C++调用Matlab画图 V2.0
实现功能
通过C++调用Matlab的接口来实现plot的部分功能。
程序依赖
代码依赖:Matlab,Eigen,Boost
测试版本:Matlab2015B,Eigen3.2.8,Boost1.57.0
适合人群:代码发烧友
程序代码
代码1:matlab.hpp
#ifndef __MATLAB_HPP__
#define __MATLAB_HPP__
#include <engine.h>
#include <string>
#include <iostream>
#include <boost\algorithm\string.hpp>
std::string rndcolor(){
std::string color = "[";
color += std::to_string((rand() % 256) / 255.) + ",";
color += std::to_string((rand() % 256) / 255.) + ",";
color += std::to_string((rand() % 256) / 255.) + "]";
return color;
}
class MatArray
{
public:
MatArray() : _data(NULL){}
MatArray(size_t irows, size_t icols){
resize(irows, icols);
}
MatArray(const MatArray &obj){
if (obj._data){
_data = mxCreateDoubleMatrix(obj.rows(), obj.cols(), mxREAL);
memcpy(this->ptr(), obj.ptr(), sizeof(double)*rows()*cols());
}
else{
_data = NULL;
}
}
~MatArray(){ mxDestroyArray(_data); _data = NULL; }
inline size_t rows() const { return _data ? mxGetM(_data) : 0; }
inline size_t cols() const { return _data ? mxGetN(_data) : 0; }
inline double* ptr() const { return _data ? mxGetPr(_data) : NULL; }
bool resize(size_t irows, size_t icols){
if (!_data){
_data = mxCreateDoubleMatrix(irows, icols, mxREAL);
return (_data != NULL);
}
if (rows() == irows || cols() == icols){
return true;
}
mxDestroyArray(_data);
_data = mxCreateDoubleMatrix(irows, icols, mxREAL);
return (_data != NULL);
}
int put(Engine *ep, const char* var_name){
return engPutVariable(ep, var_name, _data);
}
template<class EigenMat = Eigen::MatrixXf>
void copy_from_eigen(const EigenMat &emat){
if (emat.rows()*emat.cols() == 0){
mxDestroyArray(_data); _data = NULL;
}
resize(emat.rows(), emat.cols());
for (int c = 0; c < emat.cols(); c++){
for (int r = 0; r < emat.rows(); r++){
(*this)[r + c*(int)(emat.rows())] = emat(r, c);
}
}
}
inline double& operator[](int i){
return ptr()[i];
}
private:
mxArray *_data;
};
class Matlab
{
private:
Matlab(const Matlab &obj){}
public:
Matlab(){
_engine = engOpen(NULL);
if (!_engine){
std::cerr << "failed to open MATLAB engine!" << std::endl;
}
else{
std::cout << "MATLAB has been started successfully!" << std::endl;
}
}
~Matlab(){
// if you are testing algorithm, you are encouraged to keep the line below bing committed.
//engClose(_engine); _engine = NULL;
}
// line_spec : "LineStyle" + "Marker" + "Color", e.g. "-or"
// for line
// "LineStyle" = {"none", "-", ":", "-."}
// "LineWidth" = 0.5
// "Color" = {[0 0.4470 0.7410] (default) | RGB triplet | {y,m,c,r,g,b,w,k} | 'none'}
// for Marker
// "Marker" = {"none", "o", "+", "*", ".", "x", "s", "d", "^", "v", ">", "<", 'p', 'h'}
// "MarkerEdgeColor" = 'auto' (default) | 'none' | RGB triplet | {y,m,c,r,g,b,w,k}
// "MarkerFaceColor" = 'auto' (default) | 'none' | RGB triplet | {y,m,c,r,g,b,w,k}
// "MarkerSize" = 6
template<class TMatX = Eigen::MatrixXf, class TMatY = Eigen::MatrixXf, class TMask = Eigen::MatrixXi>
int plot(const TMatX &X, const TMatY &Y, const TMask &mask,
std::string nm0 = "",
std::string nm1 = "", std::string nm2 = "",
std::string nm3 = "", std::string nm4 = "",
std::string nm5 = "", std::string nm6 = "",
std::string nm7 = "", std::string nm8 = "",
std::string nm9 = "", std::string nm10 = "",
std::string nm11 = "", std::string nm12 = "",
std::string nm13 = "", std::string nm14 = ""
){
MatArray MX, MY, MS;
MX.copy_from_eigen(X); MX.put(_engine, "MX");
MY.copy_from_eigen(Y); MY.put(_engine, "MY");
MS.copy_from_eigen(mask); MS.put(_engine, "MS");
std::string plot_code = "MX(MS>0), MY(MS>0)";
std::string code;
#define EVL_CODE(_ARG0,_ARG1) code = var_plot_code(nm##_ARG0, nm##_ARG1); if(code != ""){ plot_code += ", " + code;}
code = var_plot_code(nm0, "");
if (code != ""){
plot_code += ", " + code;
EVL_CODE(1, 2);EVL_CODE(3, 4);EVL_CODE(5, 6);EVL_CODE(7, 8);EVL_CODE(9, 10);EVL_CODE(11, 12);EVL_CODE(13, 14);
}
else{
EVL_CODE(0, 1);EVL_CODE(2, 3);EVL_CODE(4, 5);EVL_CODE(6, 7);EVL_CODE(8, 9);EVL_CODE(10, 11);EVL_CODE(12, 13);
