念的,还是 Vanguard Omniplane / 其机翼中巨大的胜利风扇提供垂直起落时的升力,机尾的推进涵道螺旋桨提供推力,涵道后的气动控制面提供飞行控制

机翼实际上还是符合气动升力的要求的,就是特别肥厚了一点
通用电气是制造航空发动机的公司,但在 50-60 年代的垂直起落大潮中,也来赶了一回时髦,和 Ryan 联手,研制了 XV-5 垂直起落研究机,机翼上的盖板可以打开,暴露出机翼内的升力风扇 / XV-5 在悬停中,可以看到机翼上向上折起的风扇盖板,机翼下表面另有百叶窗式的盖板
这张图可以看到一点机翼下表面百叶窗 / 这里可以清楚地看到打开盖板后机翼里的升力风扇,注意机首还有一个关闭的“百叶窗”,下面是另一个较小的升力风扇,用于控制俯仰
平飞时,机翼上下表面的风扇盖板板关闭,减小机翼阻力
XV-5 的风扇有点创意,是通过对翼尖吹气驱动的,即所谓 tip turbine
比升力风扇上更“优美”的是所谓引射增升(ejector)。引射是贝努力原理的一个应用,如果对文丘里管(背对背的喇叭口)吹入高速气流,在文丘里管的喉部会产生低压,这个低压会拉动文丘里管外上游的空气,和吹入气流混合,一起喷出文丘里管,最后文丘里管出口的气流流量大于吹入的气流。工业上常用这个原理,将大型容器内的气体抽吸出来。理论和实验证明,拉动气流和吹入气流之比可以达到 1.5-2:1,如果在机身或机翼上安装引射装置,就可以用较少的喷气发动机引出高压气流,产生较大的直接升力,这就是引射增升的基本道理。和直接采用旋翼/螺旋桨/风扇的方案相比,引射增升容易和机体气动外形实现保形,减小正常飞行时的气动阻力;引射装置的布置比较灵活;引射的排气和周围的冷空气混合,温度、速度大大降低,对跑道或甲板的烧蚀较小,发动机吸入废气的影响也小一些。70 年代时,由于越南战争的拖累,加上传统的大甲板航母的采购和运行实在太贵,在时任海军作战部长 Elmo Zumwalt 海军上将(最新的“21 世纪驱逐舰”DDG21 就是用他的名字命名的)的倡导下,美国开始研究“海上控制舰”(Sea Control Ship)概念,意图用较小的(一到两万吨)的直通甲板小型航母,运载较少但仍有足够战斗力的垂直/段距起落飞机,补充大甲板航母的作战,美国海军开始对垂直起落战斗机认真起来。美国海军和工业界研究了众多方案,
Part14
里的最后一幅变形金刚也是当时的一个方案,目的是结合当时在阿波罗飞船上获得成功的空中对接技术,用重型吊车把垂直起落飞机吊到舷侧,然后点燃发动机,炽热的喷气流直接射向海面,不损伤甲板,着陆时把顺序反过来。类似的还有在“鹞”式战斗机背上吊挂的方案,但最后选定的是采用引射增升的罗克韦尔 XFV-12 方案。 XFV-12 采用美国战斗机中不常见的鸭式布局,鸭翼低置,主翼为上单翼,翼尖设垂尾,总体布局比较前卫,但最前卫的当然是在机翼内和鸭翼内的引射增升装置。发动机为 F401,这是本打算用于
F-14B
的海军型的 F100 发动机,F-14A 的 TF-30 发动机发动机一直有动力不足和可靠性低下的问题,海军一直就是把 F-14A 作为过渡型战斗机,采用和 F-15 的 F100 发动机大量共享的 F401 发动机的 F-14B 才是海军心目中的理想战斗机,但 F100 和 F-15 的发动机进气道匹配问题及 F100 本身的可靠性问题,在 F-15 服役的前几年,差不多使任何时候至少有一半的 F-15“永久性”地趴窝,海军的 F-14A 也就变成“永久性”的,直到装 F110 的 F-14D 的出现,但那已经为时太晚,不过这扯远了。对于 XFV-12 来说,F401 的可靠性还没有成为问题,自身的基本设计已经问题多多。XFV-12 的前后左右的引射增升装置控制俯仰和横滚,引射增升装置下方下洗气流中的控制面控制偏航。考虑到实际气动损失和不完全混合,实验室规模的 XFV-12 引射系统可以达到 55% 的增升率,也就是说,1 份吹气可以拉动 0.55 份环境空气,但实际试飞时,主翼的引射装置只达到可怜的 19% 的增升率,鸭翼只达到几乎可以忽略不计的 6%,远远没有达到设计要求。在计划大大超时超支后,海军的战略也转为“向大甲板航母一边倒”,XFV-12 就此下马了。


洛克希德XV-4A“蜂鸟”是首先探索引射增升概念的研究机,XV-4A已经开始显现引射用于增升在理论效益和实际效果上的差异 / 平飞中的 XV-4A,引射装置关闭,以减小阻力

在 JSF 之前,罗克韦尔 XFV-12 是美国最接近实用的垂直/短距起落战斗机
罗克韦尔 XFV-12 本来是准备成为海军的主力垂直起落战斗机的 / 机翼和鸭翼上的百叶窗打开后,引射增生装置就可以工作了,前后左右的引射装置及下面的导流片控制俯仰、横滚和偏航


两架 XFV-12 样机在装配中 / 这是已经装配好的两架样机

鸭翼上打开的百叶窗和喷气导管清晰可见

机尾的“塞”式喷管,在垂直起落状态下,主喷管关闭,喷气流通过导管导向机翼和鸭翼内的引射增升装置


XFV-12 正在准备系留试验 / XFV-12 完成了系留状态下的悬停试验,但还没有进入到自由飞状态下的悬停试验,就下马了
Doak VZ-4 是采用倾转涵道风扇的先驱 / 水平的涵道本身可以产生升力,但倾转过程中,涵道唇部会出现失速
Doak VZ-4 从起飞到平飞的转换过程
贝尔 X-22 又是一个三军联合的项目 / 由于采用涵道风扇,没有不对称升力和后行桨叶失速的问题,可以放心采用刚性桨叶
四
个大水桶一样的涵道风扇在空中翻转,也是一景 / 法国的 Nord(后并入 Aerospatiale)也研制了 Nord 500 Cadet,发动机推力和涵道出口的菱形导流片提供悬停状态下的姿态控制
如果不倾转涵道风扇,而是把涵道风扇固定在机翼或机身内重心附近,用于在垂直起落时提供升力,在平飞的时候覆盖起来,减少阻力,这就是升力风扇的方案了。升力风扇方案并不新颖,二战后期纳粹德国热衷于一剑定乾坤的秘密武器,垂直起落战斗机是其中的一部分,升力风扇就是以研制号称二战中德国最优秀战斗机 FW 190 战斗机著名的 Focke-Wulf 的方案。但首先实现这个概念的,还是 Vanguard Omniplane。Vanguard 是由 Piasecki 分出来的一些人建立的,Omniplane 时运不佳,完成系留试验后,机械可靠性的问题就早早终止了 Omniplane 的生涯。不久,制造航空发动机出生的通用电气希望涉足垂直起落领域,和 Ryan 合作,研制了 XV-5 研究机。XV-5 比 Omniplane 要接近实用化多了,升力风扇依然埋在机翼里,但在平飞的时候,可以由盖板盖起来,减小阻力。上盖板是背对背打开的两个半圆形,下盖板是百叶窗形,打开时用作悬停状态下的偏航控制。机首有一个由百叶窗遮盖的小型升力风扇,用于俯仰控制。XV-5 的升力风扇有 31% 的剩余功率。XV-5 暴露了升力风扇的一些问题:升力风扇占用体积过大,载油和机载设备很受限制。另外飞行控制响应不灵敏,悬停到平飞的转换只有很小的操作窗口,越界的话,容易失事。由于机翼内的风扇使机翼很厚,XV-5 遇到很大的阻力问题,尽管是喷气式飞机,实际平飞速度不比二战时的螺旋桨飞机快。XV-5 在 70 年代头上就下马了。不过升力风扇在 90 年代再现辉煌,入选的洛克希德 F-35 采用的就是升力风扇。F-35 的故事容后再述。
Focke-Wulf 的升力风扇方案
二战后期,德国秘密武器研制计划中,Focke-Wulf 就有用升力风扇实现垂直起落的想法,但真正实现这一概念的,还是 Vanguard Omniplane / 其机翼中巨大的胜利风扇提供垂直起落时的升力,机尾的推进涵道螺旋桨提供推力,涵道后的气动控制面提供飞行控制
机翼实际上还是符合气动升力的要求的,就是特别肥厚了一点
通用电气是制造航空发动机的公司,但在 50-60 年代的垂直起落大潮中,也来赶了一回时髦,和 Ryan 联手,研制了 XV-5 垂直起落研究机,机翼上的盖板可以打开,暴露出机翼内的升力风扇 / XV-5 在悬停中,可以看到机翼上向上折起的风扇盖板,机翼下表面另有百叶窗式的盖板
这张图可以看到一点机翼下表面百叶窗 / 这里可以清楚地看到打开盖板后机翼里的升力风扇,注意机首还有一个关闭的“百叶窗”,下面是另一个较小的升力风扇,用于控制俯仰
平飞时,机翼上下表面的风扇盖板板关闭,减小机翼阻力
XV-5 的风扇有点创意,是通过对翼尖吹气驱动的,即所谓 tip turbine
比升力风扇上更“优美”的是所谓引射增升(ejector)。引射是贝努力原理的一个应用,如果对文丘里管(背对背的喇叭口)吹入高速气流,在文丘里管的喉部会产生低压,这个低压会拉动文丘里管外上游的空气,和吹入气流混合,一起喷出文丘里管,最后文丘里管出口的气流流量大于吹入的气流。工业上常用这个原理,将大型容器内的气体抽吸出来。理论和实验证明,拉动气流和吹入气流之比可以达到 1.5-2:1,如果在机身或机翼上安装引射装置,就可以用较少的喷气发动机引出高压气流,产生较大的直接升力,这就是引射增升的基本道理。和直接采用旋翼/螺旋桨/风扇的方案相比,引射增升容易和机体气动外形实现保形,减小正常飞行时的气动阻力;引射装置的布置比较灵活;引射的排气和周围的冷空气混合,温度、速度大大降低,对跑道或甲板的烧蚀较小,发动机吸入废气的影响也小一些。70 年代时,由于越南战争的拖累,加上传统的大甲板航母的采购和运行实在太贵,在时任海军作战部长 Elmo Zumwalt 海军上将(最新的“21 世纪驱逐舰”DDG21 就是用他的名字命名的)的倡导下,美国开始研究“海上控制舰”(Sea Control Ship)概念,意图用较小的(一到两万吨)的直通甲板小型航母,运载较少但仍有足够战斗力的垂直/段距起落飞机,补充大甲板航母的作战,美国海军开始对垂直起落战斗机认真起来。美国海军和工业界研究了众多方案,
Part14
里的最后一幅变形金刚也是当时的一个方案,目的是结合当时在阿波罗飞船上获得成功的空中对接技术,用重型吊车把垂直起落飞机吊到舷侧,然后点燃发动机,炽热的喷气流直接射向海面,不损伤甲板,着陆时把顺序反过来。类似的还有在“鹞”式战斗机背上吊挂的方案,但最后选定的是采用引射增升的罗克韦尔 XFV-12 方案。 XFV-12 采用美国战斗机中不常见的鸭式布局,鸭翼低置,主翼为上单翼,翼尖设垂尾,总体布局比较前卫,但最前卫的当然是在机翼内和鸭翼内的引射增升装置。发动机为 F401,这是本打算用于
F-14B
的海军型的 F100 发动机,F-14A 的 TF-30 发动机发动机一直有动力不足和可靠性低下的问题,海军一直就是把 F-14A 作为过渡型战斗机,采用和 F-15 的 F100 发动机大量共享的 F401 发动机的 F-14B 才是海军心目中的理想战斗机,但 F100 和 F-15 的发动机进气道匹配问题及 F100 本身的可靠性问题,在 F-15 服役的前几年,差不多使任何时候至少有一半的 F-15“永久性”地趴窝,海军的 F-14A 也就变成“永久性”的,直到装 F110 的 F-14D 的出现,但那已经为时太晚,不过这扯远了。对于 XFV-12 来说,F401 的可靠性还没有成为问题,自身的基本设计已经问题多多。XFV-12 的前后左右的引射增升装置控制俯仰和横滚,引射增升装置下方下洗气流中的控制面控制偏航。考虑到实际气动损失和不完全混合,实验室规模的 XFV-12 引射系统可以达到 55% 的增升率,也就是说,1 份吹气可以拉动 0.55 份环境空气,但实际试飞时,主翼的引射装置只达到可怜的 19% 的增升率,鸭翼只达到几乎可以忽略不计的 6%,远远没有达到设计要求。在计划大大超时超支后,海军的战略也转为“向大甲板航母一边倒”,XFV-12 就此下马了。
洛克希德XV-4A“蜂鸟”是首先探索引射增升概念的研究机,XV-4A已经开始显现引射用于增升在理论效益和实际效果上的差异 / 平飞中的 XV-4A,引射装置关闭,以减小阻力
在 JSF 之前,罗克韦尔 XFV-12 是美国最接近实用的垂直/短距起落战斗机
罗克韦尔 XFV-12 本来是准备成为海军的主力垂直起落战斗机的 / 机翼和鸭翼上的百叶窗打开后,引射增生装置就可以工作了,前后左右的引射装置及下面的导流片控制俯仰、横滚和偏航
两架 XFV-12 样机在装配中 / 这是已经装配好的两架样机
鸭翼上打开的百叶窗和喷气导管清晰可见
机尾的“塞”式喷管,在垂直起落状态下,主喷管关闭,喷气流通过导管导向机翼和鸭翼内的引射增升装置
XFV-12 正在准备系留试验 / XFV-12 完成了系留状态下的悬停试验,但还没有进入到自由飞状态下的悬停试验,就下马了
翼尖倾转的升力-巡航发动机有减少向下喷气对机身烧蚀的好处,喷气回吸的问题也相对比较好解决,但沉重的发动机像哑铃一样挂在翼尖,远离重心,横滚方向的转动惯量很大,对机动性非常不利。像上述倾转喷气一样,在垂直起落阶段,远离中轴的升力发动机一旦故障或瞬时出力不足,非常容易引起灾难性的事故,所以 VJ-101 和 XF-109 都在翼尖采用双份发动机,但进一步增加翼尖发动机组的重量和复杂性。如果把升力发动机全部集中到机身内,这个问题就可以得到解决。苏联的雅可夫列夫就是这么做的,直接结果就是:雅克-38 只有两台升力发动机和一台升力-巡航发动机。机体内的升力发动机也降低了单发失效对安全的威胁。但升力发动机安装在机体内,也是有其问题的。首先,炽热的喷气里发动机进气口很近,容易造成喷气回吸问题。第二,高速喷气在机体下延地面向两侧流动,而机体上方除升力发动机进气口附近外,空气相对静止,造成使机体向地面吸附的效果,即所谓 suck down。雅克-38 在使用中对飞行员的操控要求十分苛刻,一个不小心,就会出事故。雅克为此专门设计自动弹射救生系统,在垂直起落阶段,一旦机体倾斜超过一定程度,就自动弹射,速度和高度达到一定程度以上,自动解除。从某种意义上说,雅克-38 是为了和“基辅”级航空母舰配套而匆匆投入使用的。作为作战飞机,雅克-38 并不成功,只有 600 公斤的载弹量、100 公里的航程和有限的机载电子设备,在实战中,很难作为同时代的 F-14、F-18 的对手。雅克-38 的可靠性也十分糟糕,第一个中队的 6 架雅克-38 随“基辅”号出航时,出发伊始,就有一半不能飞,等到一个月后返航时,只剩一架还能升空了。为了尽可能增加航程和载弹量,苏联海军飞行员最后走上德国和英国同行的路,采用短滑跑起落。但早期的雅克-38 没有考虑滑跑起飞,前机轮不能控制转向。雅可夫列夫设计局根据使用经验,设计了改进型雅克-38M,不光前机轮可以转向,而且在机背升力发动机进气口两侧,增加了纵向的挡板,可以缓解一点喷气回吸的问题。苏联曾经想过将雅克-38 用于前线近距对地支援,并在阿富汗试验性地部署了几架雅克-38,但垂直起落时造成的巨大尘土大大增加发动机的磨损,也严重恶化了飞行员视界,危害飞行安全。很高的地勤支援要求也使前线部署不实际,这个想法很快就放弃了,雅克-38 再也没有作为陆地起落的战斗机部署过。苏联解体后,军费剧减,鸡肋的雅克-38 在 92 年就 退出现役,配套的“基辅”级航空母舰也很快推出现役,其中的“明斯克”号成了中国人的海上主题公园。

