S3C2410 I2C 总线驱动实例
1.S3C2410I2C控制器硬件描述
S3C2410处理器内部集成了一个I2C控制器,通过4个寄存器就可方便地对其进行控制,这4个寄存器如下。
1 IICCON:I2C控制寄存器。
2 IICSTAT:I2C状态寄存器。
3 IICDS:I2C收发数据移位寄存器。
4 IICADD:I2C地址寄存器。
S3C2410处理器内部集成的I2C控制器可支持主、从两种模式,我们主要使用其主模式。通过对IICCON、IICDS和IICADD寄存器的操作,可在I2C总线上产生开始位、停止位、数据和地址,而传输的状态则通过IICSTAT寄存器获取。
2.S3C2410I2C总线驱动总体分析
S3C2410的I2C总线驱动设计主要要完成以下工作。
1 设计对应于i2c_adapter_xxx_init()模板的S3C2410的模块加载函数和对应于i2c_adapter_xxx_exit()函数模板的模块卸载函数。
2设计对应于i2c_adapter_xxx_xfer()模板的S3C2410适配器的通信方法函数。针对S3C2410, functionality()函数 只需 简单 地返 回I2C_FUNC_I2C|I2C_FUNC_SMBUS_EMUL | I2C_FUNC_PROTOCOL_MANGLING表明其支持的功能。内核 源代 码中 的/drivers/i2c/busses/i2c-s3c2410.c
图1给出了S3C2410驱动中的主要函数与模板函数的对应关系,由于实现通信方法的方式不一样,模板的一个函数可能对应与S3C2410I2C总线驱动的多个函数。
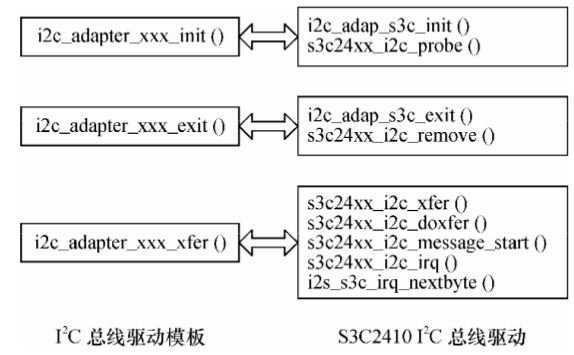
图1 I2C总线驱动模板与S3C2410I2C总线驱动的映射
3.S3C2410I2C适配器驱动的模块加载与卸载
I2C适配器驱动被作为一个单独的模块加载进内核,在模块的加载和卸载函数中,只需注册和注销一个platform_driver结构体,如代码清单1.1所示。
代码清单1.1 S3C2410 I2C总线驱动的模块加载与卸载
static int _ _init i2c_adap_s3c_init(void)
{
int ret;
ret= platform_driver_register(&s3c2410_i2c_driver);
if(ret == 0)
{
ret= platform_driver_register(&s3c2440_i2c_driver);
if(ret)
platform_driver_unregister(&s3c2410_i2c_driver);
}
return ret;
}
static void _ _exit i2c_adap_s3c_exit(void)
{
platform_driver_unregister(&s3c2410_i2c_driver);
platform_driver_unregister(&s3c2440_i2c_driver);
}
module_init(i2c_adap_s3c_init);
module_exit(i2c_adap_s3c_exit);
platform_driver结构体包含了具体适配器的probe()函数、remove()函数、resume()
函数指针等信息,它需要被定义和赋值,如代码清单1.2所示。
代码清单1.2platform_driver结构体
staticstruct platform_driver s3c2410_i2c_driver = {
.probe=s3c24xx_i2c_probe,
.remove=s3c24xx_i2c_remove,
.resume=s3c24xx_i2c_resume,
.driver={
.owner=THIS_MODULE,
.name="s3c2410-i2c",
},
};
当通 过Linux内核 源代 码/drivers/base/platform.c文件 中定义platform_driver_unregister()函数注册platform_driver结构体时,
其中probe指针指向的
s3c24xx_i2c_probe()函数将被调用,以初始化适配器硬件,如代码清单1.3所示。
代码清单1.3 S3C2410 I2C总线驱动中的s3c24xx_i2c_probe函数
staticint s3c24xx_i2c_probe(struct platform_device *pdev)
{
structs3c24xx_i2c *i2c = &s3c24xx_i2c;
structresource *res;
intret;
/*使能I2C的时钟*/
i2c->dev= &pdev->dev;
