OpenCV实践之路——opencv玩数独之一九宫格轮廓提取与透视变换
本文部分参考自如下链接:Sudoku-recognizer。前几天发现了这个网页,觉得挺好玩的,就想自己实现一下。本以为只是把代码从Python转换到C++是一件很简单的事情,经过这几天的努力发现是自己想的太简单了。到现在也没有完全实现。前面的一小半可以说是参考了上述文章,所做的只是把opencv的代码转换下语言风格,但是到了后面随着Python语言用的越来越多,很多地方已经完全看不懂了,只能自己实现。而且随着深入,自己的想法也越来越多。所以现在几乎已经跳出上文的框架,开始自己去查资料查文档按照自己的思路实现了。但是考虑到完全实现耗时过长而且不确定什么时候能调试完成,加之如果等一切搞定再来记录将会是一篇十分冗长的博文,于是就这样一边实现一边记录吧。先从最基础的开始。
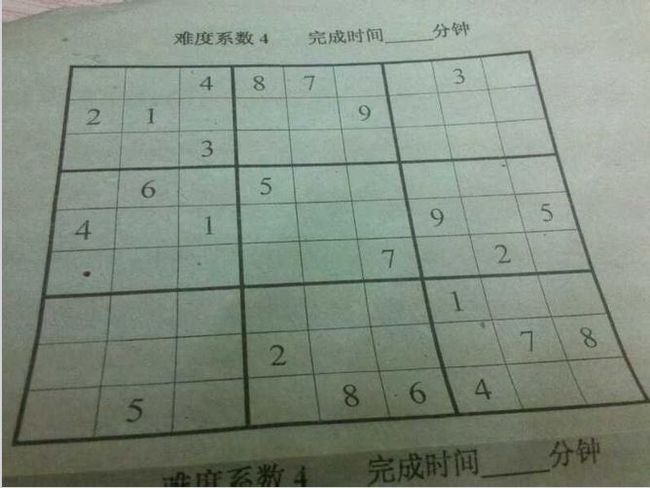
还是先说要实现什么样的效果吧。给一张带有九宫格数独的照片,检测出其中的九宫格,然后取出来做透视变换。看图的画会更加一目了然。
主要思路:
一、高斯滤波去掉部分噪音,拉普拉斯锐化增强轮廓以便于检测提取;自适应阈值化得到二值图像;
二、轮廓检测,多边形逼近,多边形筛选;
三、根据筛选出的四边形的四个顶点进行透视变换(顶点顺序很重要);
这里面需要注意的细节有以下几点:
一、自适应阈值化的时候最后两个参数的调整特别重要,这两个参数决定着能不能快速检测到需要的轮廓。如果找不到,就继续调整这俩值。
二、findContours()查找轮廓时,方法选取CV_CHAIN_APPROX_SIMPLE,这种方法只是存储轮廓的顶点,后面透视变换时用到的顶点就是从这里面提出来的。
三、轮廓筛选的时候可以用上述顶点数来选出四边形,然后根据面积筛选出目标四边形。
四、透视变换的时候顶点的对应顺序要正确,最好按照左上,右上,左下,右下的顺序。变换前后都是这个顺序。
五、获取透视变换矩阵的时候用到的点的格式应为Point2f,变换矩阵是一个3*3的矩阵,我得到的变换矩阵如下:

这一部分主要代码如下:
#include<opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("shudu.jpg");
GaussianBlur(src, src, Size(3, 3), 0, 0);
//拉普拉斯锐化
Mat kernel(3, 3, CV_32F, Scalar(-1));
kernel.at<float>(1, 1) = 8.9;
filter2D(src, src, src.depth(), kernel);
Mat gray, thresh;
cvtColor(src, gray, CV_BGR2GRAY);
//namedWindow("thresh",0);
//轮廓提取
adaptiveThreshold(gray, thresh, 255, ADAPTIVE_THRESH_GAUSSIAN_C, THRESH_BINARY_INV,77,15);
Mat element = getStructuringElement(MORPH_RECT, Size(3, 3));
erode(thresh, thresh, element);
dilate(thresh, thresh, element);
vector<vector<Point> > contours0;
vector<Vec4i> hierarchy;
findContours(thresh, contours0, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point());
//多边形逼近
vector<vector<Point> > contours;
contours.resize(contours0.size());
for (int i = 0; i < contours0.size(); i++)
{
approxPolyDP(contours0[i], contours[i], 55, true);//15是为了得到一个矩形,小于15的数回得到更多的点
}
//选出最大面积的多边形
double area = 0;
int index=0;
for (int i = 0; i < contours.size(); i++)
{
if (contourArea(contours[i])>area)
{
area = contourArea(contours[i]);
index = i;
}
}
//最外围轮廓的显示
if (contourArea(contours[index])>50000)
{
Scalar color(0, 0, 255);
drawContours(src, contours, index, color, 4, 8);
}
//cout << "contours[index]: " << endl << contours[index] << endl;
//最外围轮廓顶点的显示
//for (int i = 0; i < contours[index].size(); i++)
//{
// circle(src, contours[index][i], 15, (0,0,255), 2, 8, 0);
//}
//透视变换,顶点的顺序很重要!
vector<Point2f> corner;//上面提取轮廓的顶点
corner.push_back(Point(83, 80));
corner.push_back(Point(652, 61));
corner.push_back(Point(13, 548));
corner.push_back(Point(798, 495));
vector<Point2f> PerspectiveTransform;//透视变换后的顶点
RotatedRect box = minAreaRect(cv::Mat(contours[index]));
PerspectiveTransform.push_back(Point(0, 0));
PerspectiveTransform.push_back(Point(box.boundingRect().width - 1, 0));
PerspectiveTransform.push_back(Point(0, box.boundingRect().height - 1));
PerspectiveTransform.push_back(Point(box.boundingRect().width - 1, box.boundingRect().height - 1));
//cout << "corner: " << endl << corner << endl;
//获取变换矩阵
Mat M = getPerspectiveTransform(corner, PerspectiveTransform);//Order of points matters!
//cout << "PerspectiveTransform: " << endl << PerspectiveTransform << endl;
Mat out;//提取出的数独方框
cv::Size size(box.boundingRect().width, box.boundingRect().height);
warpPerspective(src, out, M,size, 1, 0, 0);
<span style="white-space:pre"> </span>imshow("src",src);
<span style="white-space:pre"> </span>imshow("out",out);
while (uchar(waitKey()) == 'q') { }
return 0;
}
未完待续......