最早在海上遭遇雅克-38 时,西方很是为之一震:莫非这是航母化的苏联海军的前奏?


雅克-38 曾经是苏联海军航母化的希望,但只有 600 公斤的载弹量和 100 公里的作战航程,使雅克-38 的实际作战空域和图中相差不远 / 可以看到,前升力发动机的进气门和排气门已经打开,升力-巡航发动机的喷口也转向垂直
按照设计,雅克-38 只能垂直起落,但飞行员们创造性地使雅克-38 短滑跑起落,大大改善了航程和载弹

雅克-38 试验过在民船上垂直起落,由于对甲板烧蚀过于严重,只有在紧急情况下偶尔为之,没有作战价值,最后放弃了

雅克-38M 是雅克-38 的改进型,外表上最明显的改动,就是机背升力发动机进气口两侧的挡板,用于改善喷气回吸的问题。不太明显的改动是前机轮改为可转向,便于短滑跑起落时的控制 / 雅克-38 双座型,这可以竞选选丑冠军了

苏军曾试图将雅克-38 用于陆上的近距空中支援,但垂直起落造成的沙尘对发动机寿命和飞行员视野影像太大,其载弹、航程太低,对地勤的要求太高,远远不如武装直升机实用,很快放弃了
在雅克-38 的基础上,雅可夫列夫设计局进一步设计了超音速的雅克-41(也称雅克-141)。雅克-41 在设计上比雅克-38 要成熟很多,据说作为战斗机的基本性能不亚于米格-29,那比雅克-38 是一个非常大的进步。雅克-38 的发动机喷口是 Y 形的,在中机身向两侧分叉。这是为了保证升力-巡航发动机的喷口在机体重心附近。雅克-41 反其道而行之,采用单一的向量喷口,但尾翼安装在喷口两侧的尾撑上。雅克-41 进行了成功的试飞,但雅克-41 生不逢时,正好赶上苏联解体,军购急剧缩水。雅可夫列夫用自己的经费还勉强支撑了几年,希望能吸引外国合作伙伴,但没有结果。海湾战争和 ATF 竟标后,雅可夫列夫看到隐身对新一代作战飞机的影响,将雅克-41 按隐身要求修形成雅克-43,后来还进一步改进成雅克-201,最后还是无果而终。然而,洛克希德看中了雅克-41 的设计经验。尽管不能说 X-35 抄袭雅克-41,但 X-35 的设计受到雅克-41 的影响是没有问题的,尤其是其升力-巡航发动机的安排,这是和雅可夫列夫交流的结果,洛克希德也供认不讳。
雅克-41(也称雅克-141)是吸取雅克-38 的经验后研制的,本来有望成为第一架实战型超音速垂直起落战斗机,图中可以清楚地看到尾矢量喷管转到垂直起落状态,升力发动机的进气门、排气门也已经打开
雅克-41 在较高高度悬停,可以看到升力发动机正在工作。较长的尾撑和双垂尾是配平全机重心的需要
吸取雅克-38 的经验后,雅克-41 从一开始就是按可以常规滑跑起落设计的 / 雅克-41 的主要用户当然还是海军
在 91 年海湾战争后,雅可夫列夫意识到隐身将是新一代作战飞机的重要特征。在见识了 F-22 的新姿后,雅可夫列夫急忙推出雅克-43 的方案,明显地采用一些隐身修形,但雅克-41 的基本布局不变

雅克-43 将比 F-35 更大,但性能就不好说了,毕竟是萝卜、青菜,不好比
还有更时尚的雅克-201 方案,不过没有走下纸面
[ 此贴被EEE网情深在2006-11-25 23:12重新编辑 ]
最早在海上遭遇雅克-38 时,西方很是为之一震:莫非这是航母化的苏联海军的前奏?
雅克-38 曾经是苏联海军航母化的希望,但只有 600 公斤的载弹量和 100 公里的作战航程,使雅克-38 的实际作战空域和图中相差不远 / 可以看到,前升力发动机的进气门和排气门已经打开,升力-巡航发动机的喷口也转向垂直
按照设计,雅克-38 只能垂直起落,但飞行员们创造性地使雅克-38 短滑跑起落,大大改善了航程和载弹
雅克-38 试验过在民船上垂直起落,由于对甲板烧蚀过于严重,只有在紧急情况下偶尔为之,没有作战价值,最后放弃了
雅克-38M 是雅克-38 的改进型,外表上最明显的改动,就是机背升力发动机进气口两侧的挡板,用于改善喷气回吸的问题。不太明显的改动是前机轮改为可转向,便于短滑跑起落时的控制 / 雅克-38 双座型,这可以竞选选丑冠军了
苏军曾试图将雅克-38 用于陆上的近距空中支援,但垂直起落造成的沙尘对发动机寿命和飞行员视野影像太大,其载弹、航程太低,对地勤的要求太高,远远不如武装直升机实用,很快放弃了
在雅克-38 的基础上,雅可夫列夫设计局进一步设计了超音速的雅克-41(也称雅克-141)。雅克-41 在设计上比雅克-38 要成熟很多,据说作为战斗机的基本性能不亚于米格-29,那比雅克-38 是一个非常大的进步。雅克-38 的发动机喷口是 Y 形的,在中机身向两侧分叉。这是为了保证升力-巡航发动机的喷口在机体重心附近。雅克-41 反其道而行之,采用单一的向量喷口,但尾翼安装在喷口两侧的尾撑上。雅克-41 进行了成功的试飞,但雅克-41 生不逢时,正好赶上苏联解体,军购急剧缩水。雅可夫列夫用自己的经费还勉强支撑了几年,希望能吸引外国合作伙伴,但没有结果。海湾战争和 ATF 竟标后,雅可夫列夫看到隐身对新一代作战飞机的影响,将雅克-41 按隐身要求修形成雅克-43,后来还进一步改进成雅克-201,最后还是无果而终。然而,洛克希德看中了雅克-41 的设计经验。尽管不能说 X-35 抄袭雅克-41,但 X-35 的设计受到雅克-41 的影响是没有问题的,尤其是其升力-巡航发动机的安排,这是和雅可夫列夫交流的结果,洛克希德也供认不讳。
雅克-41(也称雅克-141)是吸取雅克-38 的经验后研制的,本来有望成为第一架实战型超音速垂直起落战斗机,图中可以清楚地看到尾矢量喷管转到垂直起落状态,升力发动机的进气门、排气门也已经打开
雅克-41 在较高高度悬停,可以看到升力发动机正在工作。较长的尾撑和双垂尾是配平全机重心的需要
吸取雅克-38 的经验后,雅克-41 从一开始就是按可以常规滑跑起落设计的 / 雅克-41 的主要用户当然还是海军
在 91 年海湾战争后,雅可夫列夫意识到隐身将是新一代作战飞机的重要特征。在见识了 F-22 的新姿后,雅可夫列夫急忙推出雅克-43 的方案,明显地采用一些隐身修形,但雅克-41 的基本布局不变
雅克-43 将比 F-35 更大,但性能就不好说了,毕竟是萝卜、青菜,不好比
还有更时尚的雅克-201 方案,不过没有走下纸面
[ 此贴被EEE网情深在2006-11-25 23:12重新编辑 ]
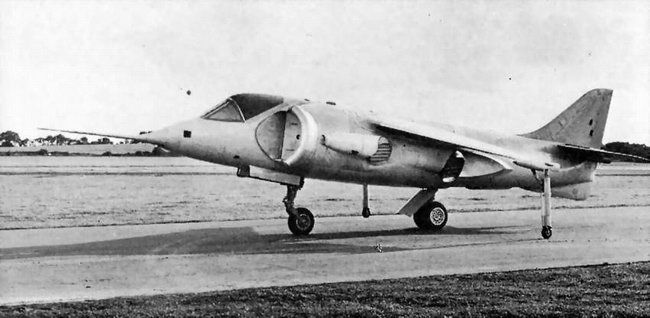
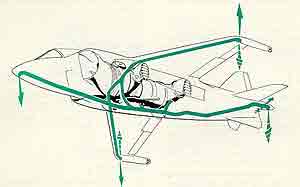
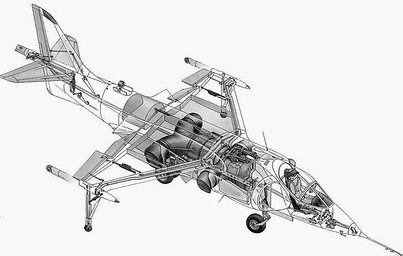
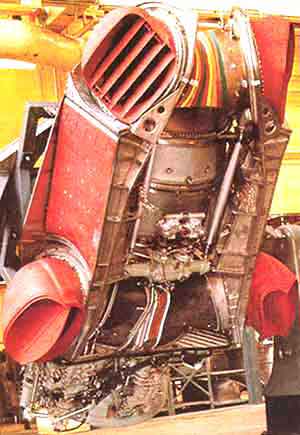
喷气式垂直起落飞机的终极当然是只用升力-巡航发动机,没有专用的升力发动机或巡航发动机,最大限度地减少死重。法国人 Michel Wibault 在 50 年代构想了这样一台发动机,将发动机主轴延长,驱动四台可以倾转的离心式压缩机,产生垂直升力,主发动机喷口也用百叶窗导流板,将剩余推力用于垂直起落。用四台压缩机是为了同时提供前后左右的姿态控制力矩,即所谓“四立柱原理”(4 poster),用离心式压缩机是因为当时技术条件下,离心式压缩机体积最小,产生的压力最高。事实上,早期喷气发动机很多都是用离心式压缩机的。Wibault 找上法国航空界,但法国空军的兴趣集中在看起来技术上风险较小 tail sitter,后来导致 SNECMA Coleoptere 系列,对 Wibault 的“体制外”的方案没有兴趣,Wibault 只好去找北约的美国资助的“共同武器开发计划”(Mutual Weapons Development Program,简称 MWDP),MWDP 的 Johnny Driscoll 很快把 Wibault 的设想转交给英国的 Bristol 航空发动机公司,当时 Bristol 正在设计用于 G.91 轻型攻击机的M WDP 资助的 Orpheus 发动机,所以两家互相都很熟悉。Bristol 的 Gordon Lewis 很快把 Wibault 的离心压缩机更换成效率更高的轴流压缩机,并把核心发动机更换成最新的 Orpheus,新的发动机成为 BE.52,并申请了专利。 Bristol 把 BE.52 的方案呈交给 MWDP,MWDP 出资 75%,Bristol 出资 25%,两者联合起来,向 Short 飞机公司兜售。Short 正在打 MWDP 的主意,一口答应,但资金到手后,还是回到前面提到过的 SC.1 研究机,把 BE.52(此时改名为 BE.53)为基础的垂直起落研究机丢到脑后去了。
Michel Wibault 的方案,用轴驱动的离心压缩机产生垂直升力
布雷盖 1010 方案准备采用类似 Wibault 的设计,但法国空军的兴趣集中在 SNECMA 的 Coleoptere 系列 tail sitter 上,布雷盖 1010 和其它类似的法国方案都无疾而终
但是上帝关闭了一扇门,一定打开了一扇窗。英国的另一家飞机公司 Hawker 这个时候正在琢磨 Hawker“猎人”(Hunter)式战斗机的后继问题。Hawker 的“猎人”是英国 50 年代很成功的一种喷气式战斗机,在英国皇家空军和很多国外空军(如瑞士、印度)中服役,但 50 年代航空技术发展飞快,Hawker 十分明白,必须立刻着手后继机的研制,否则就会落伍。Hawker 推出了 P.1103 方案,竞争英国皇家空军的新型两倍音速、挂载导弹的高性能战斗机,但是落选。Hawker 不灰心,自费将 P.1103 改进成 P.1121,希望获得英国和国外的“猎人”式战斗机的升级市场。但 57 年英国政府宣布,国防研发重点转向导弹,有人驾驶飞机项目大量下马。Hawker 一面继续寄希望于 P.1121,一面开始寻求退路,希望在垂直/短距起落飞机上杀出重围,Hawker 就是在这样的背景下,开始和 Bristol 就 BE.53 合作的。


