linux input输入子系统分析《二》:s3c2440的ADC简单驱动实例分析
主要讲述本人在学习Linux内核input子系统的全部过程,如有分析不当,多谢指正。以下交流方式,文章欢迎转载,保留联系信息,以便交流。
主页:www.ielife.cn(爱嵌论坛——嵌入式技术学习交流)
博客:blog.csdn.net/ielife
1 mini2440的ADC驱动实例
这节与输入子系统无关,出现在这里是因为后面的章节会讲到触摸屏输入子系统驱动,由于触摸屏也使用ADC,因此本节是为了说明ADC通过驱动代码是如何控制的。
本节重点:
- 如何通过原理图查找ADC硬件使用的资源
- 如何通过芯片手册查找ADC硬件的操作方法
- ADC设备驱动程序的初始化流程
- ADC设备驱动程序的中断处理流程
本节难点:
- ADC的控制寄存器的操作方法
- ADC驱动程序的控制逻辑
1.1 模数转换(ADC)简介
ADC是把模拟信号转化为计算机能够处理的数字信号的过程。
模拟信号一般为电压,或者是电流。有些时候也可以是非电信号,如温度、湿度、声音、位移等,它们通过传感器转换为电压信号传递给A/D转换器才可以进行A/D转换。
1.2 mini2440上的可调电阻
由mini2440的用户手册的1.3.8节A/D输入测试可知,S3C2440的AIN0引脚接到了开发板的可调电阻W1上,原理图如下图3所示:
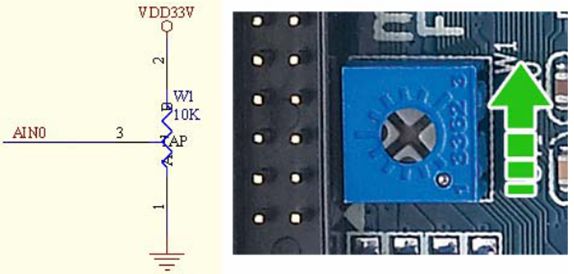
图3 mini2440可调电阻原理图
上图中,1、2电路的状态是能够确定的,一个接3.3V电压,一个接地,中间接可变电阻W1(10K)。而引脚3接AIN0,它是什么?可以通过mini2440开发板原理图来查找:
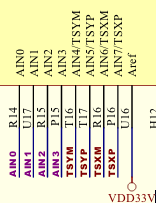
图4 mini2440可调电阻与S3C2440接口电路
通过上图可知,开发板的AIN0引脚与S3C2440 CPU芯片上的AIN0引脚相连接。因此需要进一步查看S3C2440芯片手册获得AIN0引脚的作用。
下图5是S3C2440芯片手册的第16章对A/D转换器和触摸屏接口的介绍。S3C2440内部共有8个通道的模拟输入接口,其转换的模拟信号为10位的二进制数字编码。
A[3:0]分别代表AIN0、AIN1、AIN2、AIN3,触摸屏接口可以控制/选择触摸屏X、Y方向的引脚(XP,XM,YP,YM)的变换。
图5 A/D转换器和触摸屏的功能结构图
那么ADC如何实现模拟信号到数字信号的转换呢,由上图可知,模拟信号通过8个通道的任意一个输入,然后通过分频器决定A/D转换器的频率,最后通过ADC将模拟信号转换为数字信号保存在ADCDAT0中,ADCDAT0中的数据可以通过查询或者中断的方式来获得。
S3C2440模数转换器的控制逻辑可由以下寄存器来进行操作:
ADCCON ADC控制寄存器
ADCTSC ADC触摸屏控制寄存器器
ADCDLY ADC启动初始化延迟寄存器
ADCDAT0 ADC转换数据寄存器
ADCDAT1 ADC转换数据寄存器
ADCUPDN 笔尖抬起或落下中断状态寄存器
由以上内容,开发板可以通过W1可变电阻的阻值变化产生电压的变化,由AIN0引脚传递给ADC控制器转化为数字信号,我们通过驱动来获得可调电阻W1硬件的变化。
1.3 可调电阻的ADC驱动程序
既然需要写驱动,首先先确定可调电阻的ADC驱动属于什么设备。由于是顺序读取寄存器ADCDAT0的过程,所以把它看成一个字符设备,而且对于这个设备来说,更简单的实现方法是通过misc杂项设备来实现。
代码实现的非常简单,通过中断的方式获取ADCDAT0的前10位的值就可以了。代码如下:
/*
* mini2440 ADC驱动程序
*
* Kevin Lee <www.ielife.cn>
*/
#include<linux/kernel.h> /* 提供prink等内核特有属性 */
#include<linux/module.h> /* 提供如MODULE_LICENSE()、EXPORT_SYMBOL() */
#include<linux/init.h> /* 设置段,如_init、_exit,设置初始化优先级,如__initcall */
#include<linux/wait.h> /* 等待队列wait_queue */
#include<linux/interrupt.h> /* 中断方式,如IRQF_SHARED */
#include<linux/fs.h> /* file_operations操作接口等 */
#include<linux/clk.h> /* 时钟控制接口,如struct clk */
#include<linux/miscdevice.h> /* 杂项设备 */
#include<asm/io.h> /* 提供readl、writel */
#include<asm/irq.h> /* 提供中断号,中断类型等,如IRQ_ADC中断号 */
