影像信息提取之——DEM提取
DEM除了包括地面高程信息外,还可以派生地貌特性,包括坡度、坡向等,还可以计算地形特征参数,包括山峰、山脊、平原、位面、河道和沟谷等。在测绘中用于制作正射影像图以及地图的修测。在遥感应用中可作为分类的辅助数据。它还是地理信息系统的基础数据,作为三维GIS的基础地形数据。在军事上可用于导航及导弹制导、作战电子沙盘等。
本文主要包括:
- 几个概念
- 表示模型
- DEM获取途径
- 立体像对DEM提取
数字高程模型(Digital Elevation Model),简称DEM,它是用一组有序数值阵列形式表示地面高程的一种实体地面模型。
1. 几个概念
l 数字地形模型(DTM, Digital Terrain Model)
DTM利用一个任意坐标系中大量选择的已知x、y、z的坐标点对连续地面的一个简单的统计表示,或者说,DTM就是地形表面形态属性信息的数字表达,是带有空间位置特征和地形属性特征的数字描述。地形表面形态的属性信息一般包括高程、坡度、坡向等。最初是为了高速公路的自动设计提出来的(Miller,1956)。此后,它被用于各种线路选线(铁路、公路、输电线)的设计以及各种工程的面积、体积、坡度计算,任意两点间的通视判断及任意断面图绘制。
l 数字高程模型(DEM, Digital Elevation Model)
DEM是高程Z关于平面坐标X,Y两个自变量的连续函数,DEM只是它的一个有限的离散表示。高程模型最常见的表达是相对于海平面的海拔高度,或某个参考平面的相对高度。
l 数字表面模型(DSM,Digital Surface Model)
DSM是指包含了地表建筑物、桥梁和树木等高度的地面高程模型。和DEM相比,DEM只包含了地形的高程信息,并未包含其它地表信息,DSM是在DEM的基础上,进一步涵盖了除地面以外的其它地表信息的高程。在一些对建筑物高度有需求的领域,得到了很大程度的重视。
我们可以看出三个定义相互有交集又有区别。DTM定义的范围最大,是一种广义的定义,用数字方式描述地形的统称。DEM是用高程来描述地形的DTM。DSM可以看成是DEM的衍生,用的较多的是城市DSM和森林DSM。
实际上,在空间信息领域使用最多的是DEM。
2. 表示模型
三个模型都是用数字的方式表达,主要有以下表示模型:
l 规则格网模型
规则网格,通常是正方形,也可以是矩形、三角形等规则网格。规则网格将区域空间切分为规则的格网单元,每个格网单元对应一个数值,这个数值就是高程。数学上可以表示为一个矩阵,在计算机实现中则是一个二维数组。
规则格网的高程矩阵,可以很容易地用计算机进行处理,特别是栅格数据结构的地理信息系统。它还可以很容易地计算等高线、坡度坡向、山坡阴影和自动提取流域地形,使得它成为DEM最广泛使用的格式,目前许多国家提供的DEM数据都是以规则格网的数据矩阵形式提供的。
这里我们可以看到,最常见的规则格网的存在形式就是图像。
l 等高线模型
等高线模型表示高程,高程值的集合是已知的,每一条等高线对应一个已知的高程值,这样一系列等高线集合和它们的高程值一起就构成了一种地面高程模型。
最常见的等高线模型的存在形式是矢量数据,高程值存放在矢量属性表中。
l 不规则三角网(TIN)模型
尽管规则格网DEM在计算和应用方面有许多优点,但也存在许多难以克服的缺陷:1)在地形平坦的地方,存在大量的数据冗余; 2)在不改变格网大小的情况下,难以表达复杂地形的突变现象;3)在某些计算,如通视问题,过分强调网格的轴方向。