Hawker“猎人”式战斗机,50 年代英国和英联邦国家的主力战斗机 / Hawker 本来是在用 P.1103 方案竞争英国皇家空军的新型战斗机,无奈落选

Hawker 不灰心,在 P.1103 方案上,自费改进成 P.1121,希望用来取代“猎人”式战斗机 / P.1121 也在英国国防采购政策倾向导弹后下马,Hawker 只好另辟蹊径,在垂直起落战斗机上出奇兵
Hawker 开始时还是三心二意的,对 BE.53 也不是太认真,主管的 Ralph Hooper 马马虎虎画了一个草图,但这是 BE.53 还是只有前面的四个转向喷管可以产生垂直升力。尾喷管只向后喷,这严重影响了发动机和全机的重心布置,最后设计成一个在地面需要高高扬起的怪设计,只有这样,才有可能借助尾喷管的推力实现垂直起飞。Hooper 把先前的颌下进气道改成两侧进气道,再在翼尖和首尾增加了姿态控制喷嘴,这个时候灵机一动,把原本单一的尾喷管改成分叉的尾喷管,前后喷管都可以转动,这样所有四个喷管都可以用于产生垂直升力和水平推力,这就成了现在“飞马”发动机的基本布局。Bristol 进一步将发动机风扇和压气机改成同轴反转,以抵消发动机轴向一个方向旋转在悬停时产生的陀螺章动,前喷管的喷气从压气机引出,而不再需要专门的轴流压缩机 和相应的进气道,“飞马”发动机成形了。但是,三心二意的 Hawker 这时候被英国皇家空军的攻击机竞争项目所吸引,但是又一次落选(入选的 TSR.2 也没有好下场,试飞成功后下马了)。军方对 P.1121 依然无动于衷,Hawker 只好又回到 P.1127 上来。这个时候,英国皇家空军才姗姗来迟地提供风洞,但对于 Hawker 来说,这是军方有兴趣的第一个表示,而之前一直只是北约(其实就是美国)在资助。不过这又带来了新的问题:皇家空军和北约的要求不同,最后北约的要求演变到德国的 VAK-191。59 年时,P.1127 正式上马, BE.53 发动机也改名为“飞马”。
这期间,Ralph Hooper 带着 Hawker 的试飞员到 NASA,和美国同行研究垂直起落飞机从垂直起落向水平飞行过渡时的飞行稳定性问题,并在 Bell X-14 上作了实地试验。NASA 也主动帮助试验自由飞模型,试验结果对 Hooper 非常鼓舞。
60 年 10 月 21 日,P.1127 终于首次在系留状态下升空。第一架 P.1127 的垂直升力勉强能把飞机升入空中,连无线电通信装置都要拆除,以节约重量。试飞员 Bill Bedford 的右腿刚在车祸中骨折,还上着石膏,但他还是带伤上阵。姿态控制和系留索打架,飞机在离地不高的空中像喝醉的母牛一样东倒西歪。61 年 9 月 12 日,Bill Bedford 完成了第一次垂直起落到水平飞行的转换,10 月 28 日完成了短距起飞,从一开始,人们就认识到短距起飞对增加载重-航程的作用。

最初的 P.1127 方案,尾喷管只向后喷,这严重影响了发动机和全机的重心布置

入选的 TSR.2 最后也没有逃过下马的命运
P.1127 的原型“雀鹰”(Kestrel),已经初具“鹞”式战斗机的形象
“飞马”发动机示意图 / “飞马”发动机向量喷口的液压作动机构示意图
罗尔斯.罗伊斯“飞马”发动机,注意其四叉的喷口
“飞马”发动机首次装入 Kestrel 研究机

“飞马”发动机的安装位置 / Kestrel 的姿态控制系统,注意首尾和翼尖姿态控制喷嘴和高压空气导管


为了避开发动机喷流对起落架的影响,Kestrel 的起落架被布置成现代战斗机上很少见的自行车式,除前后主起落架外,还在翼尖设置了辅助的起落架 / Kestrel 的向下的炽热喷流很容易烧蚀地面,地勤人员正在喷水冷却

Kestrel 的四叉喷口在这张图里很容易看见
[ 此贴被EEE网情深在2006-11-25 23:15重新编辑 ]
Michel Wibault 的方案,用轴驱动的离心压缩机产生垂直升力
布雷盖 1010 方案准备采用类似 Wibault 的设计,但法国空军的兴趣集中在 SNECMA 的 Coleoptere 系列 tail sitter 上,布雷盖 1010 和其它类似的法国方案都无疾而终
但是上帝关闭了一扇门,一定打开了一扇窗。英国的另一家飞机公司 Hawker 这个时候正在琢磨 Hawker“猎人”(Hunter)式战斗机的后继问题。Hawker 的“猎人”是英国 50 年代很成功的一种喷气式战斗机,在英国皇家空军和很多国外空军(如瑞士、印度)中服役,但 50 年代航空技术发展飞快,Hawker 十分明白,必须立刻着手后继机的研制,否则就会落伍。Hawker 推出了 P.1103 方案,竞争英国皇家空军的新型两倍音速、挂载导弹的高性能战斗机,但是落选。Hawker 不灰心,自费将 P.1103 改进成 P.1121,希望获得英国和国外的“猎人”式战斗机的升级市场。但 57 年英国政府宣布,国防研发重点转向导弹,有人驾驶飞机项目大量下马。Hawker 一面继续寄希望于 P.1121,一面开始寻求退路,希望在垂直/短距起落飞机上杀出重围,Hawker 就是在这样的背景下,开始和 Bristol 就 BE.53 合作的。
Hawker“猎人”式战斗机,50 年代英国和英联邦国家的主力战斗机 / Hawker 本来是在用 P.1103 方案竞争英国皇家空军的新型战斗机,无奈落选
Hawker 不灰心,在 P.1103 方案上,自费改进成 P.1121,希望用来取代“猎人”式战斗机 / P.1121 也在英国国防采购政策倾向导弹后下马,Hawker 只好另辟蹊径,在垂直起落战斗机上出奇兵
Hawker 开始时还是三心二意的,对 BE.53 也不是太认真,主管的 Ralph Hooper 马马虎虎画了一个草图,但这是 BE.53 还是只有前面的四个转向喷管可以产生垂直升力。尾喷管只向后喷,这严重影响了发动机和全机的重心布置,最后设计成一个在地面需要高高扬起的怪设计,只有这样,才有可能借助尾喷管的推力实现垂直起飞。Hooper 把先前的颌下进气道改成两侧进气道,再在翼尖和首尾增加了姿态控制喷嘴,这个时候灵机一动,把原本单一的尾喷管改成分叉的尾喷管,前后喷管都可以转动,这样所有四个喷管都可以用于产生垂直升力和水平推力,这就成了现在“飞马”发动机的基本布局。Bristol 进一步将发动机风扇和压气机改成同轴反转,以抵消发动机轴向一个方向旋转在悬停时产生的陀螺章动,前喷管的喷气从压气机引出,而不再需要专门的轴流压缩机 和相应的进气道,“飞马”发动机成形了。但是,三心二意的 Hawker 这时候被英国皇家空军的攻击机竞争项目所吸引,但是又一次落选(入选的 TSR.2 也没有好下场,试飞成功后下马了)。军方对 P.1121 依然无动于衷,Hawker 只好又回到 P.1127 上来。这个时候,英国皇家空军才姗姗来迟地提供风洞,但对于 Hawker 来说,这是军方有兴趣的第一个表示,而之前一直只是北约(其实就是美国)在资助。不过这又带来了新的问题:皇家空军和北约的要求不同,最后北约的要求演变到德国的 VAK-191。59 年时,P.1127 正式上马, BE.53 发动机也改名为“飞马”。
这期间,Ralph Hooper 带着 Hawker 的试飞员到 NASA,和美国同行研究垂直起落飞机从垂直起落向水平飞行过渡时的飞行稳定性问题,并在 Bell X-14 上作了实地试验。NASA 也主动帮助试验自由飞模型,试验结果对 Hooper 非常鼓舞。
60 年 10 月 21 日,P.1127 终于首次在系留状态下升空。第一架 P.1127 的垂直升力勉强能把飞机升入空中,连无线电通信装置都要拆除,以节约重量。试飞员 Bill Bedford 的右腿刚在车祸中骨折,还上着石膏,但他还是带伤上阵。姿态控制和系留索打架,飞机在离地不高的空中像喝醉的母牛一样东倒西歪。61 年 9 月 12 日,Bill Bedford 完成了第一次垂直起落到水平飞行的转换,10 月 28 日完成了短距起飞,从一开始,人们就认识到短距起飞对增加载重-航程的作用。
最初的 P.1127 方案,尾喷管只向后喷,这严重影响了发动机和全机的重心布置
入选的 TSR.2 最后也没有逃过下马的命运
P.1127 的原型“雀鹰”(Kestrel),已经初具“鹞”式战斗机的形象
“飞马”发动机示意图 / “飞马”发动机向量喷口的液压作动机构示意图
罗尔斯.罗伊斯“飞马”发动机,注意其四叉的喷口
“飞马”发动机首次装入 Kestrel 研究机
“飞马”发动机的安装位置 / Kestrel 的姿态控制系统,注意首尾和翼尖姿态控制喷嘴和高压空气导管
为了避开发动机喷流对起落架的影响,Kestrel 的起落架被布置成现代战斗机上很少见的自行车式,除前后主起落架外,还在翼尖设置了辅助的起落架 / Kestrel 的向下的炽热喷流很容易烧蚀地面,地勤人员正在喷水冷却
Kestrel 的四叉喷口在这张图里很容易看见
[ 此贴被EEE网情深在2006-11-25 23:15重新编辑 ]
随着各种技术问题不断出现,又得到解决,P.1127 最终被命名为“雀鹰”(Kestrel),Hawker 把“雀鹰”正式呈报给军方。但空军又改主意了,把“雀鹰”的速度从高亚音速改为 1.2 倍超音速,但这超出了“雀鹰”的能力,加大发动机推力也不行,需要大动干戈修改。与此同时,西德在竟标垂直起落攻击机(最后 VAK-191 入选),英国试图把西德拉入“雀鹰”计划,而美国陆军又对“雀鹰”有了兴趣,并把诺斯罗普拉进按许可生产“雀鹰”的意向书,所以英美德三方商议成立联合评估中队,共同评估垂直起落战斗机的飞行性能、训练和地勤支援要求、对空战和对地攻击的战术使用。不过这从一开始就是充满了黑幕,西德根本没有把 P.1127 太当一回事,还是一门心思在自己的 VAK-191 上。美国空军对陆军介入固定翼飞机感到不满,因此反对陆军加入三国联合评估中队。英国皇家空军也对 P.1127 性能不能达到超音速不满,正想找借口溜号。这场各怀鬼胎的扯皮谈了一年,最后三国中队在 65 年 4 月 1 日(愚人节,不是一个好日子呀)成立,包括了皇家空军、德国空军、美国空军、陆军、海军,演练了垂直、短距起落技巧,在野外简易机场的隐蔽和起落,以及模拟对地攻击。