#include<asm/arch/regs-adc.h> /* 提供控制器的寄存器操作,如S3C2410_ADCCON */
#include<asm/uaccess.h> /* 提供copy_to_user等存储接口 */
/* 定义设备名称,用户访问接口/dev/adc */
#defineDEVICE_NAME "adc"
/* 定义adc时钟,通过adc_clock接口获得adc输入时钟,adc转换器需要 */
staticstruct clk *adc_clock;
/* 定义虚拟地址访问硬件寄存器,__iomem只是用于表示指针将指向I/O内存 */
staticvoid __iomem *base_addr;
/* 定义并初始化一个等待队列adc_waitqueue,对ADC资源进行阻塞访问 */
staticwait_queue_head_t adc_waitqueue;
/* 定义并初始化信号量adc_lock,用于控制共享中断IRQ_ADC资源的使用 */
DECLARE_MUTEX(adc_lock);
EXPORT_SYMBOL(adc_lock);
/* 定义等待队列的条件,当is_read_ok=1时,ADC转换完毕,数据可读 */
staticvolatile int is_read_ok = 0;
/* 定义ADC转换的数据内容 */
staticvolatile int adc_data;
staticint adc_open(struct inode *inode, struct file *file);
staticssize_t adc_read(struct file *filp, char *buffer, size_t count, loff_t *ppos);
staticint adc_close(struct inode *inode, struct file *filp);
/* 实现字符设备操作接口 */
staticstruct file_operations adc_fops =
{
.owner = THIS_MODULE,
.open = adc_open,
.read = adc_read,
.release = adc_close,
};
/* 实现misc杂项设备操作接口 */
staticstruct miscdevice adc_miscdev =
{
.minor = MISC_DYNAMIC_MINOR, /* 动态获取杂项设备的次设备号 */
.name = DEVICE_NAME, /* 杂项设备的设备名称,这里为adc */
.fops = &adc_fops, /* 杂项设备子系统接口,指向adc_fops操作接口 */
};
/*ADC中断服务程序,获取ADC转换后的数据 */
staticirqreturn_t adc_irq(int irq, void *dev_id)
{
/* 仅当is_read_ok=0时才进行转换,防止多次中断 */
if(!is_read_ok)
{
/* 读取ADCCON[9:0]的值,0x3ff为只获取[9:0]位,ADCCON为转换后的数据 */
adc_data = readl(base_addr +S3C2410_ADCDAT0) & 0x3ff;
/* 设置标识为1,唤醒读等待进程可以拷贝数据给用户空间了 */
is_read_ok = 1;
wake_up_interruptible(&adc_waitqueue);
}
return IRQ_RETVAL(IRQ_HANDLED);
}
/*ADC设备打开,并注册IRQ_ADC中断处理函数 */
staticint adc_open(struct inode *inode, struct file *file)
{
int ret;
/* 由于IRQ_ADC为共享中断,因此中断类型选择IRQF_SHARED,最后一个参数需要设置NULL以外的值 */
ret = request_irq(IRQ_ADC, adc_irq,IRQF_SHARED, DEVICE_NAME, (void *)1);
if (ret)
{
printk(KERN_ERR "Could notallocate ts IRQ_ADC !\n");
return -EBUSY;
}
return 0;
}
/*设置ADC控制寄存器,开启AD转换*/
staticvoid adc_run(void)
{
volatile unsigned int adccon;
/* ADCCON的位[14]=1为使能A/D预分频器,位[13:6]=32表示设置的分频值,ADC的转换频率需要在2.5MHZ以下
* 我们使用的ADC输入时钟为PCLK=50MHZ,50MHZ/32<2.5MHZ,满足条件
* 位[5:3]=000,表示模拟输入通道选择AIN0
*/
adccon = (1 << 14) | (32 << 6);
writel(adccon, base_addr + S3C2410_ADCCON);
/* 位[0]=1表示使能ADC转换,当转换完毕后此位被ADC控制器自动清0 */
adccon = readl(base_addr + S3C2410_ADCCON)| (1 << 0);
writel(adccon, base_addr + S3C2410_ADCCON);
}
/*ADC设备驱动读函数 */
staticssize_t adc_read(struct file *filp, char *buff, size_t count, loff_t *offp)
{
int err;
/* 获取信号量,如果被占用,睡眠等待持有者调用up唤醒
* 这样做的原因是,有可能其他进程抢占执行或是触摸屏驱动抢占执行
*/
down_interruptible(&adc_lock);
/* 启动adc转换,调用中断处理函数adc_irq*/
adc_run();
/* 如果is_read_ok为假,则睡眠等待条件为真,由中断处理函数唤醒 */
wait_event_interruptible(adc_waitqueue,is_read_ok);
/* 执行到此说明中断处理程序获得了ADC转换后的值,清除为0等待下一次的读 */
is_read_ok = 0;
/* 将转换后的数据adc_data提交给用户 */
err = copy_to_user(buff, (char*)&adc_data, min(sizeof(adc_data),count));
/* 释放信号量,并唤醒因adc_lock而睡眠的进程 */
up(&adc_lock);
return err ? -EFAULT : sizeof(adc_data);
}
/*ADC设备关闭函数 */
staticint adc_close(struct inode *inode, struct file *filp)
{
/*释放中断*/
free_irq(IRQ_ADC, (void *)1);
return 0;
}
staticint __init adc_init(void)
{
int ret;
/* 获得adc的时钟源,通过arch/arm/mach-s3c2410/clock.c获得提供的时钟源为PCLK */
adc_clock = clk_get(NULL, "adc");
if (!adc_clock)
{
printk(KERN_ERR "failed to get adcclock source\n");
return -ENOENT;
}
/* 在时钟控制器中给adc提供输入时钟,ADC转换需要输入时钟 */
clk_enable(adc_clock);
/* 使用ioremap获得操作ADC控制器的虚拟地址
* S3C2410_PA_ADC=ADCCON,是ADC控制器的基地址,寄存器组的长度=0x1c
*/
base_addr = ioremap(S3C2410_PA_ADC, 0x1c);
if (base_addr == NULL)
{
printk(KERN_ERR "Failed to remapregister block\n");
return -ENOMEM;
goto fail1;
}
/* 初始化等待队列 */
init_waitqueue_head(&adc_waitqueue);
/* 注册杂项设备 */
ret = misc_register(&adc_miscdev);
if (ret)
{
printk(KERN_ERR "Failed toregister miscdev\n");
goto fail2;
}
printk(DEVICE_NAME "initialized!\n");
return 0;
fail2:
iounmap(base_addr);
fail1:
clk_disable(adc_clock);
clk_put(adc_clock);
return ret;
}
staticvoid __exit adc_exit(void)
{
/* 释放虚拟地址 */
iounmap(base_addr);
/* 禁止ADC的时钟源 */
if (adc_clock)
{
clk_disable(adc_clock);
clk_put(adc_clock);
adc_clock = NULL;
}
/*注销misc设备*/
misc_deregister(&adc_miscdev);
}
module_init(adc_init);
module_exit(adc_exit);
MODULE_AUTHOR("KevinLee <www.ielife.cn>");
MODULE_DESCRIPTION("Mini2440ADC Misc Device Driver");
MODULE_VERSION("MINI2440ADC 1.0");
MODULE_LICENSE("GPL");
由于驱动程序不同于应用程序main函数,因此读者观看以上程序的顺序应该如下所示:
