SCARA机器人与 DELTA机器人
1、SCARA机器人
SCARA(Selective Compliance Assembly Robot Arm,中文译名:选择顺应性装配机器手臂)是一种圆柱坐标型的特殊类型的工业机器人。
1978年,日本山梨大学牧野洋发明SCARA,该机器人具有四个轴和四个运动自由度,(包括X,Y,Z方向的平动自由度和绕Z轴的转动自由度)。该系列的操作手在其动作空间的四个方向具有有限刚度,而在剩下的其余两个方向上具有无限大刚度。
SCARA系统在x,y方向上具有顺从性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作,例如将一个圆头针插入一个圆孔,故SCARA系统首先大量用于装配印刷电路板和电子零部件;SCARA的另一个特点是其串接的两杆结构,类似人的手臂,可以伸进有限空间中作业然后收回,适合于搬动和取放物件,如集成电路板等。
如今SCARA机器人还广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。它的主要职能是搬取零件和装配工作。它的第一个轴和第二个轴具有转动特性,第三和第四个轴可以根据工作的需要的不同,制造成相应多种不同的形态,并且一个具有转动、另一个具有线性移动的特性。由于其具有特定的形状,决定了其工作范围类似于一个扇形区域。
SCARA机器人可以被制造成各种大小,最常见的工作半径在100毫米至1000毫米之间,此类的SCARA机器人的净载重量在1千克至200千克之间。
 The SCARA acronym stands for Selective Compliant Assembly Robot Arm and is one that is hard to remember. It's also sometimes referred to as: Selective Compliant Articulated Robot Arm.
The SCARA acronym stands for Selective Compliant Assembly Robot Arm and is one that is hard to remember. It's also sometimes referred to as: Selective Compliant Articulated Robot Arm.
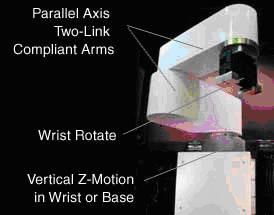
In general, traditional SCARA’s are 4-axis robot arms, i.e., they can move to any X-Y-Z coordinate within their work envelope. There is a fourth axis of motion which is the wrist rotate (Theta-Z). The ‘X’, ‘Y’ and the ‘Theta-Z’ movements are obtained with three parallel-axis rotary joints. The vertical motion is usually an independent linear axis at the wrist or in the base.
By virtue of the SCARA’s parallel-axis joint layout, the arm is slightly compliant in the X-Y direction but rigid in the ‘Z’ direction, hence the term: Selective Compliant. This is advantageous for many types of assembly operations, e.g., inserting a round pin in a round hole without binding.
The second attribute of the SCARA is the jointed two-link arm layout similar to our human arms, hence the often-used term, Articulated. This feature allows the arm to extend into confined areas and then retract or “fold up” out of the way. This is advantageous for transferring parts from one cell to another or for loading/ unloading process stations that are enclosed.
SCARA’s are generally faster and cleaner than comparable Cartesian systems. Their single pedestal mount requires a small footprint and provides an easy, unhindered form of mounting. On the other hand, SCARA's can be more expensive than comparable Cartesian systems and the controlling software requires inverse kinematics for linear interpolated moves. This software typically comes with the SCARA though and is usually transparent to the end-user
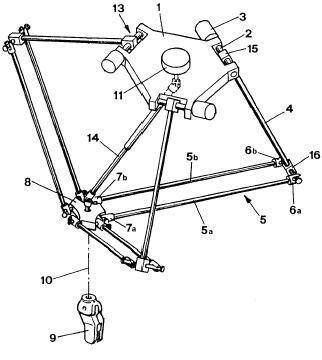
2、DELTA机器人
Delta机器人就像一个倒挂的有三个脚的蜘蛛,因其的灵巧、速度和精确在装配、自动化和医疗设备领域得到应用。但是由于其发明专利控制在少部分人手里,Delta并没有得到应有的推广。最近,Delta机器人机构设计的专利即将到期,使其他制造商有机会生产类似Delta的机器人装置。
SCARA(Selective Compliance Assembly Robot Arm,中文译名:选择顺应性装配机器手臂)是一种圆柱坐标型的特殊类型的工业机器人。
1978年,日本山梨大学牧野洋发明SCARA,该机器人具有四个轴和四个运动自由度,(包括X,Y,Z方向的平动自由度和绕Z轴的转动自由度)。该系列的操作手在其动作空间的四个方向具有有限刚度,而在剩下的其余两个方向上具有无限大刚度。
SCARA系统在x,y方向上具有顺从性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作,例如将一个圆头针插入一个圆孔,故SCARA系统首先大量用于装配印刷电路板和电子零部件;SCARA的另一个特点是其串接的两杆结构,类似人的手臂,可以伸进有限空间中作业然后收回,适合于搬动和取放物件,如集成电路板等。
如今SCARA机器人还广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。它的主要职能是搬取零件和装配工作。它的第一个轴和第二个轴具有转动特性,第三和第四个轴可以根据工作的需要的不同,制造成相应多种不同的形态,并且一个具有转动、另一个具有线性移动的特性。由于其具有特定的形状,决定了其工作范围类似于一个扇形区域。
SCARA机器人可以被制造成各种大小,最常见的工作半径在100毫米至1000毫米之间,此类的SCARA机器人的净载重量在1千克至200千克之间。
In general, traditional SCARA’s are 4-axis robot arms, i.e., they can move to any X-Y-Z coordinate within their work envelope. There is a fourth axis of motion which is the wrist rotate (Theta-Z). The ‘X’, ‘Y’ and the ‘Theta-Z’ movements are obtained with three parallel-axis rotary joints. The vertical motion is usually an independent linear axis at the wrist or in the base.
By virtue of the SCARA’s parallel-axis joint layout, the arm is slightly compliant in the X-Y direction but rigid in the ‘Z’ direction, hence the term: Selective Compliant. This is advantageous for many types of assembly operations, e.g., inserting a round pin in a round hole without binding.
The second attribute of the SCARA is the jointed two-link arm layout similar to our human arms, hence the often-used term, Articulated. This feature allows the arm to extend into confined areas and then retract or “fold up” out of the way. This is advantageous for transferring parts from one cell to another or for loading/ unloading process stations that are enclosed.
SCARA’s are generally faster and cleaner than comparable Cartesian systems. Their single pedestal mount requires a small footprint and provides an easy, unhindered form of mounting. On the other hand, SCARA's can be more expensive than comparable Cartesian systems and the controlling software requires inverse kinematics for linear interpolated moves. This software typically comes with the SCARA though and is usually transparent to the end-user
2、DELTA机器人
Delta机器人就像一个倒挂的有三个脚的蜘蛛,因其的灵巧、速度和精确在装配、自动化和医疗设备领域得到应用。但是由于其发明专利控制在少部分人手里,Delta并没有得到应有的推广。最近,Delta机器人机构设计的专利即将到期,使其他制造商有机会生产类似Delta的机器人装置。