Kestrel 由英国、美国和德国飞行员共同评估,机尾上就是“三国评估中队”的标志 / 按照设计,Kestrel 要能够在林间空地起落,以实现核大战条件下的分散部署和隐蔽出击。实际使用经验表明,分散部署对地勤支援的要求太高,在战时根本不实际。以后北约战略转向强调高性能战斗机,集中部署,集中保护,强调打击敌人,而不是分散生存
P.1154“鹞”式超音速战斗机下马后,Kestrel 得到进一步发展,作为过渡,“鹞”的名字被转用到这个改进型 Kestrel 上 / “鹞”式的卖点当然还是垂直起落

“鹞”式垂直起飞 / 手动转动向量喷口的示意
“鹞”式垂直起飞时的计算流体力学示意图
进气口旁的辅助进气口,用于垂直起落时增加进气量

在实用中,飞行员发现,如果在垂直起落中有一点前进速度,可以大大降低喷气回吸的影响,图中地面尘土和飞机的相对位置,表明这个飞行员正在向前低速移动 / “鹞”式战斗机上的“飞马”发动机在这张剖视图中清晰可见,其四叉喷口是实现向量推力的关键,但成也萧何,败也萧何,正是这四叉喷口,极大地限制了发动机和飞机的整体布置,而注定了“鹞”式只可能用“飞马”发动机,而不大可能有任何别的替代发动机

罗尔斯·罗伊斯和 BAe 正在试验 PCB(Plenum Combustion Chamber,增压燃烧室)
但是皇家空军对超音速要求还是念念不忘,坚持要求 Hawker 把 P.1127 改进成超音速,否则不会订货,北约也有相应的要求。这倒不是皇家空军和北约出花头,而是大势所趋。60 年代是一个追求高空高速的时代,战术飞机不能达到超音速被看作是一个严重的缺陷。Hawker 将“雀鹰”加长,发动机的前转向喷管采用喷管加力燃烧(Plenum Chamber Burning,简称 PCB)技术,和主发动机的加力推力一起,使飞机达到超音速,P.1127 也因此改名为 P.1154,并正式取名为“鹞”式。在 62 年北约竟标中,P.1154 赢得了技术分,但法国的幻影 III V 赢得了政治分,因为幻影对工作量在北约内均匀分布有利,否则好事全叫英国摊上了。不过最后结果实在也是无关紧要,因为北约并不对赢者拨款,还是要靠成员国自己出资进一步研发。
在英国,军方希望用 P.1154 取代空军的“猎人”和海军的“海狐”(Sea Vixen),但是空军需要的是单座攻击机,海军需要的是双座截击机,很快空军和海军就为了不同的技术、战术要求而争得不可开交。尽管 Hawker 对于在技术上是否可能同时满足空海军的要求根本没有信心,但先把鸭子煮熟,调味以后再说。但钓鱼工程不能瞒过所有人,最后的妥协方案空海军同时拒绝了。63 年底,军方决定海军的舰载战斗机由装备罗尔斯·罗伊斯“斯贝”涡扇发动机的 F-4“鬼怪”式战斗机完成,海军退出“鹞”式计划。“斯贝”日后被中国引进,用于“飞豹”战斗轰炸机,不过这是后话了。Hawker 终于可以轻装上阵了,但这是风水又转了,工党政府对英国航空工业的大砍刀下来,P.1154(和前述 TSR.2)一同下马。不过 Hawker 这一头没有一棍子打死,空军的“猎人”也有“鬼怪”式代替,但是由“雀鹰”配合,作为对地攻击使用,“鹞”的名字也被用于放大的“雀鹰”。“鹞”式在外形上和“雀鹰”十分相似,但要增大一圈,也增加了很多实用的战术装备。但是政府对“鹞”依然三心二意,财政部一算,外购“鬼怪”式和正在和法国合作研制的“美洲豹”(Jaguar)比自研“鹞”是节约一亿三千万英镑。在财政部提议取消“鹞”式的时候,科技部强烈反对再砍硕果仅存的“鹞”式,“鬼怪”式的采购计划由于“斯贝”发动机和“鬼怪”式的进气道适配问题而大大拖延、超支,“鹞”式是这样才躲过了下马的大砍刀。政府对“鹞”式毫无感情,军方对“鹞”式更是充满了敌意,三年前取消“雀鹰”的采购计划时的理由一个也没有改变,皇家空军是把“鹞”式当作过渡性的应急之作。Hawker 就是这样步履维艰地开始了历史上唯一参加过实战的喷气式垂直起落战斗机的研制。经过多年的研制、改善,“鹞”式从单纯的对地攻击型,发展成具有空战能力的“海鹞”和“鹞 II”。 “鹞”式战斗机不仅在英国空海军服役,还出口到美国、西班牙、泰国、印度,成为战后英国最成功的战斗机。诺斯罗普和 Hawker 的意向书已经过期,Hawker 和这时已经通过“鬼怪”式和 Hawker 有合作的麦克唐纳合作,为美国海军陆战队制造“鹞”式。Bristol Siddeley 被并入当年试图用带推力转向的“双斯贝”搅局的罗尔斯·罗伊斯,Hawker 也和当年的竞争对手德哈维兰、英国通用电气等一起并入英国宇航,真是物是人非。


皇家空军的“猎人”战斗机,反正老了,打不动仗了,就做做秀吧 / 皇家海军的舰载战斗机“海狐”(Sea Vixen)
“鹞”式的名字本来是给 P.1154 的,计划用来取代“猎人”和“海狐” / 这张图比较容易看到采用加力燃烧的前喷管,进气口可以向外张大,以便在垂直起落是加大进气量,在平时则关回去,以减小阻力
P.1154 的 Bristol Siddeley BS.100 发动机
P.1154 已经进入全尺寸模型阶段了,这是发动机喷管转向时的样子 / 第一架 P.1154 的机身已经开始制造
鹞”式是至今唯一参加过实战的垂直起落战斗机。在马岛战争中,作为皇家海军特混舰队唯一的舰载战斗机,“鹞” 式在实战中,创造性地使用推力转向,极大地增强了空战机动能力,打破了高亚音速战斗机难以匹敌超音速战斗机的谜思。采用跳板起飞后,“鹞”式的航程和载重大大增加,极大地增加的实战性能。垂直起落能力使“鹞”式在恶劣气候的出动能力甚至超过弹射起飞、拦阻降落的常规舰载战斗机。“鹞”式不仅在马岛实战中证明了自己的能力,而且重新点燃了中小国海军的航母之梦,成为意大利、西班牙、印度、泰国海军航母舰载机唯一现实的选择。美国海军陆战队是“鹞”式的最大的海外用户。在美国海军陆战队里,“鹞”式称为 AV-8,参加了 91 年的海湾战争、95 年中的波黑和科索沃战争以及 2003 年的伊拉克战争。尽管美国海军最终抛弃了“制海舰”的概念,美国海军陆战队没有完全放弃这个概念,而是把“制海舰”和大型两栖攻击舰结合起来。大型两栖攻击舰的大甲板本来是给垂直登陆的直升机用的,但给“鹞”式用,也同样合适。美国海军陆战队的打算是,在登陆阶段,“鹞”式从两栖攻击舰上出击,提供滩头的局部制空权和近距支援;上陆后,在陆上用钢板铺简易起落场,从陆上出击,随陆战队的地面部队向纵深滚动。然而,在实战中,美国海军陆战队还没有遇到向离岸纵深进攻的需要,在陆地上建造简易机场,也不仅是用钢板铺跑道的问题,还有油料、军械、维修和其他地勤问题,不如直接从两栖攻击舰上出击,所以“鹞”式没有在陆地上前进部署过。不过,“鹞”式的垂直起落能力和跳板起飞要求也给飞行员训练带来更高的要求,垂直起落和跳板起飞都是容易出事故的时候,90 年代,美国海军陆战队曾在不长的时间内在接连损失 45 架“鹞”式,英国皇家海军和空军的“鹞”式也是一样的问题,原因基本上是垂直起落阶段发动机故障或飞行员操作失当。发动机的问题通过不断的技术改进得到解决,飞行员训练也通过双座型“鹞”式逐渐得到解决。


“赫尔姆斯”号航母上的“海鹞”式在恶劣天气中准备起飞 / 油画描绘了“海鹞”正在追击攻击圣卡洛斯湾的英国舰船后撤离的阿根廷“短剑”式战斗机


“海鹞”正在“大西洋运送者”(Atlantic Conveyer)号上着陆,这艘集装箱船临时改装的简易航母后来被阿根廷的飞鱼导弹击沉,随船沉没的还有若干“鹞”式和 CH-47 直升机 / 英国皇家海军的“海鹞”从“无敌”号航母出击,执行伊拉克南方禁飞区任务


美国海军陆战队的 AV-8B 出击后返航伊拉克的 Al Asad 基地 / 英国皇家空军的“鹞”式在伊拉克作夜航出击


AV-8B 在航母上作垂直降落 / 美国海军陆战队的 AV-8B 正在伊拉克沙漠上空作空中加油
用单一的升力-巡航发动机最大限度的避免死重,“雀鹰”/“鹞”式不是第一家。美国的贝尔首先用 X-14 研究机验证了转向喷管产生垂直升力的原理,日后 Hawker 的试飞员 Bill Bedford 在 Ralph Hooper 访美期间,在 X-14 上作过试飞,重点探索垂直起落和水平飞行之间的过渡,对日后“雀鹰”的设计和试飞提供了极其宝贵的第一手资料。苏联的第一架垂直起落研究机雅克-36 也是采用转向喷管。X-14 和雅克-36 遇上共同的问题:为了确保垂直升力的作用点在机体重心附近,发动机必须尽量往前安装,这样就需要一个长长的后机身来平衡发动机的重量,后机身有一个显著的“阶梯”形,大大增加气动阻力,全机布置也极不平衡。为了保证姿态控制,雅克-36 在机头还特地向前延伸出一根又粗又长的杆子,用于安装俯仰控制的喷嘴。西方情报机关一开始对这根长杆的作用十分困惑,有人甚至开玩笑地说,这该不是苏联恢复了海军在风帆时代的冲撞战术,要用这根“长枪”把敌机捅下来吧?这些早期的尝试作为实用型飞机的气动设计并不成功,尽管苏联曾在航展上为雅克-36 象征性地安装过武器,想使之实用化,但是这些早期的经验为后来的“雀鹰”/“鹞”式和雅克-38 提供了思路:采用分叉式尾喷管,从两侧避开后机身,使机身和尾喷管的流线型大大改善。但是这还是不能避免单一升力-巡航发动机的另外一些固有的问题。为了实现垂直起飞,发动机必须具有很大的推力。事实上,“鹞”式战斗机的“飞马”发动机曾经是西方推力最大的战斗机用喷气发动机。但是,为最大推力而优化的发动机对巡航油耗的降低不利。为了最大推力,发动机的核心加大,进气道也必须加大,但巡航时要不了那么大的推力,过大的进气道和发动机造成不必要的阻力和结构重量。由于升力-巡航发动机的特殊结构,极其和机体设计的高度一体化,不经过大动干戈的改动,在别的战斗机上成功应用的新型发动机很难应用到垂直起落战斗机上,所以“鹞”式的“飞马”发动机一用就是40年,尽管罗尔斯.罗伊斯一直在不断改进,但“飞马”的核心发动机依然是 40 年前的 Bristol Orpheus。这个问题直到 F-35 采得到解决。


贝尔 X-14 首先验证了向量推力用作垂直起落的原理,Hawker 的试飞员在 X-14 上获得了宝贵的垂直起落经验,大大帮助了日后 Kestrel 的试飞 / 为了使矢量喷口能够安排在重心附近,两台发动机只能拼命往前放


雅克-36 是苏联第一架真正的垂直起落飞机 / 雅克-36 的发动机布置和贝尔 X-14 相似,也是拼命往前放
机头、机尾和翼尖有姿态控制喷嘴,其中机头的姿态控制喷嘴在延长杆的顶端
英国皇家空军从一开始就是把“鹞”式战斗机作为过渡性的应急之作,最终目标依然是超音速垂直起落战斗机,所以很早就开始研究“鹞”式的后继方案。由于位于 Kingston 的 Hawker 是“鹞”式的始作俑者,“鹞”式的后继方案基本都是在 Kingston 的原 Hawker 的设施里搞的,所以被称为 Kingston Projects。以下是 Kingston Projects 中的一些方案,有些达到具体设计阶段,有些只是初步概念。


超音速垂直起落一直是“鹞”式之后可望而不可及的目标,BAe P.121 采用前掠翼以解决发动机和喷口位置必须处于全机重心的矛盾 / BAe P.1214 的三视图
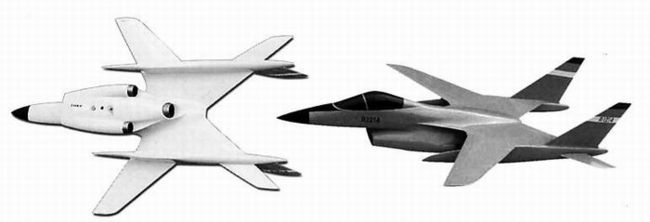
这个模型更清楚地表示了发动机喷口的布置
Hawker-Siddley P.1216 方案,重点在于超音速,格外长的尾撑用于平衡全机重心,主发动机的向量推力喷口可以布置在重心附近
P.1216 的三视图
受到“鹞”式成功的鼓舞,和美国海军在 80 年代“制海舰”设想的驱动,美国航空工业也推出一些意图取代 S-3 舰载反潜机的方案,如图中的洛克希德方案和沃特 V-530 方案,V-530 的双涵道涡扇发动机是其特色,在概念上是洛克希德 F-35 的升力风扇的先驱。

洛克希德的垂直起落舰载机方案

Vought V530 的机翼可以折叠,以减少在航母机库里的占地面积。其双涵道涡扇发动机是其特色,在概念上是洛克希德 F-35 的升力风扇的先驱

V-530 的发动机从垂直起落状态向水平飞行转换 / V-530 意图取代 S-3 舰载反潜机
Kestrel 由英国、美国和德国飞行员共同评估,机尾上就是“三国评估中队”的标志 / 按照设计,Kestrel 要能够在林间空地起落,以实现核大战条件下的分散部署和隐蔽出击。实际使用经验表明,分散部署对地勤支援的要求太高,在战时根本不实际。以后北约战略转向强调高性能战斗机,集中部署,集中保护,强调打击敌人,而不是分散生存
P.1154“鹞”式超音速战斗机下马后,Kestrel 得到进一步发展,作为过渡,“鹞”的名字被转用到这个改进型 Kestrel 上 / “鹞”式的卖点当然还是垂直起落
“鹞”式垂直起飞 / 手动转动向量喷口的示意
“鹞”式垂直起飞时的计算流体力学示意图
进气口旁的辅助进气口,用于垂直起落时增加进气量
在实用中,飞行员发现,如果在垂直起落中有一点前进速度,可以大大降低喷气回吸的影响,图中地面尘土和飞机的相对位置,表明这个飞行员正在向前低速移动 / “鹞”式战斗机上的“飞马”发动机在这张剖视图中清晰可见,其四叉喷口是实现向量推力的关键,但成也萧何,败也萧何,正是这四叉喷口,极大地限制了发动机和飞机的整体布置,而注定了“鹞”式只可能用“飞马”发动机,而不大可能有任何别的替代发动机
罗尔斯·罗伊斯和 BAe 正在试验 PCB(Plenum Combustion Chamber,增压燃烧室)
但是皇家空军对超音速要求还是念念不忘,坚持要求 Hawker 把 P.1127 改进成超音速,否则不会订货,北约也有相应的要求。这倒不是皇家空军和北约出花头,而是大势所趋。60 年代是一个追求高空高速的时代,战术飞机不能达到超音速被看作是一个严重的缺陷。Hawker 将“雀鹰”加长,发动机的前转向喷管采用喷管加力燃烧(Plenum Chamber Burning,简称 PCB)技术,和主发动机的加力推力一起,使飞机达到超音速,P.1127 也因此改名为 P.1154,并正式取名为“鹞”式。在 62 年北约竟标中,P.1154 赢得了技术分,但法国的幻影 III V 赢得了政治分,因为幻影对工作量在北约内均匀分布有利,否则好事全叫英国摊上了。不过最后结果实在也是无关紧要,因为北约并不对赢者拨款,还是要靠成员国自己出资进一步研发。
在英国,军方希望用 P.1154 取代空军的“猎人”和海军的“海狐”(Sea Vixen),但是空军需要的是单座攻击机,海军需要的是双座截击机,很快空军和海军就为了不同的技术、战术要求而争得不可开交。尽管 Hawker 对于在技术上是否可能同时满足空海军的要求根本没有信心,但先把鸭子煮熟,调味以后再说。但钓鱼工程不能瞒过所有人,最后的妥协方案空海军同时拒绝了。63 年底,军方决定海军的舰载战斗机由装备罗尔斯·罗伊斯“斯贝”涡扇发动机的 F-4“鬼怪”式战斗机完成,海军退出“鹞”式计划。“斯贝”日后被中国引进,用于“飞豹”战斗轰炸机,不过这是后话了。Hawker 终于可以轻装上阵了,但这是风水又转了,工党政府对英国航空工业的大砍刀下来,P.1154(和前述 TSR.2)一同下马。不过 Hawker 这一头没有一棍子打死,空军的“猎人”也有“鬼怪”式代替,但是由“雀鹰”配合,作为对地攻击使用,“鹞”的名字也被用于放大的“雀鹰”。“鹞”式在外形上和“雀鹰”十分相似,但要增大一圈,也增加了很多实用的战术装备。但是政府对“鹞”依然三心二意,财政部一算,外购“鬼怪”式和正在和法国合作研制的“美洲豹”(Jaguar)比自研“鹞”是节约一亿三千万英镑。在财政部提议取消“鹞”式的时候,科技部强烈反对再砍硕果仅存的“鹞”式,“鬼怪”式的采购计划由于“斯贝”发动机和“鬼怪”式的进气道适配问题而大大拖延、超支,“鹞”式是这样才躲过了下马的大砍刀。政府对“鹞”式毫无感情,军方对“鹞”式更是充满了敌意,三年前取消“雀鹰”的采购计划时的理由一个也没有改变,皇家空军是把“鹞”式当作过渡性的应急之作。Hawker 就是这样步履维艰地开始了历史上唯一参加过实战的喷气式垂直起落战斗机的研制。经过多年的研制、改善,“鹞”式从单纯的对地攻击型,发展成具有空战能力的“海鹞”和“鹞 II”。 “鹞”式战斗机不仅在英国空海军服役,还出口到美国、西班牙、泰国、印度,成为战后英国最成功的战斗机。诺斯罗普和 Hawker 的意向书已经过期,Hawker 和这时已经通过“鬼怪”式和 Hawker 有合作的麦克唐纳合作,为美国海军陆战队制造“鹞”式。Bristol Siddeley 被并入当年试图用带推力转向的“双斯贝”搅局的罗尔斯·罗伊斯,Hawker 也和当年的竞争对手德哈维兰、英国通用电气等一起并入英国宇航,真是物是人非。
皇家空军的“猎人”战斗机,反正老了,打不动仗了,就做做秀吧 / 皇家海军的舰载战斗机“海狐”(Sea Vixen)
“鹞”式的名字本来是给 P.1154 的,计划用来取代“猎人”和“海狐” / 这张图比较容易看到采用加力燃烧的前喷管,进气口可以向外张大,以便在垂直起落是加大进气量,在平时则关回去,以减小阻力
P.1154 的 Bristol Siddeley BS.100 发动机
P.1154 已经进入全尺寸模型阶段了,这是发动机喷管转向时的样子 / 第一架 P.1154 的机身已经开始制造
鹞”式是至今唯一参加过实战的垂直起落战斗机。在马岛战争中,作为皇家海军特混舰队唯一的舰载战斗机,“鹞” 式在实战中,创造性地使用推力转向,极大地增强了空战机动能力,打破了高亚音速战斗机难以匹敌超音速战斗机的谜思。采用跳板起飞后,“鹞”式的航程和载重大大增加,极大地增加的实战性能。垂直起落能力使“鹞”式在恶劣气候的出动能力甚至超过弹射起飞、拦阻降落的常规舰载战斗机。“鹞”式不仅在马岛实战中证明了自己的能力,而且重新点燃了中小国海军的航母之梦,成为意大利、西班牙、印度、泰国海军航母舰载机唯一现实的选择。美国海军陆战队是“鹞”式的最大的海外用户。在美国海军陆战队里,“鹞”式称为 AV-8,参加了 91 年的海湾战争、95 年中的波黑和科索沃战争以及 2003 年的伊拉克战争。尽管美国海军最终抛弃了“制海舰”的概念,美国海军陆战队没有完全放弃这个概念,而是把“制海舰”和大型两栖攻击舰结合起来。大型两栖攻击舰的大甲板本来是给垂直登陆的直升机用的,但给“鹞”式用,也同样合适。美国海军陆战队的打算是,在登陆阶段,“鹞”式从两栖攻击舰上出击,提供滩头的局部制空权和近距支援;上陆后,在陆上用钢板铺简易起落场,从陆上出击,随陆战队的地面部队向纵深滚动。然而,在实战中,美国海军陆战队还没有遇到向离岸纵深进攻的需要,在陆地上建造简易机场,也不仅是用钢板铺跑道的问题,还有油料、军械、维修和其他地勤问题,不如直接从两栖攻击舰上出击,所以“鹞”式没有在陆地上前进部署过。不过,“鹞”式的垂直起落能力和跳板起飞要求也给飞行员训练带来更高的要求,垂直起落和跳板起飞都是容易出事故的时候,90 年代,美国海军陆战队曾在不长的时间内在接连损失 45 架“鹞”式,英国皇家海军和空军的“鹞”式也是一样的问题,原因基本上是垂直起落阶段发动机故障或飞行员操作失当。发动机的问题通过不断的技术改进得到解决,飞行员训练也通过双座型“鹞”式逐渐得到解决。
“赫尔姆斯”号航母上的“海鹞”式在恶劣天气中准备起飞 / 油画描绘了“海鹞”正在追击攻击圣卡洛斯湾的英国舰船后撤离的阿根廷“短剑”式战斗机
“海鹞”正在“大西洋运送者”(Atlantic Conveyer)号上着陆,这艘集装箱船临时改装的简易航母后来被阿根廷的飞鱼导弹击沉,随船沉没的还有若干“鹞”式和 CH-47 直升机 / 英国皇家海军的“海鹞”从“无敌”号航母出击,执行伊拉克南方禁飞区任务
美国海军陆战队的 AV-8B 出击后返航伊拉克的 Al Asad 基地 / 英国皇家空军的“鹞”式在伊拉克作夜航出击
AV-8B 在航母上作垂直降落 / 美国海军陆战队的 AV-8B 正在伊拉克沙漠上空作空中加油
用单一的升力-巡航发动机最大限度的避免死重,“雀鹰”/“鹞”式不是第一家。美国的贝尔首先用 X-14 研究机验证了转向喷管产生垂直升力的原理,日后 Hawker 的试飞员 Bill Bedford 在 Ralph Hooper 访美期间,在 X-14 上作过试飞,重点探索垂直起落和水平飞行之间的过渡,对日后“雀鹰”的设计和试飞提供了极其宝贵的第一手资料。苏联的第一架垂直起落研究机雅克-36 也是采用转向喷管。X-14 和雅克-36 遇上共同的问题:为了确保垂直升力的作用点在机体重心附近,发动机必须尽量往前安装,这样就需要一个长长的后机身来平衡发动机的重量,后机身有一个显著的“阶梯”形,大大增加气动阻力,全机布置也极不平衡。为了保证姿态控制,雅克-36 在机头还特地向前延伸出一根又粗又长的杆子,用于安装俯仰控制的喷嘴。西方情报机关一开始对这根长杆的作用十分困惑,有人甚至开玩笑地说,这该不是苏联恢复了海军在风帆时代的冲撞战术,要用这根“长枪”把敌机捅下来吧?这些早期的尝试作为实用型飞机的气动设计并不成功,尽管苏联曾在航展上为雅克-36 象征性地安装过武器,想使之实用化,但是这些早期的经验为后来的“雀鹰”/“鹞”式和雅克-38 提供了思路:采用分叉式尾喷管,从两侧避开后机身,使机身和尾喷管的流线型大大改善。但是这还是不能避免单一升力-巡航发动机的另外一些固有的问题。为了实现垂直起飞,发动机必须具有很大的推力。事实上,“鹞”式战斗机的“飞马”发动机曾经是西方推力最大的战斗机用喷气发动机。但是,为最大推力而优化的发动机对巡航油耗的降低不利。为了最大推力,发动机的核心加大,进气道也必须加大,但巡航时要不了那么大的推力,过大的进气道和发动机造成不必要的阻力和结构重量。由于升力-巡航发动机的特殊结构,极其和机体设计的高度一体化,不经过大动干戈的改动,在别的战斗机上成功应用的新型发动机很难应用到垂直起落战斗机上,所以“鹞”式的“飞马”发动机一用就是40年,尽管罗尔斯.罗伊斯一直在不断改进,但“飞马”的核心发动机依然是 40 年前的 Bristol Orpheus。这个问题直到 F-35 采得到解决。
贝尔 X-14 首先验证了向量推力用作垂直起落的原理,Hawker 的试飞员在 X-14 上获得了宝贵的垂直起落经验,大大帮助了日后 Kestrel 的试飞 / 为了使矢量喷口能够安排在重心附近,两台发动机只能拼命往前放
雅克-36 是苏联第一架真正的垂直起落飞机 / 雅克-36 的发动机布置和贝尔 X-14 相似,也是拼命往前放
机头、机尾和翼尖有姿态控制喷嘴,其中机头的姿态控制喷嘴在延长杆的顶端
英国皇家空军从一开始就是把“鹞”式战斗机作为过渡性的应急之作,最终目标依然是超音速垂直起落战斗机,所以很早就开始研究“鹞”式的后继方案。由于位于 Kingston 的 Hawker 是“鹞”式的始作俑者,“鹞”式的后继方案基本都是在 Kingston 的原 Hawker 的设施里搞的,所以被称为 Kingston Projects。以下是 Kingston Projects 中的一些方案,有些达到具体设计阶段,有些只是初步概念。
超音速垂直起落一直是“鹞”式之后可望而不可及的目标,BAe P.121 采用前掠翼以解决发动机和喷口位置必须处于全机重心的矛盾 / BAe P.1214 的三视图
这个模型更清楚地表示了发动机喷口的布置
Hawker-Siddley P.1216 方案,重点在于超音速,格外长的尾撑用于平衡全机重心,主发动机的向量推力喷口可以布置在重心附近
P.1216 的三视图
受到“鹞”式成功的鼓舞,和美国海军在 80 年代“制海舰”设想的驱动,美国航空工业也推出一些意图取代 S-3 舰载反潜机的方案,如图中的洛克希德方案和沃特 V-530 方案,V-530 的双涵道涡扇发动机是其特色,在概念上是洛克希德 F-35 的升力风扇的先驱。
洛克希德的垂直起落舰载机方案
Vought V530 的机翼可以折叠,以减少在航母机库里的占地面积。其双涵道涡扇发动机是其特色,在概念上是洛克希德 F-35 的升力风扇的先驱
V-530 的发动机从垂直起落状态向水平飞行转换 / V-530 意图取代 S-3 舰载反潜机
进入 90 年代,美国空军的 F-16A/B 已经开始大批退役,A-10 的替代也早就上了议事日程,美国海军的 F-18A/B 也是一样。更紧迫的是海军陆战队的 AV-8B,空军的 F-22 已经落实了,海军的 F-18E 也落实了,但海军陆战队的 AV-8B 面临后继无人的窘况。面对三军都需要 F-16/F-18/AV-8 这一级的下一代战斗机,美国国会指令三军联合研制,这就是“联合打击战斗机”(Joing Strike Fighter,简称 JSF)的起源。JSF 要求能够作为 F-22 和 F-18E 的低档搭配,并且具有垂直/短距起落能力,以接替 AV-8B,为此,JSF 具有陆基型、舰载型和垂直起落型,共用基本机体设计和发动机。JSF 难度最大的地方,在于在严格控制成本和风险的前提下,要求具有垂直起落能力。普拉特.惠特尼的 F119 发动机已经用于 F-22,被军方指定为 JSF 的基本发动机,通用电气的 F120 作为备选发动机低速发展。这里必须对美国航空发动机的研发能力敬佩一下,普拉特.惠特尼从 F119 基本发动机出发,一方面大大增加推力以满足垂直起落的要求,另一方面左右开弓,同时满足 JSF 所有方案的不同垂直起落方案,这个功力非同小可。 麦道、波音和洛克希德分别提交了方案。麦道的方案采用单独的升力发动机,在气动布局上为无垂尾的 V 形尾方案,机翼后缘呈 M 形,可以说是空军的“先进技术战斗机”ATF 竞争中落选的 YF-23 的缩小版。采用单独的升力发动机有利于降低动力系统的研制风险,通过适当的安排,在主发动机故障或战损时,升力发动机可以使飞机安全返航,至少在理论上可以实现这样的动力备份。麦道方案的机翼设计很有新意,机翼和尾翼之间的“边条”既强化翼身融合体,又在大迎角时起到升力体的作用,是神来之笔。但垂直起落设计了无新意,死重大,成本高。最大的问题还是在 V 形尾。V 形尾重量轻,隐身好,阻力小,但 V 形尾一动,在滚转和偏航上就有交联,对飞行控制系统的要求很高,对机动性的影响也大,YF-23 就是栽在这上面。麦道的方案在还没有进入最后的对比试飞前就被淘汰了。JSF 落选对麦道是致命的,这个曾经研制 F-4、F-15,主要承包 F-18、AV-8 的公司,就这样降下了帷幕。

麦道 JSF 的方案可以看到 YF-23 的很多影子,尤其是它的 V 形尾

但麦道 JSF 的进气道有很重的 F-22 的影子 / 其升力发动机在理论上可以在主发动机故障或战损的时候,单独将飞机返航回去

麦道在情急之中,增加了鸭翼,力图弥补 V 形尾控制不足的问题,但为时已晚
尽管波音在二战之前就再也没有得到过美国战斗机的订单,但波音对所有战斗机竞争从不放过,屡败屡战。正因为没有历史,波音也就没有包袱,设计方案就敢于另类。波音 JSF 方案是一反美国常规的大三角翼方案,采用和“鹞”式相似的升力-巡航发动机,其血盆大口一般的超大进气道十分引人注目。由于发动机要尽量前置,进气道只能又大又短,这给隐身带来很大的问题。波音用“雷达屏障”(radar blocker)来解决,就是在进气道中用涂覆雷达吸波材料的导流片使进气气流有一定的扭转后才进入风扇正面,而这扭转就有效地阻止电磁波长驱直入,多次折射、反射的电磁波被反复吸收能量,最后反射回入射方向时能量已经大大降低,达到降低雷达特征的效果。麦道的 F-18E 的进气道也是采用了类似的技术,才达到准隐身效果的。导流片的另外一个作用是将进气气流理顺,增加风扇的效率。缺点是结构重量,和导流片产生的进气压力损失。波音 JSF 得到最后对比试飞的资格,代号为 X-32。X-32 的 F119 改型增加了前转向喷嘴以产生机体重心处的垂直升力,其后是延长的尾喷管,在机尾喷气,尾喷管可以推力转向,但用于改善机动性,而不是用于产生垂直升力。事实上,在垂直起落是,主要垂直升力由前喷嘴实现,姿态控制喷嘴实现其余的升力,尾喷管关闭。X-32 的 F119 还有一个特色:从发动机风扇引出高压空气,在前机体下方向下喷射,形成气帘,阻止炽热喷气回流到进气口。发动机上所有和垂直起落有关的额外系统总重约 300 公斤。X-32 肥厚、宽大的机翼为机内燃油提供了极大的容积,机翼翼载小,机动性相当好。X-32 的问题在于过于围绕垂直起落性能而设计,常规起落的性能损失太大。海军对此尤其敏感,对无尾三角翼布局极力反对,因为航母上起落所必需的大迎角性能难以得到保证。波音试图亡羊补牢,在最后时刻将 X-32 改称有尾布局,但为时已晚。


波音 JSF 最大的特点有两个:一个是无尾三角翼,这是康维尔
F-106
后第一架美国的无尾三角翼战斗机 / 第二个特点是其超大的进气道,这是采用机内的升力-巡航发动机所必需,但对前向隐身带来很大的挑战


波音 JSF 的肥大的机体对布置武器舱十分有利 / 但波音 JSF 也是美国现代航空史上少有的丑陋
波音 X-32 的垂直升力机制基本和“鹞”式同出一辙,不同的是后向喷管一直延伸到机尾,在垂直起落时,使用偏转装置,从机身重心附近就“提前”喷射出来,这样对后机身气动设计比较容易 / 悬停中的 X-32,不容易看到的是,进气口稍后的地方,有一个辅助喷口,有压气机导出高压空气,向下喷射一道冷空气帘,用于阻隔炽热喷气的回吸

波音和洛克希德的不同的 F119 发动机变形,其中蓝色的部分为基本发动机,黄色部分为垂直起落专用的扩充部分

波音方案的 F119 发动机,可以看到其转向喷嘴和气帘喷射装置

海军对 短距起落和大迎角性能特别讲究,强烈反对波音 X-32 的无尾三角翼布局 / 面对海军的强烈反对,波音在最后时刻将 X-32 的无尾三角翼改称有尾,从根本上打乱了设计进程,也对用户带来很大的混乱
但 X-32 的“超级大嘴”依然保留,给关注隐身的人们带来极大的疑惑
麦道 JSF 的方案可以看到 YF-23 的很多影子,尤其是它的 V 形尾
但麦道 JSF 的进气道有很重的 F-22 的影子 / 其升力发动机在理论上可以在主发动机故障或战损的时候,单独将飞机返航回去
麦道在情急之中,增加了鸭翼,力图弥补 V 形尾控制不足的问题,但为时已晚
尽管波音在二战之前就再也没有得到过美国战斗机的订单,但波音对所有战斗机竞争从不放过,屡败屡战。正因为没有历史,波音也就没有包袱,设计方案就敢于另类。波音 JSF 方案是一反美国常规的大三角翼方案,采用和“鹞”式相似的升力-巡航发动机,其血盆大口一般的超大进气道十分引人注目。由于发动机要尽量前置,进气道只能又大又短,这给隐身带来很大的问题。波音用“雷达屏障”(radar blocker)来解决,就是在进气道中用涂覆雷达吸波材料的导流片使进气气流有一定的扭转后才进入风扇正面,而这扭转就有效地阻止电磁波长驱直入,多次折射、反射的电磁波被反复吸收能量,最后反射回入射方向时能量已经大大降低,达到降低雷达特征的效果。麦道的 F-18E 的进气道也是采用了类似的技术,才达到准隐身效果的。导流片的另外一个作用是将进气气流理顺,增加风扇的效率。缺点是结构重量,和导流片产生的进气压力损失。波音 JSF 得到最后对比试飞的资格,代号为 X-32。X-32 的 F119 改型增加了前转向喷嘴以产生机体重心处的垂直升力,其后是延长的尾喷管,在机尾喷气,尾喷管可以推力转向,但用于改善机动性,而不是用于产生垂直升力。事实上,在垂直起落是,主要垂直升力由前喷嘴实现,姿态控制喷嘴实现其余的升力,尾喷管关闭。X-32 的 F119 还有一个特色:从发动机风扇引出高压空气,在前机体下方向下喷射,形成气帘,阻止炽热喷气回流到进气口。发动机上所有和垂直起落有关的额外系统总重约 300 公斤。X-32 肥厚、宽大的机翼为机内燃油提供了极大的容积,机翼翼载小,机动性相当好。X-32 的问题在于过于围绕垂直起落性能而设计,常规起落的性能损失太大。海军对此尤其敏感,对无尾三角翼布局极力反对,因为航母上起落所必需的大迎角性能难以得到保证。波音试图亡羊补牢,在最后时刻将 X-32 改称有尾布局,但为时已晚。
波音 JSF 最大的特点有两个:一个是无尾三角翼,这是康维尔
F-106
后第一架美国的无尾三角翼战斗机 / 第二个特点是其超大的进气道,这是采用机内的升力-巡航发动机所必需,但对前向隐身带来很大的挑战
波音 JSF 的肥大的机体对布置武器舱十分有利 / 但波音 JSF 也是美国现代航空史上少有的丑陋
波音 X-32 的垂直升力机制基本和“鹞”式同出一辙,不同的是后向喷管一直延伸到机尾,在垂直起落时,使用偏转装置,从机身重心附近就“提前”喷射出来,这样对后机身气动设计比较容易 / 悬停中的 X-32,不容易看到的是,进气口稍后的地方,有一个辅助喷口,有压气机导出高压空气,向下喷射一道冷空气帘,用于阻隔炽热喷气的回吸
波音和洛克希德的不同的 F119 发动机变形,其中蓝色的部分为基本发动机,黄色部分为垂直起落专用的扩充部分
波音方案的 F119 发动机,可以看到其转向喷嘴和气帘喷射装置
海军对 短距起落和大迎角性能特别讲究,强烈反对波音 X-32 的无尾三角翼布局 / 面对海军的强烈反对,波音在最后时刻将 X-32 的无尾三角翼改称有尾,从根本上打乱了设计进程,也对用户带来很大的混乱
但 X-32 的“超级大嘴”依然保留,给关注隐身的人们带来极大的疑惑
脊背那么高,会不会影响飞行员的后向视线? / 洛克希德 JSF 在气动设计上最大的特点就是 DSI 进气道,用一个精心设计的鼓包而不是常见的边界层分离板来泄放机体和进气道结合部的呆滞气流,即改善了隐身,也提高了进气道的效率

