《Pedestrain detection in Infrared Images》
1.简介
交通安全目前是一项活跃发展的技术,特别是行人识别技术对于降低交通事故的意义重大。行人交通意外是目前第二大的交通事故。年统计200,000多行人被伤害,大约9,000死于交通事故在EU。
使用视频摄像和专业的图像处理技术来对行人进行识别和分类,为交通安全提供了一项较优的技术。
近几年的研究主要针对可视摄像机,已经提出和应用了很多方法,例如基于图形的方法、基于纹理的方法、立体成像和行为分析。所有的这些方法都要应对不同的行人呈现的不同的特征,例如衣着或其它的特征。
最近,红外摄像机的优势被开发出来并加以利用了。通过应用红外图像或红外摄像机对行人进行识别,可以看出红外图像促进了目标识别技术的发展。
本文我们提出应用红外摄像机进行行人识别的方法,基于(i)确定目标位置及具体尺寸和宽高比;(ii)利用一个附加的滤波器的降低错误率;(iii)最后的确认过程,基于人形状的特征对屏幕中的一系列行人进行识别。本文提出的方法只利用一个图像并且没有跟踪,实验结果表明该方法的鲁棒性和稳健性。
下文主要是利用红外摄像机;第三部分提供了问题分析和设计选择;第四部分描述了方法和规则;最后第五部分讨论了结果,并对论文给出了结论。
2.IR领域的特征
红外的图像与可见光图像表达的信息完全不同。可见光图像是根据光照射到物体表面,物体反射所呈现的图像;而红外图像的目标与它的温度和它表面的热度相关。
通常,人的表面的温度比周围环境高,则他辐射的热度也比背景高。因此,红外图像中行人在灰度等级中属于高等级的,并且与周围的环境有强烈的对比,因此利用红外图像特别适用他们的定位。其它的目标也会辐射热量,例如电动车、卡车、公共汽车、摩托车,他们都有一个相似的行为,通过与行人的形状和宽高比进行比较,可以排除这些非行人目标。
红外摄像机一个最主要的是他们独立的光源情况:他们在白天和晚上几乎没有差别,这点优于其他只能在白天工作的摄像机。然而,颜色和纹理也不能够应用了。影子的问题也解决了。事实上,即使行人影子在红外图像中仍然存在,由于不同的温度的原因,影子也被隐藏了。尽管如此,红外图像行人识别仍然有很长的路要走。气候环境例如大雾或雨,会对身体的温度有影响,这也限制了红外系统的有效性。
然而,高温状态和强光减少了行人和其它的不同,事实上,目标都有一个被动热辐射特征,例如信号灯、电池、树、建筑物、和路标,可能都被太阳光照热,导致呈像更复杂,甚至产生热辐射。在这种强温情况下,人穿的衣服由于颜色和材质不同可能会呈现与周围环境不同,因此在图像中可以加入纹理进行识别判断。反过来,在低温环境下,衣服保护热量辐射只有部分身体(头或手)能够呈像出来。即使它没有可见光表示的明显,但它依然能够表示目标人。
虽然上面提到的问题看起来行人识别很困难,但红外摄像被证明是很有应用前景的。
3.问题分析和设计选择
当设计这个系统时两个规则需要考虑:
- 设计的系统要满足物理和美学的需求;
- 对目标例如行人要规定宽和高的范围;
这个计算规则必须要考虑输入图像是低分辨率的数字图像。
A.视觉系统的设置
参照物理限制和图像考虑摄像机位置是固定的(如图1)。为了正确定位图像像素和真实世界之间的对应关系,沿着公路对距离进行标定(如图2),3D相关的这些点与图像中相对应的点能够计算出摄像机的角度。

计算的参数被用于真实的世界和图像像素的对应关系,在这种假设的环境下,图像视野是一条宽阔的路,交通工具都可以被忽略。事实上这种假设一般是不可能的,但是在这些区域中与交通工具相近(20米内)被认为相撞。在远的区域(大于20米)校准的错误可能会发生,这样产生的结果也不是太可信。
B.目标定义
一个具体的尺寸和宽高比被用来定义目标。行人尺寸被定义为如下值:i高:180cm+/-10%和ii宽:60cm+/-10%。
C.定义距离区域
在图像中行人在不同位置呈现不同的尺寸大小。事实上,不是所有可能的区域都要核实,主要根据计算时间和详细的内容。
事实上,距离较远的非常小的目标行人块包含非常低的信息量。在这些情况下,很容易报错,由于路上有很多非行人的目标,例如道路上的基础设施可能与人的形状很像。图3给出了列子,一个小的目标块包含低信息量。

目标块最大尺寸受限于图像的垂直分析度。
为了更精确的结果因此有必要定义目标块的范围。最大尺寸和最小尺寸如下:最小目标块:12*28像素;最大尺寸:42*100像素。事实上,这选择限制了交通工具的识别,在下文中将详细介绍。
校准被用于固定图像和真实世界之间的对应关系,距离6m或32m被考虑如图4a所示。图像呈现了两个行人与摄像机不同的距离,为了便于观察,图像显示了在不同的距离目标块含有的都是170cm高行人。
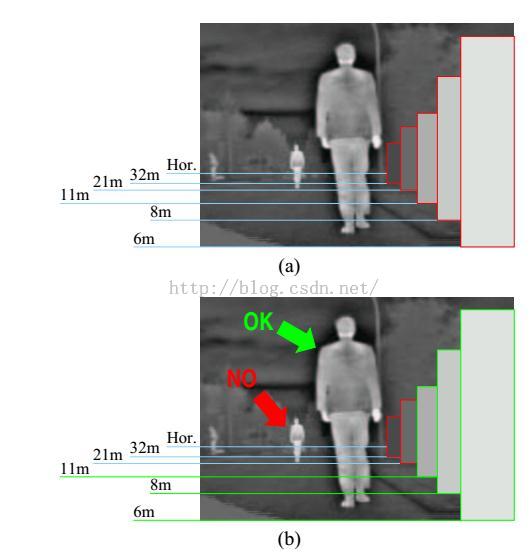
图4 (a)不同距离下行人不同的高度,不同距离包含170cm高的行人;(b)绿色表示170cm的行人能够看见。
图5显示了系统工作的区域。行人最小距离可以通过图看到,垂直虚线所表示。另一方面,行人具体的高度限制通过水平两条虚线表示。因此搜索区域在垂直虚线右边及两条水平虚线之间。
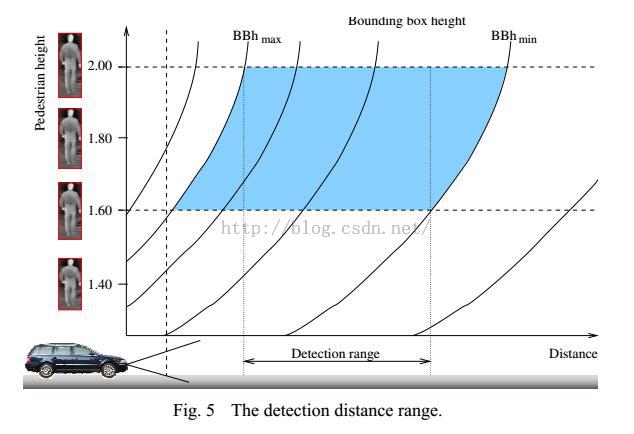
然而,需要考虑目标块的一些信息,以方便确定系统的工作区域。图表中附加的曲线表示目标块图的等边界:每一条曲线都描述了距离和目标块高度之间的关系。给定目标块的高度(BBhmax,BBhmin),系统工作范围是由上文提到的搜索区域和标注为BBhmax和BBhmin等边界区域的虚点所构成。
为了使在一个距离所有的行人都能被检测,要除去一部分遮挡的区域,工作区域限制于两个垂直的虚线内。箭头内是真正的距离范围。当前的设计选择距离范围是7m~20m。
对目标高度的增量或递减的距离范围的行为进行慎重考虑;换句话说,为了识别所有的行人,扩展目标高度范围就要缩短距离范围。
4.规则详细描述
规则被分为三部分:
- 基于对称性的可能的候选区域的定位;
- 基于非行人目标的特征对候选目标进行滤波,以滤除噪声 ;
- 利用行人的形态对候选目标进行简单的匹配验证;
最后的部分是当前正在发展的内容,它的结果需要通过将来的调查进行验证。
A.候选目标的产生
规则的低阶部分如图6所描述的,主要是基于对称性计算。输入图像被处理只针对感兴趣区域,则垂直边界也被提取了。输入图像和包含垂直边界的图像进行对称区域搜索,利用具体的宽高比和目标人相应的尺寸特征,当然也要考虑透视问题。在这些区域中的边界密度也要被考虑。

图7显示了原始的输入图像(图7a),二值图像包含垂直边界(图7.b),对每一个垂直对称坐标计算直方图,目标块具有最大的直方图值(图7.c)。
- 灰度对称(红色),
- 垂直边缘对称(绿色),
- 垂直边缘密度(黄色)。
图7 对称计算和焦点注意:(a)原图;(b)垂直边缘检测;
(c)灰度级对称性(红色),垂直边缘对称性(绿色),垂直边缘密度(黄色),结合所有(白色);
(d)灰度直方图和它全局平均值(红色)和局部平均值(绿色);
(e)可能的垂直对称轴的位置(在绿色里);
(f)只计算绿色线段的直方图
白色直方图表示上面的结合,目标行人的直方图具有一个局部峰值。
替代计算量大耗时的穷搜索算法对感兴趣区域进行定位。需要注意的是红外图像允许减少对称轴的数量。换句话说,由于行人的温度比背景高,滤波器可以删除较冷区域的对称轴。为了这个目的,直方图主要计算较热点;它的局部平均值(计算一个小窗)也是它整个平均值。低通滤波器被用来平滑直方图并去除与大峰值邻近的小峰值,整个平均值被用来标注在冷区域的直方图的峰值。
图7d显示了直方图,平均值(红色)和它的低通滤波(绿色);假设一个行人比他的背景热,计算的对称区域只是在直方图比平均值大或比局部平均值大的区域。特别是如图7e,横穿图像底部的绿色线的一部分被考虑做为对称轴,剩下的(横穿红色虚线)就忽略了。图7f给出了只用绿色计算的直方图。这降低了识别(假阳性数量减少)难度和并节省了计算时间。
候选目标通过直方图的阈值得到的。每一个超过阈值的峰值对应的目标块,都有可能是行人。此列表然后传递到下一个阶段进行处理,这部分主要是选择候选目标并删除一些噪声。
B.候选目标滤波器
对上文获取到的很可能是行人的候选目标利用行人特征进行滤波。换句话说,具体的滤波器参照一下几点设计:
- 以点、路标、建筑物或其它道路基础设施为中心的目标块都呈现高对称性;
- 由于行人在目标块中被归一化特征,目标块减少了上下部分的边界的计算;
目标块的边界被用于计算垂直直方图。对每一个目标块都进行操作。垂直直方图的形状被用来进行目标块滤波。3个标准已经被提出:
- 当直方图中心是空的时候,目标块剔除。对大空洞、电线塔、栅栏甚至他们不是垂直的都适用(如图8.a);
- 当直方图的一半多是空的时候,目标块被移除。对大垂直洞、电线塔、栅栏适用(如图8.b);
- 当直方图在目标块的中间部分,左边或右边是空的,或当直方图集中在两个小区域,这两个小区域具有80%的贡献,目标块被移除。对细的垂直洞、电线塔、栅栏适用(如图8.c)。
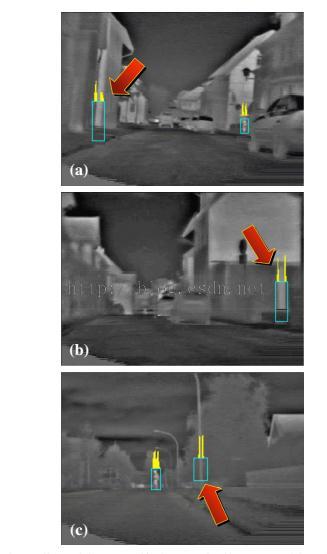
之后对每一个目标块的大小要重新调整,为了适应内部边缘要降低高度和宽度。目标块在被移除前会对尺寸修改很多,然而其它的目标块会再一次被滤波而删除:
- 目标块进行调整大小操作,与行人相比相差太大(如图9箭头1);
- 目标块不总是满足透视限制(如图9箭头2);
- 目标块不总是满足原始宽高比的假设(如图9箭头3)。
C.多变的候选目标
下面部分介绍当前的研究进展,研究结果也是当前简单的实验结果。
每一个目标块通过简单的行人形态特征进行匹配确认,基于形状的这个滤波器被用来移除候选目标不满足行人的形态特征、或不满足行人的温度。
图10显示了利用匹配得到的结果;根据目标块的尺寸模型被调整大小,之后与灰度图像进行匹配。对结果进行判断,低于阈值的候选目标被删除。
图10b显示了两个目标块进行判断的结果:高温的表示真正的行人,低温的表示树。即使树的形状与人相近,滤波器依然会把它滤除。
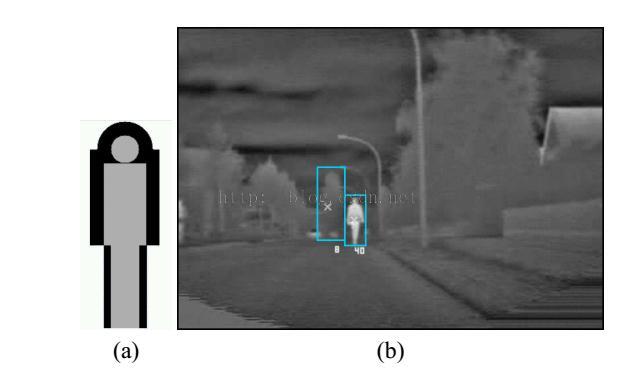
图10 (a)行人简单的形态特征;(b)利用形态特征对行人进行匹配,并对非行人目标进行滤除。
5.讨论与结果
图11给出了红外摄像头下一些行人识别的结果。两条水平绿线表示行人搜索的距离(7m到20m),水平白线表示平坦路无交通工具出现。只计算距离区域内的高温行人。
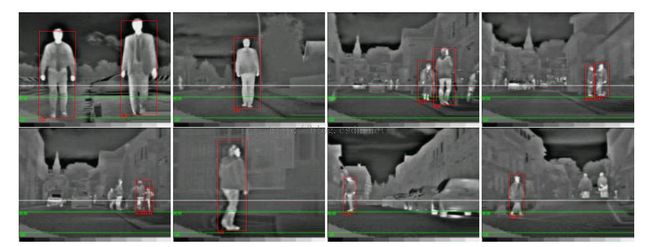
图11 行人在不同状态下的结果:复杂环境、简单环境、1个或多个行人。
在目标块的下面是标识的是距离。两个水平绿线的范围是行人搜索区域,白线是边界。
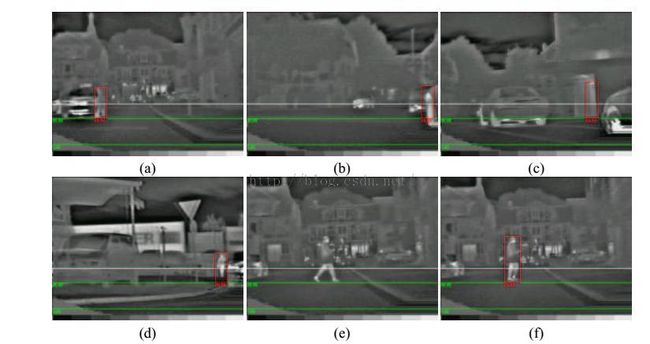
结果显示在复杂的背景环境下依然能够识别一或多个行人。主要的情况如图12:
- 在复杂的背景中,包含建筑物或其它的目标,行人偶尔被识别(如图12a,12b,12c);
- 能够识别出行人,但对其具体的位置或目标块尺寸计算的不是太准确,因此导致距离估计失败(如图12d);
- 步行的人明显没有被识别由于宽高比的限制(如图12e);在下面的帧序列中(图12f)相同的行人仍然能够正确的识别,跟踪被应用解决这些问题。
快速发展的技术会解决在复杂环境下的检测问题。大量的测试也将会在不同的天气状况下进行。下一步工作使用3D模型来增强识别效果。