首先执行的代码是__init adc_init函数,它会被insmod加载进内核,当然也可以在内核初始化的时候加载,加载成功,应用层访问接口“/dev/adc”被创建;
其次,由于应用层会首先打开“/dev/adc”设备,进而操作ADC设备,因此需要查看adc_open函数做了什么。由于打开设备意味着要使用设备,所以在adc_open中注册IRQ_ADC中断资源;
最后,用户会调用read函数读取ADC转换的值,会调用到adc_read。因此,在adc_read函数中需要设置好AIN0引脚的模拟输入,并启动ADC,把读取的任务交给adc_irq函数去完成,最后由adc_read函数把数据提交给应用层。
如果使用insmod的方式加载,需要编写Makefile函数,如下:
MODULENAME:= adc.o
ifneq($(KERNELRELEASE),)
#call from kernel build system
obj-m := $(MODULENAME)
else
#KERNELDIR?= /lib/modules/$(shell uname -r)/build
KERNELDIR?= /work/system/linux-2.6.22.6
PWD := $(shell pwd)
default:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
endif
clean:
rm -rf *.o *~ core .depend .*.cmd *.ko*.mod.c .tmp_versions module* Module* $(APPNAME)
depend.depend dep:
$(CC) $(CFLAGS) -M *.c > .depend
ifeq(.depend,$(wildcard .depend))
include.depend
endif
adc.c与Makefile文件放在同一目录下,执行make就可以了。Makefile中使用的编译器的名称为arm-linux-gcc,根据自己的情况修改即可。
编译成功,在当前目录下得到adc.ko驱动模块,使用命令modinfo adc.ko,获取信息如下:
stu@stu-desktop:adc$modinfo adc.ko
filename: adc.ko
license: GPL
version: MINI2440 ADC 1.0
description: Mini2440 ADC Misc Device Driver
author: Kevin Lee <www.ielife.cn>
srcversion: 901D02B007F9D53D9C54EA3
depends: built-in,built-in,built-in,built-in,built-in
vermagic: 2.6.22.6mod_unload ARMv4
以上信息也是我们在adc.c代码中添加的,还有的是在编译过程中得到的。
把adc.ko文件放到开发板中,执行insmod adc.ko,看到如下信息则说明启动正常:
adc initialized!
并且可以查看/dev目录下,已经有adc设备文件
# ls -l /dev/adc
crw-rw---- 1 0 0 10, 61 Jul 27 23:17 /dev/adc
1.4 可调电阻的测试程序
编写测试程序adc_test.c文件,源代码如下:
#include<stdio.h>
#include<stdlib.h>
#include<fcntl.h>
#include<unistd.h>
#include<sys/types.h>
#include<errno.h>
#defineDEVICE_NAME "/dev/adc"
intmain()
{
int fd,ret,value;
fd = open(DEVICE_NAME, O_RDONLY);
if(fd < 0) {
perror("open ADC : ");
exit(EXIT_FAILURE);
}
ret = read(fd, &value, sizeof(value));
if(ret < 0) {
perror("read ADC:");
close(fd);
exit(EXIT_FAILURE);
}
printf("read from ADC : %d\n",value);
close(fd);
return 0;
}
源代码简单不做说明,编译源代码的命令:
arm-linux-gcc -Wall -O2 adc_test.c -o adc_test
arm-linux-strip adc_test
拷贝adc_test文件到开发板,执行命令./adc_test,显示如下:
#./adc_test
readfrom ADC : 736
调节(旋转)电位器即转动变阻器,再次执行./adc_test,显示如下:
#./adc_test
readfrom ADC : 886
读到的数值随电阻值的变化而变化,由此说明驱动及硬件工作正常。