洛克希德 JSF 的升力风扇既避免了升力-巡航发动机对发动机位置的局限,又避免了升力发动机对高温喷气回吸的问题,图中可以看到已经打开的升力风扇和垂直起落是专用的主发动机的辅助进气门 / 对比 F-35 的垂直起落,和雅克-41 非常相像,不同的是,F-35 采用轴传动的升力风扇,而不是专用的升力发动机
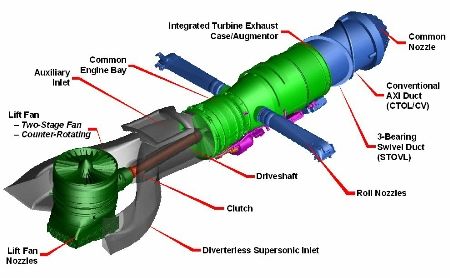
洛克希德方案的 F119 发动机,可以看到轴驱动的升力风扇

三轴转动的尾喷管,这是雅可夫列夫影响最显著的地方

罗尔斯,罗伊斯负责的升力风扇,其喷口可以延伸和向后,如果这是单独的升力发动机,不难想象它可以在主发动机故障的情况下,单独推动飞机返航 / 升力风扇正在准备试验,可以和旁边的人比较一下尺寸
洛克希德 F-35 的垂直起落机制示意图,可以清楚地看到可以偏转的尾喷管、前升力风扇和传动轴
洛克希德曾经想用更先进的喷气驱动升力风扇(下),但技术上风险太大,最后还是用比较保险的轴驱动风扇(上)
F-35 和 F-16、F-22 的对比

空军的 F-35A,只有常规跑道起落能力,不具备垂直起落能力,原用于升力风扇的体积改用于机内油箱,大大增加了航程和载弹能力

洛克希德 JSF 基本就是 F-22 的缩小版。洛克希德 JSF 在早期曾经设想过用鸭式布局,但不久就放弃了,回到驾轻就熟的常规布局,采用与 F-22 相似的菱形翼和外倾的双垂尾,此外并无惊人之笔。不过在性能上比较平衡,不会出大的意外,符合 JSF 最低风险和成本的原则。在气动设计上,洛克希德 JSF 的最大特点是“无边界层分离板超音速进气道”(Diverterless Supersonic Intake,简称 DSI),既改善了隐身,又提高了进气效率。洛克希德为了少走弯路,早早和雅可夫列夫合作,吸取前者在垂直起落战斗机研制上的经验,最后方案和雅克-41 有相似之处也就不奇怪了。洛克希德 JSF 采用升力风扇加升力-巡航发动机的方案,不过在升力风扇的驱动方式上有过一段犹豫,最后采用了技术上比较成熟的轴驱动,配以号称世界上最强大的离合器,在不用垂直升力的时候,离合器将驱动轴和升力风扇脱开。洛克希德最初是想用喷气驱动的升力风扇的,也就是说,将低压压气机后的压缩空气引出一股,折向前面,驱动升力风扇。驱动方式可以向轴心的涡轮吹气以驱动风扇,或者向升力风扇的翼尖吹气,像驱动水轮一样,也就是所谓的 tip jet 方式。喷气驱动的好处是省却沉重、复杂、维修麻烦的驱动轴和离合器,可靠性好,但喷气驱动需要在机体内布置可以通过很大流量的高压空气管路,占用空间太大,最后还是放弃了。洛克希德 JSF 也进入了对比试飞,代号 X-35,并最终赢得 JSF 的合同,代号改称 F-35。洛克希德由此成为 21 世纪美国唯一研制新战斗机的公司,波音通过麦道的关系还在制造 F-18E/F,但在 F-22 上只有转包商的份,F-35 则一点份也没有。F-35 将分三个基本型:空军的 A 型取消升力风扇,空下的体积用于更多的机内燃油的设备;海军陆战队的 B 型,具有垂直起落能力;海军的 C 型,为航母起落增大了机翼和尾翼。英国已经肯定加入 F-35 计划,很多国家有意用 F-35 作为 F-16 或 F-18 的后继,但美国对 F-35 的生产采用“赢者通吃”,而不是入股分工,并对敏感技术的转让限制重重,可能给 F-35 的外销带来一定的问题。不管怎么说,如果不出意外的话,F-35 将是未来二、三十年唯一的实战型垂直起落战斗机,其重要性不言而喻。

洛克希德 JSF 基本就是缩小的 F-22 / 这个角度看,几乎就是 YF-22 的翻版

海军陆战队的 F-35B,具有垂直起落能力,加宽机背以安装升力风扇

海军的 F-35C,具有航母起落能力,但不具备垂直起落能力,加大机翼和尾翼,以适应航母上低速、大迎角起落的要求

F-35 个型号的共同性


F-35 结构解剖图 / X-35B 和伴飞的 AV-8B,两者的机内容积的差别显而易见,这反映到机内载油上,对航程的影响就大了

X-35B 在作垂直起落,可以看到已经打开的升力风扇和辅助进气口
在战后 60 年里,航空技术的发展不可以里计,超音速飞行、越洋飞行早已不成问题,但基本的原理级的技术没有大变,依然是使用动力产生速度,有空气和固定机翼的相对速度产生升力。回顾垂直起落飞机 60 年的历史,人们尝试的各种升力原理不计其数,其中不乏创造性思维的火花,但除了各种直升机外,达到实用阶段的垂直起落飞机寥寥可数。文中当然不可能罗列所有的设计,下图就是一些漏网的例子。尽管人们在垂直起落飞机领域屡败屡战,每一个失败的例子就指明了一条走不通的路,这是非常宝贵的经验积累。都说 21 世纪将是中国的世纪,这应该包括中国的航空技术,幸运青睐于有准备的人们,中国的航空人是否准备好了呢?
可以折起桨叶的旋翼不是新想法,法国 Sud Aviation 在 50 年代就有过这样的想法


更疯狂的是这个 Ryan 的 F-104VTOL 方案 / 三角翼的翼尖像全动平尾一样,可以改变迎角,旋转时可以像直升机一样产生升力,固定了就是三角翼

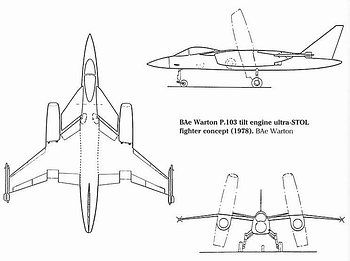
BAe P.103 方案,采用倾转的翼下喷气发动机,可以实现超短距起飞和垂直降落,即所谓 STOVL(short take off and vertical landing) / P.103 三视图

据说美国也对 P.103 表示兴趣,这是美国空军涂装的 P.103 想象图,和上面的 P.103 略有不同
从纯倾转喷气退一步,将倾转喷气和专用升力发动机混合使用,可以增加发动机布置上的灵活性。这样可以降低对升力-巡航发动机的推力要求,缓解工作条件,延长寿命,另外增加专用的升力发动机作为升力-巡航发动机的补充,用于短时间的垂直起落。在冷战高峰的 60 年代,西德作为抵御上万辆苏军坦克和几千架作战飞机的前沿,面临作战机场在第一时间被全面摧毁的现实危险,着力研制垂直/短距起落作战飞机,曾有计划组建一支“全垂直/短距起落化”的空军,其战斗机部分称为
VJ-101
,最后获选的方案就是由 Messerschmitt、Heinkel 和 Bolkow 合组的 EWR(Entwicklungsrin)提出的,采用倾转喷气和巡航喷气发动机相结合的混合方案,采用翼尖倾转升力-巡航发动机加座舱后机身内的专用升力发动机。从实现垂直起落的角度来说,VJ-101 的设计是成功的,也能够达到超音速,但 VJ-101 遇到后来喷气式垂直起落飞机共有的问题:炽热的喷气在地面反弹,然后被发动机重新吸入,极大地影响了发动机的正常工作。炽热喷流对地面的烧蚀是另一个严重的问题。同时,垂直起落耗油极大,对载弹和航程的影响太大,以至于“鹞”式战斗机的前身“鹰”式(Kestrel)被戏称除了飞行员外,只能载一包香烟,航程只够绕小城飞一圈。VJ-101 也有同样的航程问题。很快,VJ-101 的飞行员们就发现,短短的滑跑可以极大地缓解炽热喷流回吸(hot exhaust re-ingestion)问题,同时减轻对地面的烧蚀,也大大增加了载弹和航程。然而,垂直起落的要求对战斗机的性能影响还是太大,VJ-101 不足以对付性能日益增高的苏联战斗机。分散部署在事实上也证明不实际,分散部署远远不是能够在林中空地垂直起落那么简单,分散的地勤和指挥体系没法保证高烈度条件下的作战节奏,北约空军的战略思想由分散部署的低性能战斗机转向集中部署高性能战斗机,由机场的钢筋混凝土加强掩蔽部保护,增加生存力,VJ-101 下马了。

Heinkel He 231 的翼尖倾转升力-巡航发动机是 VJ-101 的翼尖发动机的灵感的来源
Messerschmitt P 1227 方案,比较循规蹈矩,图中横七竖八的管道是升力-巡航发动机尾喷管中断引出的向下的推力偏转喷管,由关闭尾喷管产生升力

采用 4 台升力-巡航发动机加一台升力发动机

VJ-101 是 He 231 和 P1227 的结合,和 F-104 有几分相似。本来嘛,VJ-101 就是取代 F-104 的 / 每侧翼尖有两个一组的升力-巡航发动机


翼尖发动机倾转,就可以实现垂直起落 / 德国空军对 VJ-101 的垂直起落能力寄予极大的希望,意图实现分散部署,极大地增加作战弹性,减低对容易遭到集中打击的机场的依赖

光靠翼尖的升力发动机还不够,还有座舱后的专用升力发动机帮忙 / VJ-101 完成了很多次垂直起落、悬停到平飞的转换
VJ-101 也是德国航空工业凤凰涅磐的希望,但这个希望最终没有实现
VJ-101 下马后,为了大幅度提高垂直起落战斗机的性能,EWR 在美国、北约和德国的资助下,转入“先进垂直攻击机”(Advanced Vertical Strike,简称 AVS)的研究。为了避免升力发动机对气动外形的影响,AVS 别出心裁地将升力发动机装在可伸缩的支架上,在垂直起落时伸出去,减轻反射喷流对机身的烧蚀。机身背部的进气道可以缓解高温喷气回吸的问题,但可能带来大过载机动时进气道气流畸变的问题,限制机动能力。后机身的升力-巡航发动机采用推力转向喷管,减少死重。AVS 还采用 70 年代时髦的可变后略翼技术,意图极大地提高性能。但这样集中地采用高风险、高重量的技术,最后无疾而终并不奇怪。AVS 也下马后,德国最后和英国、意大利一起,转入“多任务作战飞机”(Multi-Role Combat Aircraft,简称 MRCA),这就是后来的“狂风”战斗轰炸机。