i2c->clk= clk_get(&pdev->dev, "i2c");
if(IS_ERR(i2c->clk))
{
dev_err(&pdev->dev,"cannot get clock\n");
ret= -ENOENT;
gotoout;
}
clk_enable(i2c->clk);
/*映射寄存器*/
res= platform_get_resource(pdev, IORESOURCE_MEM, 0);
if(res == NULL)
{
dev_err(&pdev->dev,"cannot find IO resource\n");
ret= -ENOENT;
gotoout;
}
i2c->ioarea
=
request_mem_region(res->start,
(res->end-res->start)+1,
pdev->name);
if(i2c->ioarea == NULL)
{
dev_err(&pdev->dev,"cannot request IO\n");
ret= -ENXIO;
gotoout;
}
i2c->regs= ioremap(res->start, (res->end-res->start)+1);
if(i2c->regs == NULL)
{
dev_err(&pdev->dev,"cannot map IO\n");
ret= -ENXIO;
gotoout;
}
/*设置I2C的信息块*/
i2c->adap.algo_data= i2c;
i2c->adap.dev.parent= &pdev->dev;
/*初始化I2C控制器*/
ret= s3c24xx_i2c_init(i2c);
if(ret != 0)
goto out;
/*申请中断*/
res= platform_get_resource(pdev, IORESOURCE_IRQ, 0);
if(res == NULL)
{
ret= -ENOENT;
gotoout;
}
ret= request_irq(res->start, s3c24xx_i2c_irq, SA_INTERRUPT,
pdev->name,i2c);
if(ret != 0)
{
gotoout;
}
i2c->irq= res;
ret= i2c_add_adapter(&i2c->adap); /*添加i2c_adapter*/
if(ret < 0)
{
gotoout;
}
platform_set_drvdata(pdev,i2c);
out:
if(ret < 0)
s3c24xx_i2c_free(i2c);
returnret;
}
上述代码中的主体工作是使能硬件并申请I2C适配器使用的I/O地址、
在这些工作都完成无误后,通过IC核心提供的i2c_add_adapter()函数添加这个适配
器。 因为S3C2410内部 集成I2C控制 器,可以 确定 I2C适配 器一 定存 在,
s3c24xx_i2c_probe()函数虽然命名“探测”
,但实际没有也不必进行任何探测工作,之
所以这样命名完全是一种设计习惯。
与s3c24xx_i2c_probe()函数完成相反功能的函数是s3c24xx_i2c_remove()函数,
它
在适 配器 模块 卸载 函数 调用platform_driver_unregister()函数 时所 示通 过
platform_driver的remove指针方式被调用。xxx_i2c_remove()的设计模板如代码清单
1.4所示。
代码清单1.4S3C2410 I2C总线驱动中的s3c24xx_i2c_remove函数
staticint s3c24xx_i2c_remove(struct platform_device *pdev)
{
structs3c24xx_i2c *i2c = platform_get_drvdata(pdev);
if(i2c != NULL)
{
s3c24xx_i2c_free(i2c);
platform_set_drvdata(pdev,NULL);
}
return 0;
}
代码清单1.3和代码清单1.4中用到的s3c24xx_i2c结构体进行适配器所有信
息的封装,类似于私有信息结构体,它与xxx_i2c结构体模板
对应。代码清单1.5所示s3c24xx_i2c结构体的定义,以及驱动模块定义的一个
s3c24xx_i2c结构体全局实例。
xxx_i2c结构体模板
structxxx_i2c
{
spinlock_t
lock;
wait_queue_head_twait;
structi2c_msg *msg;
unsignedint
msg_num;
unsignedint
msg_idx;
unsignedint
msg_ptr;
...