不规则三角网(Triangulated Irregular Network, TIN)是另外一种表示数字高程模型的方法[Peuker等,1978],它既减少规则格网方法带来的数据冗余,同时在计算(如坡度)效率方面又优于纯粹基于等高线的方法。
TIN模型根据区域有限个点集将区域划分为相连的三角面网络,区域中任意点落在三角面的顶点、边上或三角形内。如果点不在顶点上,该点的高程值通常通过线性插值的方法得到(在边上用边的两个顶点的高程,在三角形内则用三个顶点的高程)。所以TIN是一个三维空间的分段线性模型,在整个区域内连续但不可微。
TIN的数据存储方式比格网DEM复杂,常见的有ArcGIS中TIN数据模型。
这三种表达模型中,使用最多也最简单的就是栅格图像(格网)。等高线模型往往在地形图或者线画图中表现。TIN由于数据存储较复杂,用的较少。值的注意的是,这三种模型很容易互相转换。
3. DEM获取途径
建立DEM的方法有多种,从数据源及采集方式主要有:根据航空或航天影像,通过摄影测量途径获;野外测量或者从现有地形图上采集高程点或者等高线,后通过内插生成DEM等方法。如下表所示:
| 方法 |
优点 |
缺点 |
| 航空摄影测量 |
成熟的方法,精度高,可获取大比例尺DEM |
成本高,周期长,且受航空管制 |
| 高程点或者等高线差值 |
成本低,操作简单 |
受数据源限制大,很多地区无高程点或等高线数据。 |
| 卫星遥感 |
可以大范围获取DEM。 |
受天气影响较大,目前可获取的比例尺较小。 |
| 干涉雷达技术 |
可以大范围获取DEM,不受天气影响。 |
目前获取大比例尺DEM较困难,随着德国高分辨率雷达卫星TanDEM-X的上天会有所突破。 |
| 激光雷达技术 |
精度高,可获取大比例尺DEM |
起步阶段,技术门槛高 |
要想快速的获取大范围的DEM数据,卫星手段是一种好的方法。而且随着卫星传感器的发展,获取的DEM精度越来越高。如目前商业卫星最高分辨率的0.41米GeoEye-1,在使用高质量控制资料时,垂直精度的中误差可达到0.5米,可满足1:5000的地图比例尺生产。
目前具有单轨立体成像的卫星传感器主要有:
| 传感器 |
国家 |
分辨率(米) |
重复周期(天) |
| Worldview |
美国 |
0.5 |
1~4 |
| GeoEye-1 |
美国 |
0.41/0.5 |
2~3 |
| CartoSAT -1(P5) |
印度 |
2.5 |
/ |
| ALOS |
日本 |
2.5 |
2 |
| RapidEye |
意大利 |
5 |
每天 |
| EROS-B |
以色列 |
0.7 |
5 |
| 天绘 |
中国 |
2 |
/ |
| 资源三号 |
中国 |
2.1 |
3~5 |
当然还有一些侧轨立体成像的卫星,包括IKONOS, KOMPSAT-2, OrbView-3, QuickBird, SPOT 5等。
4. 立体像对DEM提取
下面介绍使用ENVI的DEM Extraction扩展模块,以CartoSAT -1(P5)数据为例,在ENVI5下介绍基于立体像对的方式提取DEM。
图1为基于立体像对的DEM提取流程图,总体上分为六步。

图1 DEM提取流程
第一步:输入立体像对
(1) 单击File->Open,打开BANDA.TIF和BANDF.TIF级数据。
(2) 选择Toolbox/ Terrain/DEM Extraction/DEM Extraction Wizard: New,单击Select Stereo Image按钮,选择BANDA.TIF左影像(left image ), BANDF.TIF为右影像(right image),ENVI自动识别RPC文件,否则需要手动选择RPC文件(BANDA_RPC_ORG_bj.TXT和BANDF_RPC_ORG_bj.TXT)。
(3) 单击Next按钮。
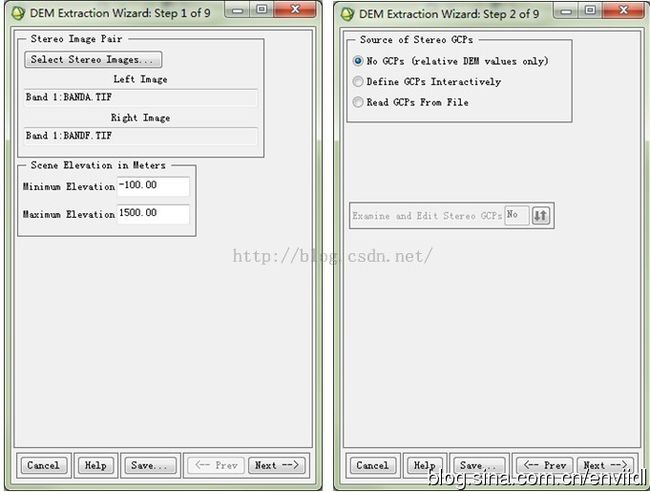
图2 选择左右影像以及控制点方式
第二步:定义地面控制点
提供三种定义地面控制点方式:不定义、交互式定义和读取控制点文件。这里选择不定义控制点,单击Next按钮。
注:不定义地面控制点得到的DEM是相对高程,即以卫星地势面为基准。
第三步:定义连接点
(1) 提供三种定义连接点方式:自动寻找、交互式手工定义和外部读取控制点文件。选择选择自动寻找,参数设置如下所示,
l 连接点数目(Number of Tie Points):60。
l 搜索窗口大小(Search Windows Size):481。
l 移动窗口大小(Moving Window Size):41。
l 平均高程(Region Elevation):自动从影像读取。
l 是否检查连接点(Examine and Edit Tie Points):Yes
(2) 单击Next按钮,进入查看/添加/编辑连接点步骤
(3) 单击Show Table,选择Sort Table By Error,误差大的点排在前面,逐个选择Tie点查看精度,将偏离较大的点进行微调或者直接删除。
(4) 自动寻找的Tie点分布有间隙,手动增加一些点,充分利用Predict Left(或Right)预测功能可以提高效率。
(5) 当误差达到一定范围(Maximum Y Parallax<10),单击Next按钮。
注:1、搜索窗口和移动窗口值设置的都比较大,原因用RPC文件定位的BANDA和BANDF,发现两个图像的地理位置偏差比较大,故这里设置的值都比较大,搜索窗口大小可以参照立体像对两个图像。
2、可先单击Delete ALL删除所有点,再单击Restore加载Tie.pts文件。
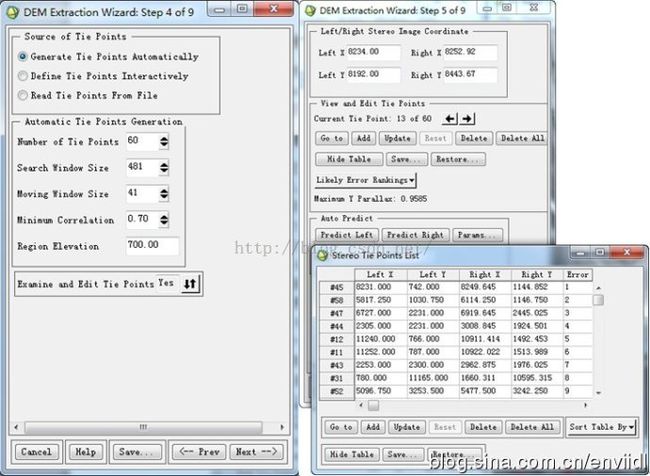
图3 Tie点的选择与调整
第四步:设定DEM提取参数
(1) ENVI会生成核线图像,可以用于立体观测,选择一个路径分别输出,单击Next。
(2) 设置DEM输出投影参数。这里直接设置为UTM坐标,输出像元大小为5m(记得回车自动计算输出像元行列数,否则结果会带很多黑背景),单击Next。
(3) 设置DEM输出参数,根据需求设置背景值,地形精细程度等参数。

图4输出核共线图像
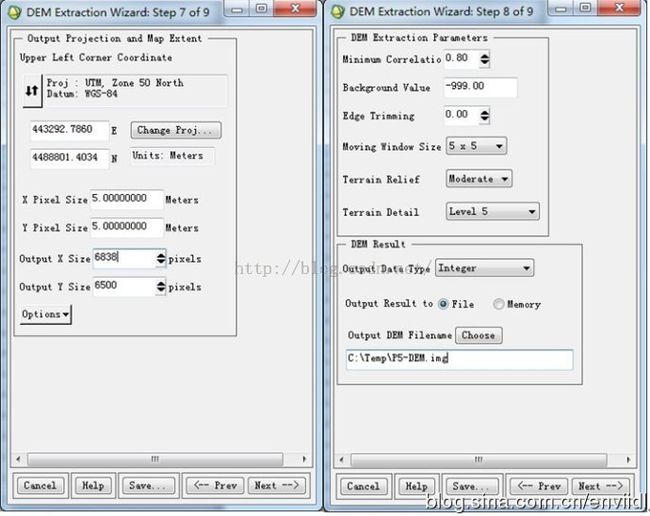
图5 DEM输出投影与输出参数设置
第五步:输出DEM并检查结果
将得到的DEM在3D SurfaceView下查看。
第六步:编辑DEM
生成的DEM有些地方如厚云等,对获得的地形有影响,需要手动更改这些区域的高程数据。
最好将整个流程保存为工程文件,以备下次使用。
图6 DEM的编辑