红外接收程序
声明部分内容摘自:
http://www.hificat.com/dpj_step/compositive_7.html
http://www.ceet.hbnu.edu.cn/bbs/viewthread.php?tid=102
转自:http://my.oschina.net/jayzonex/blog/10649
1、红外遥控系统
通用红外遥控系统由发射和接收两大部分组成,应用编/解码专用集成电路芯片来进行控制操作,如图1所示。
发射部分包括键盘矩阵、编码调制、LED红外发送器;
接收部分包括光、电转换放大器、解调、解码电路。
发射部分包括键盘矩阵、编码调制、LED红外发送器;
接收部分包括光、电转换放大器、解调、解码电路。

下面,我们将使用下面两种设备:

另外,使用51单片机进行解码。
2、原理图
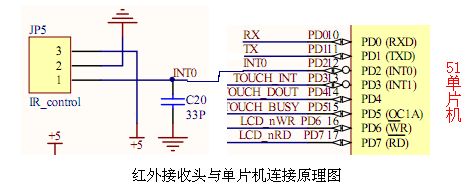
从原理图看出,IR的data脚与51的PD2(P3.2)相连。
2、红外发射原理
要对红外遥控器所发的信号进行解码,必须先理解这些信号。
a) 波形
首先来看看,当我们按下遥控器时,红外发射器是发送了一个什么样的信号波形,如下图:

由上图所示,当一个键按下超过22ms,振荡器使芯片激活,将发射一组108ms的编码脉冲(由位置1所示)。如果键按下超过108ms仍未松开,接下来发射的代码(连发代码由位置3所示)将仅由起始码(9ms)和结束码(2.5ms)组成。下面把位置1的波形放大:
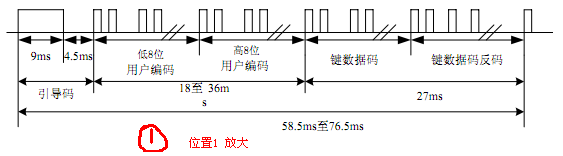
由位置1的波形得知,这108ms发射代码由一个起始码(9ms),一个结果码(4.5ms),低8位地址码(用户编码)(9ms~18ms),高8位地址码(用户编码)(9ms~18ms),8位数据码(键值数据码)(9ms~18ms)和这8位数据的反码(键值数据码反码)(9ms~18ms)组成。
b) 编码格式
遥控器发射的信号由一串0和1的二进制代码组成.不同的芯片对0和1的编码有所不同。通常有曼彻斯特编码和脉冲宽度编码。XS-091遥控板的0和1采用PWM方法编码,即脉冲宽度调制。下图为一个发射波形对应的编码方法:

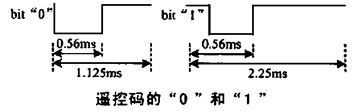
放大0和1的波形如下图:

这种编码具有以下特征:以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”。
3、红外接收原理
a) 波形
红外接收头将38K载波信号过虑,接收到的波形刚好与发射波形相反:

放大,位定义0和位定义1波形如下:
4、解码原理及算法
注:代码宽度算法:
16位地址码的最短宽度:1.12×16=18ms 16位地址码的最长宽度:2.24ms×16=36ms
可以得知8位数据代码及其8位反代码的宽度和不变:(1.12ms+2.24ms)×8=27ms
所有32位代码的宽度为(18ms+27ms)~(36ms+27ms)
对于红外线遥控对于很多电子爱好者来讲,都感觉到非常神奇,看不到,摸不着,但能实现无线遥控,其实控制的关键就是我们要用单片机芯片来识别红外线遥控器发出红外光信号,即我们通常所说的解码。单片机得知发过来的是什么信号,然后再做出相应的判断与控制,如我们按电视机遥控器的频道按钮,则单片机会控制更换电视频道,如按的是遥控器音量键,则单片机会控制增减音量。
解码的关键是如何识别“0”和“1” !!
从位的定义我们可以发现“0”、“1”均以 0.56ms的低电平开始,不同的是高电平的宽度不同!,“0”为0.56ms,“1”为1.68ms,所以必须根据高电平的宽度区别“0”和“1”。
如果从0.56ms低电平过后,开始延时,0.56ms以后,若读到的电平为低,说明该位为“0”,反之则为“1”,为了可靠起见,延时必须比0.56ms长些,但又不能超过1.12ms,否则如果该位为“0”,读到的已是下一位的高电平,因此取(1.12ms+0.56ms)/2=0.84ms最为可靠,一般取0.84ms左右均可。根据码的格式,应该等待9ms的起始码和4.5ms的结果码完成后才能读码。
5、实例代码:
注意一下几点:
1. 从上面“红外接收头与单片机连接原理图”来看,红外接收头的型号脚是与51的int0相连,所以需要使用INT0(外部中断0).
2. 由于解码过程中涉及到延时,为精确起见,我们选择使用定期时1来计时。
实例代码:
#include
#include
// 函数原型
void SystemInit(void);
void Delay_840us(void);
void Delay_2400us(void);
void LedDisp();
unsigned char GetCode(void);//获得码
void delay(unsigned char loop);
// 位变量
sbit IRIN = P3^2;
sbit BEEP = P1^6;
sbit swch = P1^7;
// 变量
unsigned char KeyValue; //机器码
unsigned char MaValue; //键值码;
unsigned char disbuf[4]; //数码管显示缓冲
unsigned char scan[4]={0x04,0x08,0x10,0x20}; //p2位选择
unsigned char code table[16] = //共陰碼
{0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7C,0x39,0x5E,0x79,0x71};
/**
* 延时
*/
void delay(unsigned char loop)
{
unsigned char i;
for(i=0;i>8);
TR1=1;
while(!TF1);
TF1=0;
TR1=0;
}
/**
* 延时9ms
*/
void Delay_9000us(void)
{
TL1 = 153.6;
TH1 = 223.6;
TR1 = 1;
while(!TF1);
TF1 = 0;
TR1 = 0;
}
/**
* 延时4.5ms
*/
void Delay_4500us(void)
{
TH1 = 239.8;
TL1 = 204.8;
TR1 = 1;
while(!TF1);
TF1 = 0;
TR1 = 0;
}
/**
* 系统初始化
*/
void SystemInit(void)
{
IRIN = 1;
IT0 = 1; //INT0负跳变触发
TMOD = 0x10; //定时器1工作在方式1
EA = 1;
EX0 = 1;
}
/**
* 读码
*/
unsigned char GetCode()
{
unsigned char n;
static temp = 0;
for( n = 0; n < 8; n++ )
{
while(!IRIN); // 等待高电平,开始解码
Delay_840us(); // 延时0.84ms
if(IRIN) // 若仍然为高电平,则为1,否则为0
{
temp = (0x80|(temp>>1)); // 1
while(IRIN); //等待跳变成低电平
}
else {
temp=(0x00|(temp>>1)); // 0
}
}
return temp;
}
/**
* 数码管显示
*/
void LedDisp()
{
unsigned char i;
for(i=0;i<4;i++)
{
P0=table[disbuf[i]];
P2 = scan[i];
delay(50);
P0=0x00;
}
}
void main(void)
{
SystemInit();
while(1)
{
//以下是查表显示
disbuf[0]=(((KeyValue&0xf0)>>4)&0x0f);
disbuf[1]=KeyValue&0x0f;
disbuf[2]=(((MaValue&0xf0)>>4)&0x0f);
disbuf[3]=MaValue&0x0f;
LedDisp();
}
}
void interr_ir(void) interrupt 0
{
/**
* 用户码和机器码
*/
unsigned char addrl,addrh,num1,num2;
EA = 0; //先关闭外部中断0
Delay_9000us(); // 检测9ms开始码
if (IRIN) { // 检测是否为干扰信号
EA = 1; // 重新开启外部中断0
return ; // 退出解码
}
while(!IRIN); // 等待跳为高电平
Delay_4500us(); // 检测4.5ms结果码
if (IRIN) { // 检测是否为干扰信号
EA = 1; // 重新开启外部中断0
return ; // 退出解码
}
// 读码
addrl=GetCode(); // 用户编码高位
addrh=GetCode(); // 用户编码低位
num1=GetCode(); // 机器码
num2=GetCode(); // 机器码反码
//校验是否为错码
if(num1!=~num2)
{
KeyValue=14;
EA=1;
return;
}
KeyValue=num2;
MaValue=addrh;
EA=1;
}
代码分析(只分析关键部位):
1. 系统初始化SystemInit()
系统初始化时,我们设置IRIN为高电平,同时把IT0设置成1,即下降沿(负跳变)触发中断。这是用于接收波形的引导码是从低电平开始的(如上面接收波形所示)。这样,当按下按键时,红外接收到信号,IRIN则发生从预先设置的高电平跳为低电平,从而产生中断。
2. 解码--中断程序
interr_ir(void)
首先,第一步把EX0关中断,这步至关重要,因为一个接收波形许多的下降沿,这样会产生干扰中断。
接下来,使用定期时0延时9ms,跳过开始码。注意,延时后,需要检测一下干扰信号。
下一步,while(!IRIN); 等待4.5ms高电平的到来,再延时4.5ms,跳过结果。
引导码过后,
开始读码,执行GetCode():
32位数据码,分4次读取,所以执行4次GetCode(),读取一个字节数据过程如下:
unsigned char GetCode()
{
unsigned char n;
static temp = 0;
for( n = 0; n < 8; n++ )
{
while(!IRIN); // 等待高电平,开始解码
Delay_840us(); // 延时0.84ms
if(IRIN) // 若仍然为高电平,则为1,否则为0
{
temp = (0x80|(temp>>1)); // 1
while(IRIN); //等待跳变成低电平
}
else {
temp=(0x00|(temp>>1)); // 0
}
}
return temp;
}
1. 从上述位定义看,位0和位1都是0.56ms的低电平过后,高电平开始延时。所以,读码的第一步while(!IRIN);是等待这个0.56ms的低电平之后的高电平。
2. 从高定平到后开始延时0.84ms
3. 判断0.84ms的波形高电平还是低电平。若仍然是高电平证明,该位为“1”,否则为“0”。
到这里读码结束。
3. 校验
由于32位数据码中,后两个字节是键数据码和健数据反码。可以通过这两个字节数来实行校验。即,把前一个字节去反判读是否等于后一字节。