structi2c_adapter adap;
};
代码清单1.5s3c24xx_i2c结构体
structs3c24xxx_i2c
{
spinlock_t
lock;
wait_queue_head_twait;
structi2c_msg *msg;
unsignedint
msg_num;
unsignedint
msg_idx;
unsignedint
msg_ptr;
enums3c24xx_i2c_state state;
void_ _iomem *regs;
structclk *clk;
structdevice *dev;
structresource *irq;
structresource *ioarea;
structi2c_adapter adap;
};
staticstruct s3c24xx_i2c s3c24xx_i2c = {
.lock= SPIN_LOCK_UNLOCKED, /*自旋锁未锁定*/
.wait= _ _WAIT_QUEUE_HEAD_INITIALIZER(s3c24xx_i2c.wait),/*等待
队列初始化*/
.adap
={
.name = "s3c2410-i2c",
.owner = THIS_MODULE,
.algo = &s3c24xx_i2c_algorithm,
.retries = 2,
.class= I2C_CLASS_HWMON,
},
};
4.S3C2410I2C总线通信方法
由代码清单1.5的.algo= &s3c24xx_i2c_algorithm行可以看出,I2C适配器对应的i2c_algorithm结构体实
例为s3c24xx_i2c_algorithm,代码清单1.6所示s3c24xx_i2c_algorithm的定义。
代码清单1.6S3C2410的i2c_algorithm结构体
staticstruct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer
=s3c24xx_i2c_xfer,
.functionality
=s3c24xx_i2c_func,
};
上述代码第1行指定了S3C2410I2C总线通信传输函数s3c24xx_i2c_xfer(),这个
函数非常关键,所有I2C总线上对设备的访问最终应该由它来完成,代码清单1.7
所示 为这 个重 要函 数以 及其 依赖 的s3c24xx_i2c_doxfer()函数 和
s3c24xx_i2c_message_start()函数的源代码。
代码清单1.7 S3C2410 I2C总线驱动的master_xfer函数
staticint s3c24xx_i2c_xfer(struct i2c_adapter *adap,
structi2c_msg *msgs, int num)
{
struct s3c24xx_i2c *i2c = (struct s3c24xx_i2c *)adap->algo_data;
intretry;
int ret;
//最多可以重试adap->retries次。
for (retry = 0; retry < adap->retries; retry++)
{
ret = s3c24xx_i2c_doxfer(i2c, msgs, num);
if(ret != -EAGAIN)
return ret;
udelay(100);
}
return-EREMOTEIO;
}
staticint s3c24xx_i2c_doxfer(struct s3c24xx_i2c *i2c, struct
i2c_msg*msgs, int num)
{
unsignedlong timeout;
intret;
ret= s3c24xx_i2c_set_master(i2c);
if(ret != 0) {
ret= -EAGAIN;
gotoout;
}
spin_lock_irq(&i2c->lock);
i2c->msg
=msgs;
i2c->msg_num= num;
i2c->msg_ptr= 0;
i2c->msg_idx= 0;
i2c->state
=STATE_START;
s3c24xx_i2c_enable_irq(i2c);
s3c24xx_i2c_message_start(i2c,msgs);
spin_unlock_irq(&i2c->lock);
timeout= wait_event_timeout(i2c->wait, i2c->msg_num == 0, HZ * 5);
ret= i2c->msg_idx;
if(timeout == 0)
dev_dbg(i2c->dev,"timeout\n");
elseif (ret != num)
dev_dbg(i2c->dev,"incomplete xfer (%d)\n", ret);
msleep(1);/*确保停止位已经被传递*/
out:
returnret;
}
staticvoid s3c24xx_i2c_message_start(struct s3c24xx_i2c *i2c,
structi2c_msg *msg)
{
unsignedint addr = (msg->addr & 0x7f) << 1;
unsignedlong stat;
unsignedlong iiccon;
stat= 0;
stat|= S3C2410_IICSTAT_TXRXEN;
if(msg->flags & I2C_M_RD)
{
stat|= S3C2410_IICSTAT_MASTER_RX;
addr|= 1;
}
else
stat|= S3C2410_IICSTAT_MASTER_TX;
if(msg->flags & I2C_M_REV_DIR_ADDR)
addr^= 1;
s3c24xx_i2c_enable_ack(i2c);/*如果要使能ACK,则使能*/
iiccon= readl(i2c->regs + S3C2410_IICCON);
writel(stat,i2c->regs + S3C2410_IICSTAT);
writeb(addr,i2c->regs + S3C2410_IICDS);
udelay(1);/*在发送新的开始位前延迟1位*/
writel(iiccon,i2c->regs + S3C2410_IICCON);
stat|= S3C2410_IICSTAT_START;
writel(stat,i2c->regs + S3C2410_IICSTAT);
}
s3c24xx_i2c_xfer()函数调用s3c24xx_i2c_doxfer()函数传输I2C消息,
s3c24xx_i2c_doxfer()首先将S3C2410的I2C适配器设置为I2C主设备,其后初始
化s3c24xx_i2c结构体,使能I2C中断,并调用s3c24xx_i2c_message_start()函数启动
I2C消息的传输。
s3c24xx_i2c_message_start()函数写S3C2410适配器对应的控制寄存器,向I2C从
设备传递开始位和从设备地址。
上述代码只是启动了I2C消息数组的传输周期,并没有完整实现下图中给出的
algorithmmaster_xfer流程。这个流程的完整实现需要借助I2C适配器上的中断来步步
推进。代码清单1.8所示为S3C2410I2C适配器中断处理函数以及其依赖的
i2s_s3c_irq_nextbyte()函数的源代码。
代码清单1.8S3C2410 I2C适配器中断处理函数
staticirqreturn_t s3c24xx_i2c_irq(int irqno, void *dev_id,
structpt_regs *regs)
{
structs3c24xx_i2c *i2c = dev_id;
unsignedlong status;
unsignedlong tmp;
status= readl(i2c->regs + S3C2410_IICSTAT);
if(status & S3C2410_IICSTAT_ARBITR)
{
...
}
if(i2c->state == STATE_IDLE)
{
tmp= readl(i2c->regs + S3C2410_IICCON);
tmp&= ~S3C2410_IICCON_IRQPEND;
writel(tmp,i2c->regs + S3C2410_IICCON);
gotoout;
}
i2s_s3c_irq_nextbyte(i2c,status);/*把传输工作进一步推进*/
out:
returnIRQ_HANDLED;
}
staticint i2s_s3c_irq_nextbyte(struct s3c24xx_i2c *i2c,
unsignedlong iicstat)
{
unsigned long tmp;
unsigned char byte;
int ret = 0;
switch (i2c->state)
{
case STATE_IDLE:
goto out;
break;
caseSTATE_STOP:
s3c24xx_i2c_disable_irq(i2c);
goto out_ack;
case STATE_START:
/*我们最近做的一件事是启动一个新I2C消息*/
if (iicstat & S3C2410_IICSTAT_LASTBIT &&
!(i2c->msg->flags& I2C_M_IGNORE_NAK))
{
/*没有收到ACK*/
s3c24xx_i2c_stop(i2c, -EREMOTEIO);
goto out_ack;
}
if (i2c->msg->flags & I2C_M_RD)
i2c->state = STATE_READ;
else
i2c->state = STATE_WRITE;
/*仅一条消息,而且长度为0(主要用于适配器探测),发送停止位*/
if (is_lastmsg(i2c) && i2c->msg->len == 0)
{
s3c24xx_i2c_stop(i2c, 0);
goto out_ack;
}
if(i2c->state == STATE_READ)
gotoprepare_read;
/*进入写状态*/
caseSTATE_WRITE:
retry_write:
if(!is_msgend(i2c))
{
byte= i2c->msg->buf[i2c->msg_ptr++];
writeb(byte,i2c->regs + S3C2410_IICDS);
}
elseif (!is_lastmsg(i2c))
{
/*推进到下一条消息*/
i2c->msg_ptr= 0;
i2c->msg_idx++;
i2c->msg++;
/*检查是否要为该消息产生开始位*/
if(i2c->msg->flags & I2C_M_NOSTART)
{
if(i2c->msg->flags & I2C_M_RD)
{
s3c24xx_i2c_stop(i2c,-EINVAL);
}
gotoretry_write;
}
else
{
/*发送新的开始位*/
s3c24xx_i2c_message_start(i2c, i2c->msg);
i2c->state = STATE_START;
}
}
else
{
s3c24xx_i2c_stop(i2c,0);/* send stop */
}
break;
caseSTATE_READ:
/*有一个字节可读,看是否还有消息要处理
*/
if(!(i2c->msg->flags & I2C_M_IGNORE_NAK) &&
!(is_msglast(i2c)&& is_lastmsg(i2c))) {
if (iicstat & S3C2410_IICSTAT_LASTBIT) {
dev_dbg(i2c->dev,"READ: No Ack\n");
s3c24xx_i2c_stop(i2c,-ECONNREFUSED);
gotoout_ack;
}
}
byte= readb(i2c->regs + S3C2410_IICDS);
i2c->msg->buf[i2c->msg_ptr++]= byte;
prepare_read:
if(is_msglast(i2c)) {/* last byte of buffer */
if(is_lastmsg(i2c))
s3c24xx_i2c_disable_ack(i2c);
}else if (is_msgend(i2c)) {
/*还有消息要处理吗?*/
if(is_lastmsg(i2c)) {
s3c24xx_i2c_stop(i2c,0);/* last message, send stop and
complete*/
}else {
/*推进到下一条消息*/
i2c->msg_ptr= 0;
i2c->msg_idx++;
i2c->msg++;
}
}
break;
}
/*irq清除*/
out_ack:
tmp= readl(i2c->regs + S3C2410_IICCON);
tmp&= ~S3C2410_IICCON_IRQPEND;
writel(tmp,i2c->regs + S3C2410_IICCON);
out:
returnret;
}
中断处理函数s3c24xx_i2c_irq()主要通过调用i2s_s3c_irq_nextbyte()函数进行传输
工作 的进 一步 推进 。i2s_s3c_irq_nextbyte()函数 通过 switch(i2c->state)语句 分成
i2c->state的不同状态进行处理,在每种状态下,先检查i2c->state的状态与硬件寄存
器应该处于的状态是否一致,如果不一致,则证明有误,直接返回。当I2C处于读状
态STATE_READ或写状态STATE_WRITE时,通过is_lastmsg()函数判断是否传输的
是最后一条I2C消息,
如果是,
则产生停止位,
否则通过i2c->msg_idx++、
i2c->msg++
推进到下一条消息。