tslib的安装
tslib是嵌入式开发中使用qt开发之前需要搭建的一个必须的环境,通过tslib,你编写的qt程序才能通过触摸屏进行操作,而tslib进行进行你的qt程序和硬件之间的接口,因此,
学会如何搭建tslib是进行嵌入式开发的一个重要的环节。
安装tslib之前需要的在你的linux系统下面安装:
sudo apt-get install automake libtool 如果没有安装,将会出现一些不可预料的错误。
ps:本博主使用的环境是在ubunt 12.04下面的编写tslib环境以及移植到Contex A8平台上面。
使用的tslib-1.0.tar.bz2。 下载链接:http://download.csdn.net/download/kev65629/2029241
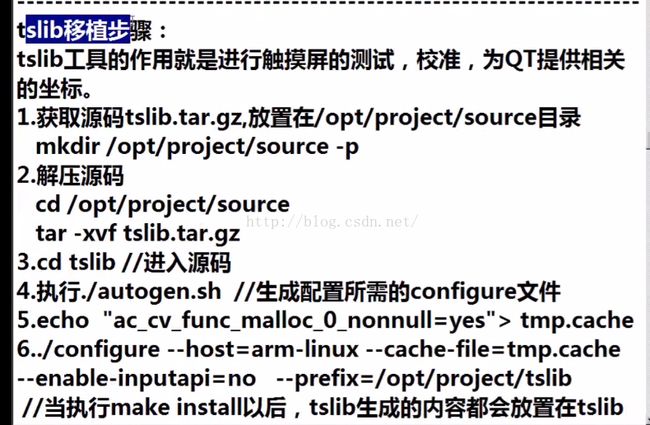
$ ./autogen.sh
$ ./configure CC=arm-linux-gnueabihf-gcc CXX=arm-linux-gnueabihf-g++ --prefix=/usr/local/tslib --host=arm-linux-gnueabihf ac_cv_func_malloc_0_nonnull=yes
。
我自己总结在我的编写过程中遇到的错误。
安装tslib中遇到的错误:./autogen.sh: 4: autoreconf: not found
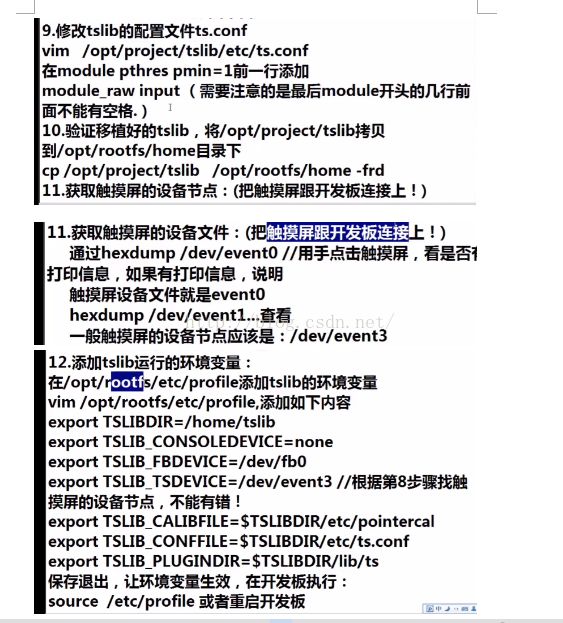
在arm板上执行./xxx -qws报错:could not read calibration:"/etc/pointercal"
分享| 2014-01-15 14:09 shanghl417 |浏览 1477次
CPU
我现在在是内核2.6.29,tslib版本1.4的,在板子上执行可执行程序报错could not read calibration:"/etc/pointercal",点击板子是没有反应
2014-01-15 14:37 提问者采纳
报这个错误是因为你没有进行屏幕校准,或者是pointercal这个文件被删除了。
运行一下:ts_calibrate重新校准一下,这样就能重新生成pointercal文件
./autogen.sh: 4: autoreconf: not found
是在不同版本的 tslib 下执行 autogen.sh 产生。它们产生的原因一样,是
因为没有安装
automake 工具, (ubuntu 8.04)用下面的命令安装好就可以了。
sudo apt-get install autoconf automake libtool
Linux下编译tslib,configure之前都正常,但make后就出现错误啦,求解。。
分享| 2012-03-18 23:14 hc07124988 | 浏览1218 次 悬赏:5
编程语言
终端里最后的内容如下:
In function ‘open’,
inlined from ‘main’at ts_calibrate.c:227:
/usr/include/bits/fcntl2.h:51: error: call to ‘__open_missing_mode’declared with attribute error: open with O_CREAT in second argument needs 3 arguments
In function ‘open’,
inlined from ‘main’at ts_calibrate.c:229:
/usr/include/bits/fcntl2.h:51: error: call to ‘__open_missing_mode’declared with attribute error: open with O_CREAT in second argument needs 3 arguments
make[2]: *** [ts_calibrate.o] 错误 1
make[2]:正在离开目录 `/opt/qt/tslib/tests'
make[1]: *** [all-recursive] 错误 1
make[1]:正在离开目录 `/opt/qt/tslib'
make: *** [all] 错误 2
2013-12-14 10:07 网友采纳
gcc 新版本编译器对语法检查严格,在源文件 ./tests/ts_calibrate.c中
// 源文件
// if ((calfile = getenv("TSLIB_CALIBFILE")) != NULL) {
// cal_fd = open (calfile, O_CREAT | O_RDWR);
// } else {
// cal_fd = open ("/etc/pointercal", O_CREAT | O_RDWR);
// }
// 需要更改成如下形式
if ((calfile = getenv("TSLIB_CALIBFILE")) != NULL) {
cal_fd = open (calfile, O_CREAT | O_RDWR, 0777);
} else {
cal_fd = open ("/etc/pointercal", O_CREAT | O_RDWR, 0777);
}保存后重新编译即可