类神经网络的角点检测方法
今天阅读了一篇论文里面提到一种类神经网络模型Connectionist Model的角点检测方法,非常有意思,虽然说这篇论文里面介绍的方法结构特征复杂(图像的每个点都需要一对神经元的表示),而且只能针对于结构简单二值或灰度图像,但这个方法非常有启发性。
如今提到角点检测,大概不外乎两种思路。第一种方法就是通过一阶或二阶梯度,获得局部角程度描述,包括了Harris算子等,这种思路最容易理解,研究也多,应用也广泛,效果也比较出色。第二种方法就是从边缘曲线出发,找到边缘曲度变化最大的地方,这种方法需要依赖于边缘曲线提取精度,所以非常不稳定。
我所读的这篇文章利用神经网络的方法也并不稀奇,早在90年代初,就有人用过这样的方法,不过一般都是先建立一系列的角点模板,然后通过神经网络去匹配,计算量较大,而效果也并不突出(主要是由于角点出现的可能情况,远比人工建立的模板多)
JayantaBasak这篇文章的思路就是有这么几点:
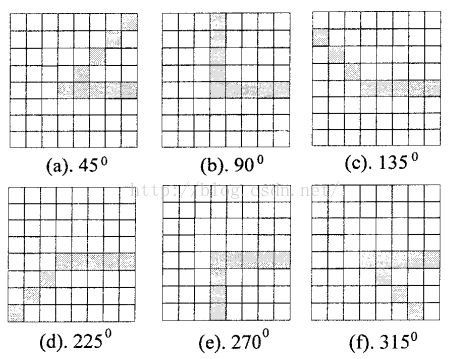
(1)图像的尺度越粗糙(被平滑后,或放大),角点的角程度就越不明显(实际上表现为你在较大尺度上看物体,一些角点会看不到),反之图像尺度越精细,会带来更多细小角点,而这个尺度粗细描述也可以角点的视察邻域的大小变化。
(2)在小邻域里面,角点周围的点也会受到角点影响,带有一定的角程度,而角点拥有局部最大值。
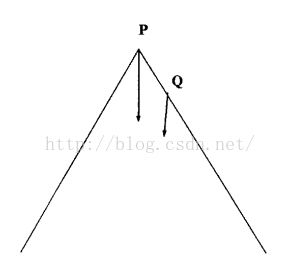
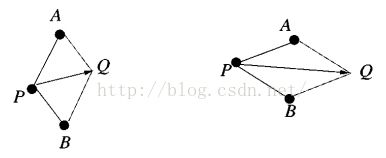
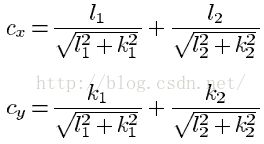
(3)角点的角程度用一个角度向量表示,角度向量是由角点与其邻域上边界点向量的和,将其分解为x,y方向上的两个标量,分别各作为一组神经网络的输入
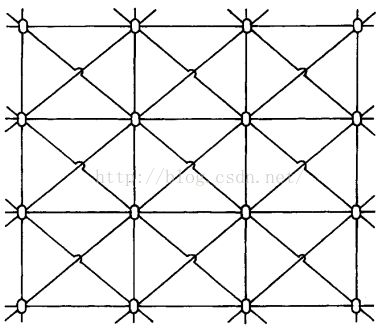
(4)对于M*N大小图像共有2M*2N个神经元,每个像素点都有一对神经元,分别表示其角度向量的x,y分量,这两个分量的神经元没有互连,每个神经元同其邻域的点都相连,每个神经元另外还有一个自我负反馈(为了排除噪声的影响)
下面正题——大概的算法思路
(1)角度向量的初始化:找到点其3*3邻域的两个边界点![]() (论文里用的主要是二值图,这里的边缘点实际上指像素不为0点),计算其角度向量,其x,y分量分别作为两组神经网络的输入,两者都没有互连。
(论文里用的主要是二值图,这里的边缘点实际上指像素不为0点),计算其角度向量,其x,y分量分别作为两组神经网络的输入,两者都没有互连。
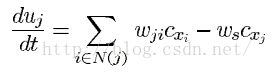
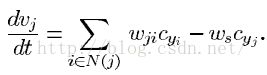
(2)之后,经由神经网络自学习过程,不用再进行额外的输入了,以下是神经元的自我更新公式:
![]()
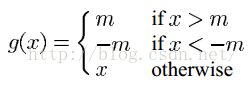
这里的j是当前神经元,i是属于其邻域N(j)的神经元,wij是神经元之间的连接权值,cxi是神经元i给j的输入(这里是个斜坡函数,也可以理解为经过一个激活函数),uj是指神经元j的当前时间的输出,其关于时间的t的变化等于其邻域神经元的输入权值和减去自身反馈。(这里可能有点难以理解,直观的讲,一是其邻域的角度正反馈会提高当前点的角程度,二是如果没有周围邻域的角度正反馈,自身的负反馈会减少自身从而达到排除噪声的目的,因为噪声一般都是孤立的。这里可以结合思路(2)里好好想想)
![]()
神经元的连接权值实际上是与邻域的半径有关的,我们先前已经知道了,思路(1)里说图像的尺度越粗糙,角点的角程度就越不明显,这时需要较大权值,而随着尺度越精细,角程度就越明显,权值也在变小。那么问题就是为什么我们需要让邻域的半径随着时间缩小呢?因为在大的尺度下,我们可以排除小的毛刺角点影响(被尺度平滑了),而随着尺度的缩小,我们又可以进一步精化角点位置,这好像又是另一种多尺度的思想了。
(3)收敛性考虑,当r<1.5时,那么停止,此时可以得到每个点的最终角向量值,找到局部最大值即为角点,这里还需要设置一个阈值,把小的局部点变化排除。对于给定的半径r,神经网络整体能量:
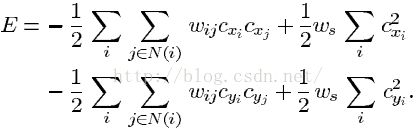
其关于时间变化的导数如下,可以分析出,它是随时间变化,慢慢接近于0的:
参考文献:
A Connectionist Model for Corner Detectionin Binary and Gray Images