Robolectric介绍
简介
在Android模拟器或设备运行测试很慢!构建,部署和启动应用程序往往需要一分钟或更长时间。
在Android直接从您的IDE内部运行测试岂不是很好?但容易碰到java.lang.RuntimeException: Stub!
Robolectric不依赖Android SDK jar的安卓单元测试框架,测试在JVM上运行,可以在几秒内完成。
示例:
@RunWith(RobolectricTestRunner.class)
public class MyActivityTest {
@Test
public void clickingButton_shouldChangeResultsViewText() throws Exception {
MyActivity activity = Robolectric.setupActivity(MyActivity.class);
Button button = (Button) activity.findViewById(R.id.button);
TextView results = (TextView) activity.findViewById(R.id.results);
button.performClick();
assertThat(results.getText().toString()).isEqualTo("Robolectric Rocks!");
}
}
Robolectric改写Android SDK中的类,使他们可能在普通的JVM上运行。
Robolectric视图和资源及本地C代码实现等东东加载,很容易地提供我们自己的特定的SDK方法实现,比如模拟错误情况或现实世界的sensor行为。
运行测试模拟器之外
Robolectric,您可以在工作站上运行测试,或在常规JVM持续集成环境,没有一个模拟器。正因为如此,德兴,包装和安装 - 上的仿真器的步骤是没有必要的,减少分钟的测试周期秒钟,这样可以快速迭代,并有信心重构代码。
Robolectric的风格更接近黑盒测试,通常不需要Mockito等模拟框架,当然依旧可以与Mockito配合使用。
快速入门
Robolectric与Gradle或Maven配合比较好。新项目推荐使用Gradle。
build.gradle
testCompile“org.robolectric:robolectric:3.0”
测试使用注解即可:
@RunWith(RobolectricGradleTestRunner.class)
@Config(constants = BuildConfig.class)
public class SandwichTest {
}
注意必须指定constants指向由生成系统生成的BuildConfig.class。Robolectric使用类的常量来计算输出路径(Gradle使用), 否则Robolectric将无法找到manifest,resources或asset。
使用Maven构建
pom.xml:
<dependency> <groupId>org.robolectric</groupId> <artifactId>robolectric</artifactId> <version>3.0</version> <scope>test</scope> </dependency>
测试使用注解即可:
@RunWith(RobolectricTestRunner.class)
public class SandwichTest {
}
如果你引用项目以外的资源(即在AAR依赖)项目以外的资源,需要提供Robolectric一个指针指向AAR在构建系统。
Android Studio
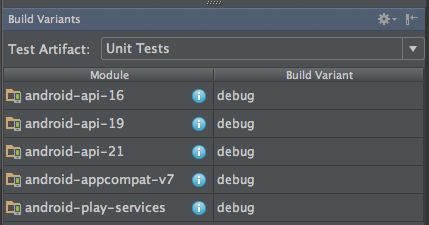
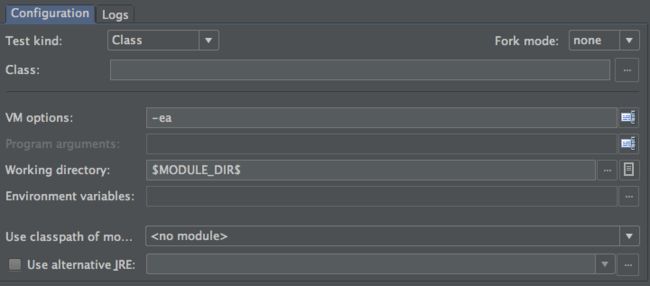
Robolectric适用于Android Studio 1.1.0及以后版本。在"Build Variants" 中开启 unit test支持即可。Linux和Mac中需要编辑“run configurations”,设置工作目录为$MODULE_DIR$。
Eclipse已经不推荐使用,但是可以安装m2e-android(不支持AAR)插件,导入Maven 工程, 点击 "Plugin execution not covered by lifecycle configuration"。
示例工程参见:https://github.com/robolectric/robolectric-samples。
第一个测试
activity的layout如下:
<?xml version="1.0" encoding="utf-8"?> <LinearLayout xmlns:android="http://schemas.android.com/apk/res/android" android:layout_width="match_parent" android:layout_height="match_parent"> <Button android:id="@+id/login" android:text="Login" android:layout_width="wrap_content" android:layout_height="wrap_content"/> </LinearLayout>
我们要编写测试断言当用户点击按钮时应用程序启动LoginActivity。
public class WelcomeActivity extends Activity {
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.welcome_activity);
final View button = findViewById(R.id.login);
button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View view) {
startActivity(new Intent(WelcomeActivity.this, LoginActivity.class));
}
});
}
}
检查启动了对应的intent即可:
@RunWith(RobolectricTestRunner.class)
public class WelcomeActivityTest {
@Test
public void clickingLogin_shouldStartLoginActivity() {
WelcomeActivity activity = Robolectric.setupActivity(WelcomeActivity.class);
activity.findViewById(R.id.login).performClick();
Intent expectedIntent = new Intent(activity, WelcomeActivity.class);
assertThat(shadowOf(activity).getNextStartedActivity()).isEqualTo(expectedIntent);
}
}
注意:目前Robolectric只有API 16/19/21的实例。貌似还不支持API 23等。上述代码不能实际执行,实际执行的参见demo。
后期有空会把上面代码串成实例。
配置Robolectric
配置注解
定制Robolectric的主要方式是通过@Config注解。注释可以应用到的类和方法,同事也可以在基类中定制。
配置SDK级别
Robolectric基于manifest的targetSdkVersion运行代码,可更改设置SDK版本:
@Config(sdk = Build.VERSION_CODES.JELLY_BEAN)
public class SandwichTest {
@Config(sdk = Build.VERSION_CODES.KITKAT)
public void getSandwich_shouldReturnHamSandwich() {
}
}
配置应用程序类
@Config(application = CustomApplication.class)
public class SandwichTest {
@Config(application = CustomApplicationOverride.class)
public void getSandwich_shouldReturnHamSandwich() {
}
}
配置资源路径
Gradle和Maven有默认值,也可自定义:
@Config(manifest = "some/build/path/AndroidManifest.xml")
public class SandwichTest {
@Config(manifest = "other/build/path/AndroidManifest.xml")
public void getSandwich_shouldReturnHamSandwich() {
}
}
默认资源目录res和assets。通过添加resourceDir和assetDir选项到@Config可改变这些值。
配置属性
@Config注解的内容可以在文件中定义robolectric.properties:
sdk=18 manifest=some/build/path/AndroidManifest.xml shadows=my.package.ShadowFoo,my.package.ShadowBar
系统属性
robolectric.offline - Set to true to disable runtime fetching of jars.
robolectric.dependency.dir - When in offline mode, specifies a folder containing runtime dependencies.
robolectric.dependency.repo.id - Set the ID of the Maven repository to use for the runtime dependencies (default sonatype).
robolectric.dependency.repo.url - Set the URL of the Maven repository to use for the runtime dependencies (default https://oss.sonatype.org/content/groups/public/).
robolectric.logging.enabled - Set to true to enable debug loggin
Gradle可在all部分为单元测试配置系统属性。例如,覆盖Maven仓库URL和ID:
android {
testOptions {
unitTests.all {
systemProperty 'robolectric.dependency.repo.url', 'https://local-mirror/repo'
systemProperty 'robolectric.dependency.repo.id', 'local'
}
}
}
参考资料:
http://tools.android.com/tech-docs/unit-testing-support。
Activity的生命周期
Robolectric2.2之前,大多数的测试直接调用构造函数 (new MyActivity()),然后手动调用的生命周期方法,如OnCreate()。ShadowActivity的方法(例如ShadowActivity.callOnCreate())也经常使用,他们是的ActivityController的前身。ActivityController在Robolectric2.0中引入的。
现在不会直接创建ActivityController,而是使用Robolectric.buildActivity()开始。通常可以这样:
Activity activity = Robolectric.buildActivity(MyAwesomeActivity.class).create().get();
上面创建MyAwesomeActivity实例并调用onCreate()。
要检查onResume()也简单:
ActivityController controller = Robolectric.buildActivity(MyAwesomeActivity.class).create().start(); Activity activity = controller.get(); // assert that something hasn't happened activityController.resume(); // assert it happened!
类似的方法也包括start(), pause(), stop(), and destroy(),比如测试整个创建生命周期:
Activity activity = Robolectric.buildActivity(MyAwesomeActivity.class).create().start().resume().visible().get();
可以带intent启动Activity:
Intent intent = new Intent(Intent.ACTION_VIEW); Activity activity = Robolectric.buildActivity(MyAwesomeActivity.class).withIntent(intent).create().get();
或恢复已保存实例的状态:
Bundle savedInstanceState = new Bundle(); Activity activity = Robolectric.buildActivity(MyAwesomeActivity.class) .create() .restoreInstanceState(savedInstanceState) .get();
更多资料参见http://robolectric.org/javadoc/latest/org/robolectric/util/ActivityController.html。
附加模块
为了减少对应用外部依赖,Robolectric的shadow被分成各种附加包。主Robolectric模块只提供基础的Android SDK提供的shadow。
| SDK Package | Robolectric Add-On Package |
|---|---|
| com.android.support.support-v4 | org.robolectric:shadows-support-v4 |
| com.android.support.multidex | org.robolectric:shadows-multidex |
| com.google.android.gms:play-services | org.robolectric:shadows-play-services |
| com.google.android.maps:maps | org.robolectric:shadows-maps |
| org.apache.httpcomponents:httpclient | org.robolectric:shadows-httpclient |