Linux Device和Driver注册过程,以及Probe的时机
田海立@CSDN
2011/08/26
Linux 2.6的设备驱动模型中,所有的device都是通过Bus相连。device_register() / driver_register()执行时通过枚举BUS上的Driver/Device来实现绑定,本文详解这一过程。这是整个LINUX设备驱动的基础,PLATFORM设备,I2C上的设备等诸设备的注册最终也是调用本文讲述的注册函数来实现的。
Linux Device的注册最终都是通过device_register()实现,Driver的注册最终都是通过driver_register()实现。下图对照说明了Device和Driver的注册过程。
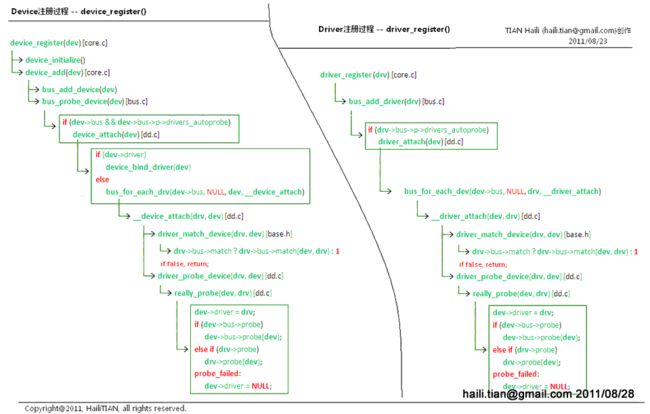
上面的图解一目了然,详细过程不再赘述。注意以下几点说明:
- BUS的p->drivers_autoprobe;1默认是true。
- bus_for_each_drv()是对BUS上所有的Driver都进行__device_attach()操作;同样的,bus_for_each_dev()是对BUS上所有的Device都进行__driver_attach()操作。
- BUS上实现的.match()函数,定义了Device和Driver绑定时的规则。比如Platform实现的就是先比较id_table,然后比较name的规则。如果BUS的match()函数没实现,认为BUS上的所有的Device和Driver都是match的,具体后续过程要看probe()的实现了。
- Probe的规则是:如果BUS上实现了probe就用BUS的probe;否则才会用driver的probe。
Device一般是先于Driver注册,但也不全是这样的顺序。Linux的Device和Driver的注册过程分别枚举挂在该BUS上所有的Driver和Device实现了这种时序无关性。
于是打开SourceInsight追踪了一下:
从driver_register看起:
int
driver_register(
struct
device_driver
*
drv) { klist_init(
&
drv
->
klist_devices, klist_devices_get, klist_devices_put); init_completion(
&
drv
->
unloaded);
return
bus_add_driver(drv); }
klist_init与init_completion没去管它,可能是2.6的这个设备模型要做的一些工作。直觉告诉我要去bus_add_driver。
bus_add_driver中:
都是些Kobject 与 klist 、attr等。还是与设备模型有关的。但是其中有一句:
driver_attach(drv);
单听名字就很像:
void
driver_attach(
struct
device_driver
*
drv) { bus_for_each_dev(drv
->
bus, NULL, drv, __driver_attach); }
在__driver_attach中又主要是这样:
driver_probe_device(drv, dev);
跑到driver_probe_device中去看看:
有一段很重要:
if (drv->bus->match && !drv->bus->match(dev, drv))
goto Done;
明显,是调用的驱动的总线上的match函数。如果返回1,则可以继续,否则就Done了。
继承执行的话:
if (drv->probe) {
ret = drv->probe(dev);
if (ret) {
dev->driver = NULL;
goto ProbeFailed;
}
只要probe存在则调用之。至此就完成了probe的调用。
这个过程链的关键还是在drv->bus->match ,因为其余的地方出错的话就是注册失败,而只要注册不失败且match返回1,那么就铁定会调用驱程的probe了。你可以注册一个总线类型和总线,并在match中总是返回 1, 会发现,只要struct device_driver中的bus类型正确时,probe函数总是被调用.
PCI设备有自己的总线模型,估计在它的match中就有一个判断的条件。
static
int
pci_bus_match(
struct
device
*
dev,
struct
device_driver
*
drv) {
struct
pci_dev
*
pci_dev
=
to_pci_dev(dev);
struct
pci_driver
*
pci_drv
=
to_pci_driver(drv);
const
struct
pci_device_id
*
found_id; found_id
=
pci_match_device(pci_drv, pci_dev);
if
(found_id)
return
1
;
return
0
; }
-------------------------------另解-----------------------------------------------------------------------------------------------
从driver_register看起,此处我的这里是:
int driver_register( struct device_driver * drv) { if ((drv -> bus -> probe && drv -> probe) || (drv -> bus -> remove && drv -> remove) || (drv -> bus -> shutdown && drv -> shutdown)) { printk(KERN_WARNING " Driver '%s' needs updating - please use bus_type methods\n " , drv -> name); } klist_init( & drv -> klist_devices, NULL, NULL); return bus_add_driver(drv); }
klist_init不相关,不用管他,具体再去看bus_add_driver:
int bus_add_driver( struct device_driver * drv) { // 1.先kobject_set_name(&drv->kobj, "%s", drv->name); // 2.再kobject_register(&drv->kobj) // 3.然后调用了:driver_attach(drv) }
int driver_attach( struct device_driver * drv) { return bus_for_each_dev(drv -> bus, NULL, drv, __driver_attach); }
真正起作用的是__driver_attach:
static int __driver_attach( struct device * dev, void * data) { ... if ( ! dev -> driver) driver_probe_device(drv, dev); ... } int driver_probe_device( struct device_driver * drv, struct device * dev) { ... // 1.先是判断bus是否match: if (drv -> bus -> match && ! drv -> bus -> match(dev, drv)) goto done; // 2.再具体执行probe: ret = really_probe(dev, drv); ... }
really_probe才是我们要找的函数:
static int really_probe( struct device * dev, struct device_driver * drv) { ... // 1.先是调用的驱动所属总线的probe函数: if (dev -> bus -> probe) { ret = dev -> bus -> probe(dev); if (ret) goto probe_failed; } else if (drv -> probe) { // 2.再调用你的驱动中的probe函数: ret = drv -> probe(dev); if (ret) goto probe_failed; } ... }
其中,drv->probe(dev),才是真正调用你的驱动实现的具体的probe函数。
也就是对应此文标题所问的,probe函数此时被调用。
声明:以下主要内容参考自:
关于struct device_driver结构中的probe探测函数的调用
http://blog.chinaunix.net/u2/71164/showart.php?id=1361188