图像分割之(二)Graph Cut(图割)
上一文对主要的分割方法做了一个概述。那下面我们对其中几个比较感兴趣的算法做个学习。下面主要是Graph Cut,下一个博文我们再学习下Grab Cut,两者都是基于图论的分割方法。另外OpenCV实现了Grab Cut,具体的源码解读见博文更新。接触时间有限,若有错误,还望各位前辈指正,谢谢。
Graph cuts是一种十分有用和流行的能量优化算法,在计算机视觉领域普遍应用于前背景分割(Image segmentation)、立体视觉(stereo vision)、抠图(Image matting)等。
此类方法把图像分割问题与图的最小割(min cut)问题相关联。首先用一个无向图G=<V,E>表示要分割的图像,V和E分别是顶点(vertex)和边(edge)的集合。此处的Graph和普通的Graph稍有不同。普通的图由顶点和边构成,如果边的有方向的,这样的图被则称为有向图,否则为无向图,且边是有权值的,不同的边可以有不同的权值,分别代表不同的物理意义。而Graph Cuts图是在普通图的基础上多了2个顶点,这2个顶点分别用符号”S”和”T”表示,统称为终端顶点。其它所有的顶点都必须和这2个顶点相连形成边集合中的一部分。所以Graph Cuts中有两种顶点,也有两种边。
第一种顶点和边是:第一种普通顶点对应于图像中的每个像素。每两个邻域顶点(对应于图像中每两个邻域像素)的连接就是一条边。这种边也叫n-links。
第二种顶点和边是:除图像像素外,还有另外两个终端顶点,叫S(source:源点,取源头之意)和T(sink:汇点,取汇聚之意)。每个普通顶点和这2个终端顶点之间都有连接,组成第二种边。这种边也叫t-links。

上图就是一个图像对应的s-t图,每个像素对应图中的一个相应顶点,另外还有s和t两个顶点。上图有两种边,实线的边表示每两个邻域普通顶点连接的边n-links,虚线的边表示每个普通顶点与s和t连接的边t-links。在前后景分割中,s一般表示前景目标,t一般表示背景。
图中每条边都有一个非负的权值we,也可以理解为cost(代价或者费用)。一个cut(割)就是图中边集合E的一个子集C,那这个割的cost(表示为|C|)就是边子集C的所有边的权值的总和。
Graph Cuts中的Cuts是指这样一个边的集合,很显然这些边集合包括了上面2种边,该集合中所有边的断开会导致残留”S”和”T”图的分开,所以就称为“割”。如果一个割,它的边的所有权值之和最小,那么这个就称为最小割,也就是图割的结果。而福特-富克森定理表明,网路的最大流max flow与最小割min cut相等。所以由Boykov和Kolmogorov发明的max-flow/min-cut算法就可以用来获得s-t图的最小割。这个最小割把图的顶点划分为两个不相交的子集S和T,其中s ∈S,t∈ T和S∪T=V 。这两个子集就对应于图像的前景像素集和背景像素集,那就相当于完成了图像分割。
也就是说图中边的权值就决定了最后的分割结果,那么这些边的权值怎么确定呢?
图像分割可以看成pixel labeling(像素标记)问题,目标(s-node)的label设为1,背景(t-node)的label设为0,这个过程可以通过最小化图割来最小化能量函数得到。那很明显,发生在目标和背景的边界处的cut就是我们想要的(相当于把图像中背景和目标连接的地方割开,那就相当于把其分割了)。同时,这时候能量也应该是最小的。假设整幅图像的标签label(每个像素的label)为L= {l1,l2,,,, lp },其中li为0(背景)或者1(目标)。那假设图像的分割为L时,图像的能量可以表示为:
E(L)=aR(L)+B(L)
其中,R(L)为区域项(regional term),B(L)为边界项(boundary term),而a就是区域项和边界项之间的重要因子,决定它们对能量的影响大小。如果a为0,那么就只考虑边界因素,不考虑区域因素。E(L)表示的是权值,即损失函数,也叫能量函数,图割的目标就是优化能量函数使其值达到最小。
区域项:
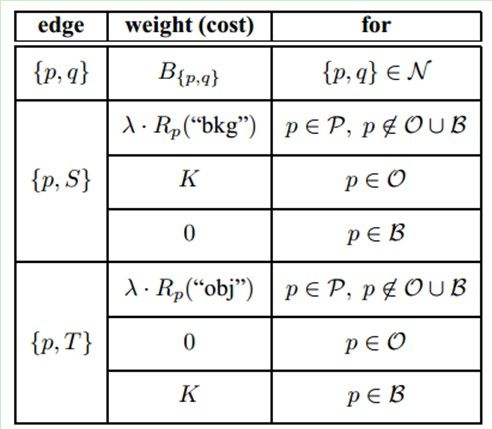
 ,其中Rp(lp)表示为像素p分配标签lp的惩罚,Rp(lp)能量项的权值可以通过比较像素p的灰度和给定的目标和前景的灰度直方图来获得,换句话说就是像素p属于标签lp的概率,我希望像素p分配为其概率最大的标签lp,这时候我们希望能量最小,所以一般取概率的负对数值,故t-link的权值如下:
,其中Rp(lp)表示为像素p分配标签lp的惩罚,Rp(lp)能量项的权值可以通过比较像素p的灰度和给定的目标和前景的灰度直方图来获得,换句话说就是像素p属于标签lp的概率,我希望像素p分配为其概率最大的标签lp,这时候我们希望能量最小,所以一般取概率的负对数值,故t-link的权值如下:
Rp(1) = -ln Pr(Ip|’obj’); Rp(0) = -ln Pr(Ip|’bkg’)
由上面两个公式可以看到,当像素p的灰度值属于目标的概率Pr(Ip|’obj’)大于背景Pr(Ip|’bkg’),那么Rp(1)就小于Rp(0),也就是说当像素p更有可能属于目标时,将p归类为目标就会使能量R(L)小。那么,如果全部的像素都被正确划分为目标或者背景,那么这时候能量就是最小的。
边界项:

其中,p和q为邻域像素,边界平滑项主要体现分割L的边界属性,B<p,q>可以解析为像素p和q之间不连续的惩罚,一般来说如果p和q越相似(例如它们的灰度),那么B<p,q>越大,如果他们非常不同,那么B<p,q>就接近于0。换句话说,如果两邻域像素差别很小,那么它属于同一个目标或者同一背景的可能性就很大,如果他们的差别很大,那说明这两个像素很有可能处于目标和背景的边缘部分,则被分割开的可能性比较大,所以当两邻域像素差别越大,B<p,q>越小,即能量越小。
好了,现在我们来总结一下:我们目标是将一幅图像分为目标和背景两个不相交的部分,我们运用图分割技术来实现。首先,图由顶点和边来组成,边有权值。那我们需要构建一个图,这个图有两类顶点,两类边和两类权值。普通顶点由图像每个像素组成,然后每两个邻域像素之间存在一条边,它的权值由上面说的“边界平滑能量项”来决定。还有两个终端顶点s(目标)和t(背景),每个普通顶点和s都存在连接,也就是边,边的权值由“区域能量项”Rp(1)来决定,每个普通顶点和t连接的边的权值由“区域能量项”Rp(0)来决定。这样所有边的权值就可以确定了,也就是图就确定了。这时候,就可以通过min cut算法来找到最小的割,这个min cut就是权值和最小的边的集合,这些边的断开恰好可以使目标和背景被分割开,也就是min cut对应于能量的最小化。而min cut和图的max flow是等效的,故可以通过max flow算法来找到s-t图的min cut。目前的算法主要有:
1) Goldberg-Tarjan
2) Ford-Fulkerson
3) 上诉两种方法的改进算法
权值:
Graph cut的3x3图像分割示意图:我们取两个种子点(就是人为的指定分别属于目标和背景的两个像素点),然后我们建立一个图,图中边的粗细表示对应权值的大小,然后找到权值和最小的边的组合,也就是(c)中的cut,即完成了图像分割的功能。

上面具体的细节请参考:
《Interactive Graph Cuts for Optimal Boundary & Region Segmentation of Objects in N-D Images》(Boykov,iccv01)这篇paper讲怎么用graphcut来做image segmentation。
在Boykov 和 Kolmogorov 俩人的主页上就有大量的code。包括maxflow/min-cut、stereo algorithms等算法:
http://pub.ist.ac.at/~vnk/software.html
http://vision.csd.uwo.ca/code/
康奈尔大学的graphcuts研究主页也有不少信息:
http://www.cs.cornell.edu/~rdz/graphcuts.html
《Image Segmentation: A Survey of Graph-cut Methods》(Faliu Yi,ICSAI 2012)