}
#undef EVL_CODE
plot_code = "plot(" + plot_code + ");";
std::cout << plot_code << std::endl;
exec(plot_code);
return 0;
}
// line_spec : "LineStyle" + "Marker" + "Color", e.g. "-or"
// for line
// "LineStyle" = {"none", "-", ":", "-."}
// "LineWidth" = 0.5
// "Color" = {[0 0.4470 0.7410] (default) | RGB triplet | {y,m,c,r,g,b,w,k} | 'none'}
// for Marker
// "Marker" = {"none", "o", "+", "*", ".", "x", "s", "d", "^", "v", ">", "<", 'p', 'h'}
// "MarkerEdgeColor" = 'auto' (default) | 'none' | RGB triplet | {y,m,c,r,g,b,w,k}
// "MarkerFaceColor" = 'auto' (default) | 'none' | RGB triplet | {y,m,c,r,g,b,w,k}
// "MarkerSize" = 6
template<class TMatX = Eigen::MatrixXf, class TMatY = Eigen::MatrixXf>
int plot(const TMatX &X, const TMatY &Y,
std::string nm0 = "",
std::string nm1 = "", std::string nm2 = "",
std::string nm3 = "", std::string nm4 = "",
std::string nm5 = "", std::string nm6 = "",
std::string nm7 = "", std::string nm8 = "",
std::string nm9 = "", std::string nm10 = "",
std::string nm11 = "", std::string nm12 = "",
std::string nm13 = "", std::string nm14 = ""
){
MatArray MX, MY;
MX.copy_from_eigen(X); MX.put(_engine, "MX");
MY.copy_from_eigen(Y); MY.put(_engine, "MY");
std::string plot_code = "MX, MY";
std::string code;
#define EVL_CODE(_ARG0,_ARG1) code = var_plot_code(nm##_ARG0, nm##_ARG1); if(code != ""){ plot_code += ", " + code;}
code = var_plot_code(nm0, "");
if (code != ""){
plot_code += ", " + code;
EVL_CODE(1, 2);EVL_CODE(3, 4);EVL_CODE(5, 6);EVL_CODE(7, 8);EVL_CODE(9, 10);EVL_CODE(11, 12);EVL_CODE(13, 14);
}
else{
EVL_CODE(0, 1);EVL_CODE(2, 3);EVL_CODE(4, 5);EVL_CODE(6, 7);EVL_CODE(8, 9);EVL_CODE(10, 11);EVL_CODE(12, 13);
}
#undef EVL_CODE
plot_code = "plot(" + plot_code + ");";
std::cout << plot_code << std::endl;
exec(plot_code);
return 0;
}
#define TEMPLATE_PLOT(ARG3) \
template<class TMatX = Eigen::MatrixXf, class TMatY = Eigen::MatrixXf> \
int plot(const TMatX &X, const TMatY &Y, \
ARG3 nm0 = "" , \
std::string nm1 = "", std::string nm2 = "", \
std::string nm3 = "", std::string nm4 = "", \
std::string nm5 = "", std::string nm6 = "", \
std::string nm7 = "", std::string nm8 = "", \
std::string nm9 = "", std::string nm10 = "", \
std::string nm11 = "", std::string nm12 = "", \
std::string nm13 = "", std::string nm14 = ""){ \
return plot(X, Y, std::string(nm0), nm1, nm2, nm3, nm4, nm5, nm6, nm7, nm8, nm9, nm10, nm11, nm12, nm13, nm14); \
}
TEMPLATE_PLOT(char*);
TEMPLATE_PLOT(const char*);
#undef TEMPLATE_PLOT
int exec(std::string cmd){
return engEvalString(_engine, cmd.c_str());
}
protected:
std::string var_plot_code(std::string nm, std::string var){
boost::trim(nm); boost::trim(var);
if (nm == ""){
return "";
}
std::string code = "'" + nm + "'";
if (var == ""){
return (nm[0] < 'A' || nm[0] > 'Z') ? code : "";
}
if (nm == "LineStyle" || nm == "Marker"){ // string
// 'LineStyle', '-'
return code + ", '" + var + "'";
}
if (nm == "LineWidth" || nm == "MarkerSize"){ // positive number
// 'LineWidth', 0.5
return code + ", " + var;
}
if (nm == "Color" || nm == "MarkerEdgeColor" || nm == "MarkerFaceColor"){
if (var[0] == '['){
return code + ", " + var;
}
else{
return code + ", '" + var + "'";
}
}
return "";
}
private:
Engine *_engine;
};
#endif实验测试
测试代码:
#include <Eigen/Eigen>
#include "matlab.hpp"
int main(int argc, char** argv){
Matlab g_eng;
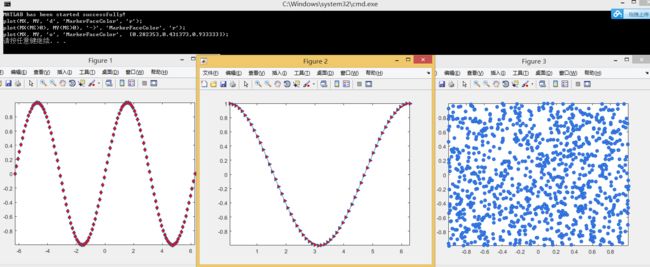
Eigen::ArrayXf X = Eigen::ArrayXf::LinSpaced(120, -3.1415926f*2.f, 2.f*3.1415926f);
g_eng.exec("figure(1); clf;");
g_eng.plot(X, X.sin(), "d", "MarkerFaceColor", "r");
g_eng.exec("axis tight;");
g_eng.exec("figure(2); clf;");
g_eng.plot(X, X.cos(), X > 0, "->", "MarkerFaceColor", "r");
g_eng.exec("axis tight;");
Eigen::ArrayXXf data;
data = data.Random(1000,2);
g_eng.exec("figure(3); clf;");
g_eng.plot(data.col(0), data.col(1), "o", "MarkerFaceColor", rndcolor());
g_eng.exec("axis tight;");
return EXIT_SUCCESS;
}实验结果: