裸奔程序之UART
实验实现功能:利用TQ2440开发板与PC机通过UART通信方式实现通信。
——————————————————————————————————————
#define GLOBAL_CLK 1
#include "def.h"
#include "2440addr.h"
#include "2440lib.h"
void CalcBusClk(void);
void Main()
{
char string[256];
rMPLLCON =(92<<12)|(1<<4)|1; //设置FCLK为400M
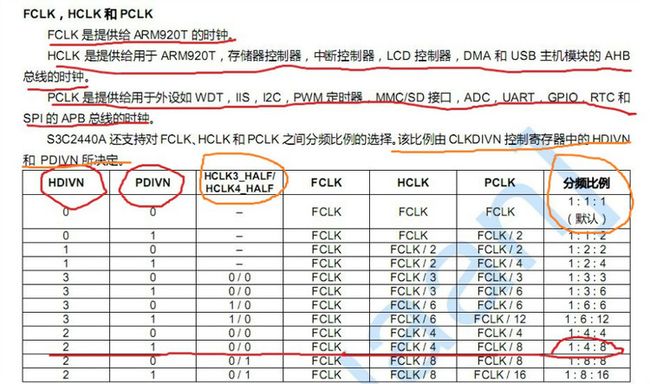
ChangeClockDivider(2,1); //这个函数在2440lib.c中定义的,设置分频比为1:4:8
CalcBusClk(); //计算总线频率
Uart_Select (0); //选择串口0
Uart_Init (0,115200); // 0代表使用当前的PCLK ,115200是波特率
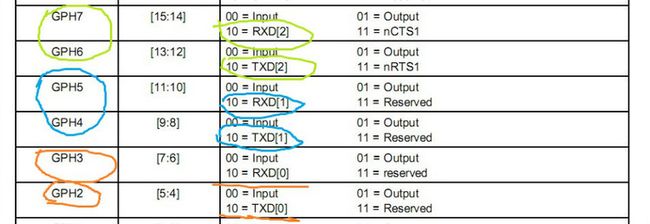
rGPHCON &=~((3<<4)|(3<<6));
rGPHCON |=(2<<4)|(2<<6); //把GPH3、GPH2设置为RXD[0] 、TXD[0] 功能
Uart_Printf("\n This is an uart test,write by lwj\n"); //串口上打印
while(1)
{
Uart_Printf("please,input string\n") ; //这些函数都是在2440lib.c 中定义的
Uart_GetString(string); //获取输入的字符
Uart_Printf("you input string: %s\r\n",string); //打印出输入的字符
}
}
void CalcBusClk(void) //计算总线频率
{
U32 val,UPLL;
U8 m, p, s;
val = rMPLLCON;
m = (val >> 12) & 0xff;
p = (val >> 4) & 0x3f;
s = val & 3;
FCLK = ((m+8)*(FIN/100)*2)/((p+2)*(1<<s))*100;
val = rCLKDIVN;
m = (val >> 1) & 3;
p = val & 1;
val = rCAMDIVN;
s = val >> 8;
switch (m)
{
case 0: HCLK = FCLK; break;
case 1: HCLK = FCLK >> 1; break;
case 2:
if(s & 2) HCLK = FCLK >> 3;
else HCLK = FCLK >> 2; break;
case 3:
if(s & 1) HCLK = FCLK / 6;
else HCLK = FCLK / 3; break;
}
if(p)
PCLK = HCLK >> 1;
else
PCLK = HCLK;
val = rUPLLCON;
m = (val >> 12) & 0xff;
p = (val >> 4) & 0x3f;
s = val & 3;
UPLL = ((m+8)*FIN)/((p+2)*(1<<s));
UCLK = (rCLKDIVN&8)?(UPLL>>1):UPLL;
}
—————————————————————————————————————
void ChangeClockDivider(int hdivn_val,int pdivn_val) //from 2440lib.c
{
int hdivn=2, pdivn=0;
// hdivn_val (FCLK:HCLK)ratio hdivn
// 11 1:1 (0)
// 12 1:2 (1)
// 13 1:3 (3)
// 14 1:4 (2)
// pdivn_val (HCLK:PCLK)ratio pdivn
// 11 1:1 (0)
// 12 1:2 (1)
switch(hdivn_val) {
case 11: hdivn=0; break;
case 12: hdivn=1; break;
case 13:
case 16: hdivn=3; break;
case 14:
case 18: hdivn=2; break;
}
switch(pdivn_val) {
case 11: pdivn=0; break;
case 12: pdivn=1; break;
}
//Uart_Printf("Clock division change [hdiv:%x, pdiv:%x]\n", hdivn, pdivn);
rCLKDIVN = (hdivn<<1) | pdivn;
switch(hdivn_val) {
case 16: // when 1, HCLK=FCLK/8.
rCAMDIVN = (rCAMDIVN & ~(3<<8)) | (1<<8);
break;
case 18: // when 1, HCLK=FCLK/6.
rCAMDIVN = (rCAMDIVN & ~(3<<8)) | (1<<9);
break;
}
if(hdivn!=0)
MMU_SetAsyncBusMode();
else
MMU_SetFastBusMode();
}
—————————————————————————————————————
void Uart_Init(int pclk,int baud) //from 2440lib.c
{
int i;
if(pclk == 0)
pclk = PCLK;
rUFCON0 = 0x0; //UART channel 0 FIFO control register, FIFO disable
rUFCON1 = 0x0; //UART channel 1 FIFO control register, FIFO disable
rUFCON2 = 0x0; //UART channel 2 FIFO control register, FIFO disable
rUMCON0 = 0x0; //UART chaneel 0 MODEM control register, AFC disable
rUMCON1 = 0x0; //UART chaneel 1 MODEM control register, AFC disable
//UART0
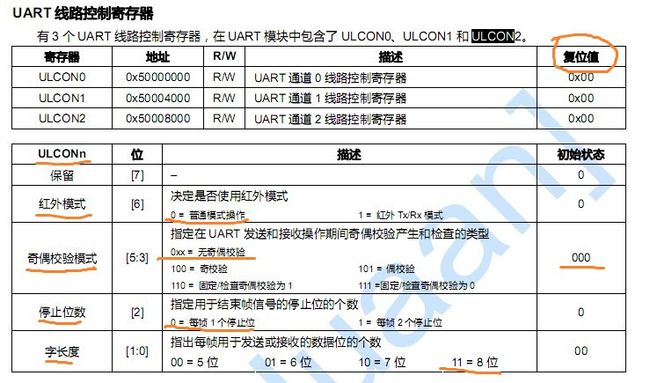
rULCON0 = 0x3; //Line control register : Normal,No parity,1 stop,8 bits
// [10] [9] [8] [7] [6] [5] [4] [3:2] [1:0]
// Clock Sel, Tx Int, Rx Int, Rx Time Out, Rx err, Loop-back, Send break, Transmit Mode, Receive Mode
// 0 1 0 , 0 1 0 0 , 01 01
// PCLK Level Pulse Disable Generate Normal Normal Interrupt or Polling
rUCON0 = 0x245; // Control register
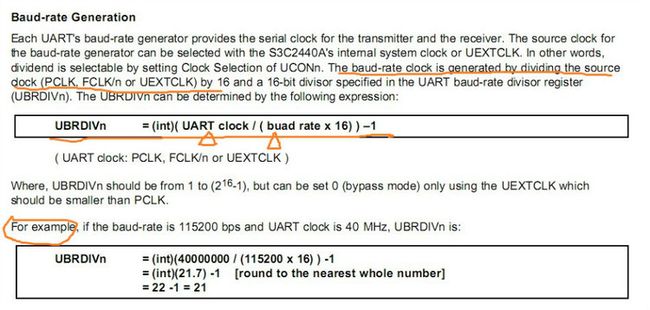
rUBRDIV0=( (int)(pclk/16./baud+0.5) -1 ); //Baud rate divisior register 0
//UART1
rULCON1 = 0x3;
rUCON1 = 0x245;
rUBRDIV1=( (int)(pclk/16./baud+0.5) -1 );
//UART2
rULCON2 = 0x3;
rUCON2 = 0x245;
rUBRDIV2=( (int)(pclk/16./baud+0.5) -1 );
for(i=0;i<100;i++);
}
———————————————————————————————————————
我们先从main函数开始, rMPLLCON =(92<<12)|(1<<4)|1; //设置FCLK为400M
首先设置MPLL提高系统时钟为400MHz,根据下面这个公式求得,令MDIV=92,PDIV=1,SDIV=1。
——————————————————————————————————————
{
whichUart = ch;
}

rGPHCON |=(2<<4)|(2<<6); //把GPH3、GPH2设置为RXD[0] 、TXD[0] 功能