VJ-101 下马后,EWR 继续研究新的垂直起落战斗机方案,多采用背部进气道。这不是出于现在的隐身考虑,而是让开地方,为升力发动机腾地方,同时缓解下洗喷气回流吸入发动机的问题


美国海军对 AVS(Advanced Vertical Strike)也一度很有兴趣 / AVS 垂直起落时的情景

AVS 的三视图,可以看到 AVS 不光垂直起落,还具有可变后略翼,其重量可想而知
翼尖倾转的升力-巡航发动机不是 Heinkel 的专利,美国的贝尔在同期也在研制 XF-109(也称 D-188),同样采用两两一组的翼尖倾转的升力-巡航发动机,在座舱后另有两台专用的升力发动机,特别的地方是,在机尾另有两台专用的巡航发动机,全机共有 8 台通用电气的 J85 涡喷发动机,其中翼尖和机尾的 6 台有加力。这是和 F-5 战斗机上相同的发动机,而不是专用的升力发动机。XF-109 只达到全尺寸模型阶段就下马了,那么多发动机的成本、维修和可靠性都是问题。

美国空军本来准备将 XF-109 作为 F-104 的后继,两者都有几分相像

XF-109 全尺寸模型
洛克希德 JSF 的升力风扇既避免了升力-巡航发动机对发动机位置的局限,又避免了升力发动机对高温喷气回吸的问题,图中可以看到已经打开的升力风扇和垂直起落是专用的主发动机的辅助进气门 / 对比 F-35 的垂直起落,和雅克-41 非常相像,不同的是,F-35 采用轴传动的升力风扇,而不是专用的升力发动机
洛克希德方案的 F119 发动机,可以看到轴驱动的升力风扇
三轴转动的尾喷管,这是雅可夫列夫影响最显著的地方
罗尔斯,罗伊斯负责的升力风扇,其喷口可以延伸和向后,如果这是单独的升力发动机,不难想象它可以在主发动机故障的情况下,单独推动飞机返航 / 升力风扇正在准备试验,可以和旁边的人比较一下尺寸
洛克希德 F-35 的垂直起落机制示意图,可以清楚地看到可以偏转的尾喷管、前升力风扇和传动轴
洛克希德曾经想用更先进的喷气驱动升力风扇(下),但技术上风险太大,最后还是用比较保险的轴驱动风扇(上)
F-35 和 F-16、F-22 的对比
空军的 F-35A,只有常规跑道起落能力,不具备垂直起落能力,原用于升力风扇的体积改用于机内油箱,大大增加了航程和载弹能力
洛克希德 JSF 基本就是 F-22 的缩小版。洛克希德 JSF 在早期曾经设想过用鸭式布局,但不久就放弃了,回到驾轻就熟的常规布局,采用与 F-22 相似的菱形翼和外倾的双垂尾,此外并无惊人之笔。不过在性能上比较平衡,不会出大的意外,符合 JSF 最低风险和成本的原则。在气动设计上,洛克希德 JSF 的最大特点是“无边界层分离板超音速进气道”(Diverterless Supersonic Intake,简称 DSI),既改善了隐身,又提高了进气效率。洛克希德为了少走弯路,早早和雅可夫列夫合作,吸取前者在垂直起落战斗机研制上的经验,最后方案和雅克-41 有相似之处也就不奇怪了。洛克希德 JSF 采用升力风扇加升力-巡航发动机的方案,不过在升力风扇的驱动方式上有过一段犹豫,最后采用了技术上比较成熟的轴驱动,配以号称世界上最强大的离合器,在不用垂直升力的时候,离合器将驱动轴和升力风扇脱开。洛克希德最初是想用喷气驱动的升力风扇的,也就是说,将低压压气机后的压缩空气引出一股,折向前面,驱动升力风扇。驱动方式可以向轴心的涡轮吹气以驱动风扇,或者向升力风扇的翼尖吹气,像驱动水轮一样,也就是所谓的 tip jet 方式。喷气驱动的好处是省却沉重、复杂、维修麻烦的驱动轴和离合器,可靠性好,但喷气驱动需要在机体内布置可以通过很大流量的高压空气管路,占用空间太大,最后还是放弃了。洛克希德 JSF 也进入了对比试飞,代号 X-35,并最终赢得 JSF 的合同,代号改称 F-35。洛克希德由此成为 21 世纪美国唯一研制新战斗机的公司,波音通过麦道的关系还在制造 F-18E/F,但在 F-22 上只有转包商的份,F-35 则一点份也没有。F-35 将分三个基本型:空军的 A 型取消升力风扇,空下的体积用于更多的机内燃油的设备;海军陆战队的 B 型,具有垂直起落能力;海军的 C 型,为航母起落增大了机翼和尾翼。英国已经肯定加入 F-35 计划,很多国家有意用 F-35 作为 F-16 或 F-18 的后继,但美国对 F-35 的生产采用“赢者通吃”,而不是入股分工,并对敏感技术的转让限制重重,可能给 F-35 的外销带来一定的问题。不管怎么说,如果不出意外的话,F-35 将是未来二、三十年唯一的实战型垂直起落战斗机,其重要性不言而喻。
洛克希德 JSF 基本就是缩小的 F-22 / 这个角度看,几乎就是 YF-22 的翻版
海军陆战队的 F-35B,具有垂直起落能力,加宽机背以安装升力风扇
海军的 F-35C,具有航母起落能力,但不具备垂直起落能力,加大机翼和尾翼,以适应航母上低速、大迎角起落的要求
F-35 个型号的共同性
F-35 结构解剖图 / X-35B 和伴飞的 AV-8B,两者的机内容积的差别显而易见,这反映到机内载油上,对航程的影响就大了
X-35B 在作垂直起落,可以看到已经打开的升力风扇和辅助进气口
在战后 60 年里,航空技术的发展不可以里计,超音速飞行、越洋飞行早已不成问题,但基本的原理级的技术没有大变,依然是使用动力产生速度,有空气和固定机翼的相对速度产生升力。回顾垂直起落飞机 60 年的历史,人们尝试的各种升力原理不计其数,其中不乏创造性思维的火花,但除了各种直升机外,达到实用阶段的垂直起落飞机寥寥可数。文中当然不可能罗列所有的设计,下图就是一些漏网的例子。尽管人们在垂直起落飞机领域屡败屡战,每一个失败的例子就指明了一条走不通的路,这是非常宝贵的经验积累。都说 21 世纪将是中国的世纪,这应该包括中国的航空技术,幸运青睐于有准备的人们,中国的航空人是否准备好了呢?
可以折起桨叶的旋翼不是新想法,法国 Sud Aviation 在 50 年代就有过这样的想法
更疯狂的是这个 Ryan 的 F-104VTOL 方案 / 三角翼的翼尖像全动平尾一样,可以改变迎角,旋转时可以像直升机一样产生升力,固定了就是三角翼
BAe P.103 方案,采用倾转的翼下喷气发动机,可以实现超短距起飞和垂直降落,即所谓 STOVL(short take off and vertical landing) / P.103 三视图
据说美国也对 P.103 表示兴趣,这是美国空军涂装的 P.103 想象图,和上面的 P.103 略有不同
从纯倾转喷气退一步,将倾转喷气和专用升力发动机混合使用,可以增加发动机布置上的灵活性。这样可以降低对升力-巡航发动机的推力要求,缓解工作条件,延长寿命,另外增加专用的升力发动机作为升力-巡航发动机的补充,用于短时间的垂直起落。在冷战高峰的 60 年代,西德作为抵御上万辆苏军坦克和几千架作战飞机的前沿,面临作战机场在第一时间被全面摧毁的现实危险,着力研制垂直/短距起落作战飞机,曾有计划组建一支“全垂直/短距起落化”的空军,其战斗机部分称为
VJ-101
,最后获选的方案就是由 Messerschmitt、Heinkel 和 Bolkow 合组的 EWR(Entwicklungsrin)提出的,采用倾转喷气和巡航喷气发动机相结合的混合方案,采用翼尖倾转升力-巡航发动机加座舱后机身内的专用升力发动机。从实现垂直起落的角度来说,VJ-101 的设计是成功的,也能够达到超音速,但 VJ-101 遇到后来喷气式垂直起落飞机共有的问题:炽热的喷气在地面反弹,然后被发动机重新吸入,极大地影响了发动机的正常工作。炽热喷流对地面的烧蚀是另一个严重的问题。同时,垂直起落耗油极大,对载弹和航程的影响太大,以至于“鹞”式战斗机的前身“鹰”式(Kestrel)被戏称除了飞行员外,只能载一包香烟,航程只够绕小城飞一圈。VJ-101 也有同样的航程问题。很快,VJ-101 的飞行员们就发现,短短的滑跑可以极大地缓解炽热喷流回吸(hot exhaust re-ingestion)问题,同时减轻对地面的烧蚀,也大大增加了载弹和航程。然而,垂直起落的要求对战斗机的性能影响还是太大,VJ-101 不足以对付性能日益增高的苏联战斗机。分散部署在事实上也证明不实际,分散部署远远不是能够在林中空地垂直起落那么简单,分散的地勤和指挥体系没法保证高烈度条件下的作战节奏,北约空军的战略思想由分散部署的低性能战斗机转向集中部署高性能战斗机,由机场的钢筋混凝土加强掩蔽部保护,增加生存力,VJ-101 下马了。
Heinkel He 231 的翼尖倾转升力-巡航发动机是 VJ-101 的翼尖发动机的灵感的来源
Messerschmitt P 1227 方案,比较循规蹈矩,图中横七竖八的管道是升力-巡航发动机尾喷管中断引出的向下的推力偏转喷管,由关闭尾喷管产生升力
采用 4 台升力-巡航发动机加一台升力发动机
VJ-101 是 He 231 和 P1227 的结合,和 F-104 有几分相似。本来嘛,VJ-101 就是取代 F-104 的 / 每侧翼尖有两个一组的升力-巡航发动机
翼尖发动机倾转,就可以实现垂直起落 / 德国空军对 VJ-101 的垂直起落能力寄予极大的希望,意图实现分散部署,极大地增加作战弹性,减低对容易遭到集中打击的机场的依赖
光靠翼尖的升力发动机还不够,还有座舱后的专用升力发动机帮忙 / VJ-101 完成了很多次垂直起落、悬停到平飞的转换
VJ-101 也是德国航空工业凤凰涅磐的希望,但这个希望最终没有实现
VJ-101 下马后,为了大幅度提高垂直起落战斗机的性能,EWR 在美国、北约和德国的资助下,转入“先进垂直攻击机”(Advanced Vertical Strike,简称 AVS)的研究。为了避免升力发动机对气动外形的影响,AVS 别出心裁地将升力发动机装在可伸缩的支架上,在垂直起落时伸出去,减轻反射喷流对机身的烧蚀。机身背部的进气道可以缓解高温喷气回吸的问题,但可能带来大过载机动时进气道气流畸变的问题,限制机动能力。后机身的升力-巡航发动机采用推力转向喷管,减少死重。AVS 还采用 70 年代时髦的可变后略翼技术,意图极大地提高性能。但这样集中地采用高风险、高重量的技术,最后无疾而终并不奇怪。AVS 也下马后,德国最后和英国、意大利一起,转入“多任务作战飞机”(Multi-Role Combat Aircraft,简称 MRCA),这就是后来的“狂风”战斗轰炸机。
VJ-101 下马后,EWR 继续研究新的垂直起落战斗机方案,多采用背部进气道。这不是出于现在的隐身考虑,而是让开地方,为升力发动机腾地方,同时缓解下洗喷气回流吸入发动机的问题
美国海军对 AVS(Advanced Vertical Strike)也一度很有兴趣 / AVS 垂直起落时的情景
AVS 的三视图,可以看到 AVS 不光垂直起落,还具有可变后略翼,其重量可想而知
翼尖倾转的升力-巡航发动机不是 Heinkel 的专利,美国的贝尔在同期也在研制 XF-109(也称 D-188),同样采用两两一组的翼尖倾转的升力-巡航发动机,在座舱后另有两台专用的升力发动机,特别的地方是,在机尾另有两台专用的巡航发动机,全机共有 8 台通用电气的 J85 涡喷发动机,其中翼尖和机尾的 6 台有加力。这是和 F-5 战斗机上相同的发动机,而不是专用的升力发动机。XF-109 只达到全尺寸模型阶段就下马了,那么多发动机的成本、维修和可靠性都是问题。
美国空军本来准备将 XF-109 作为 F-104 的后继,两者都有几分相像
XF-109 全尺寸模型