【图像处理】基于OpenCV底层实现的图片旋转
image processing 系列
- 【图像处理】直方图匹配
- 【图像处理】高斯滤波、中值滤波、均值滤波
图片旋转,本质上是对旋转后的图片中每个像素点计算在原图的位置。然后照搬过来就好。
(多说一句,如果计算出来在原图中的位置不是整数而是小数,因为像素点个数都是整数,就需要小数到整数的转换。这个转换过程是有讲究的,需要用到插值:最近邻插值、双线性插值等等。这里我使用的是最简单的最近邻插值,即对小数四舍五入成整数,C/C++ 实现四舍五入见这里)
完整 github 代码:image-processing (里面同时包含OSTU / 大津算法、直方图均衡化、滤波器等算法,还包括两种测试图片)。
图形图像课上一般会介绍旋转变换矩阵,其中 t 为需要旋转的角度,[x'; y']是变换后坐标(其中分号表示上下关系):
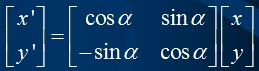
即表示为:[x'; y'] = [cos(t) sin(t); -sin(t) cos(t)][x; y]
因为我个人兴趣爱好(放P就是老师逼的。。。),不允许使用 OpenCV 封装好的旋转函数。只能自己实现,我开始的想法是:先求变换矩阵逆矩阵,然后将一张全黑图中每个点一一对应插值到原图中。
结果发现转换后图片全黑了……
后来发现原点设置不对。用OpenCV中的Mat格式存储(或二维数组)的图片,原点在左上角。但是想要实现的旋转原点在图片中心。
同时,Mat格式存储(或二维数组)的坐标系中y轴正方向向下。这样人类视觉上的顺时针旋转,在二维数组的坐标系中是逆时针旋转。
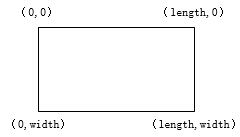
最重要的一点,也是二维数组操作中极易忽略的一点:数组操作的是数组下标,不是坐标系(数组的行数rows是矩形的宽width,列数cols是矩形的长length)。比如坐标系(此时为了更贴近数组布局,我们假设 y 轴坐标系是向下的)中,矩形顶点是:
但是在数组中,因为是行优先,所以四个点的下标取值为:
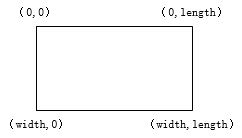
有没有发现,两种坐标是相反的!
总结下来,我们的图片旋转需要注意以下几点:
- 变换后图片中的每个像素点(i; j),需要平移到相对旋转中心的新坐标,即(i - Mat.rows/2; j - Mat.cols/2)。计算完成之后,需要再次还原到相对左上角原点的旧坐标;
- 本来需要 变换后图片 乘以 原图变换矩阵的逆矩阵 对应到原图中坐标。但是因为y轴方向向下,所以 变换后图片 乘以原图变换矩阵(无需逆矩阵) 即可对应到原图中坐标(顺时针旋转50度,还原操作是逆时针旋转50度);
- 矩阵下标与原图变换矩阵相乘之前,需要将矩阵下标两值互换。相乘之后,需要再次互换下标值还原成矩阵下标。
因此对于一个经过旋转 t 度之后数组下标为[m‘, n’]的像素值,还原成原图中的数组下标[m; n]计算为:
[cos(t) -sin(t); sin(t) cos(t)] ([m'; n'] - [Mat.rows/2; Mat.cols/2]) = [m; n] - [Mat.rows/2; Mat.cols/2]
源代码附上:
Mat nearestNeighRotate(cv::Mat img, float angle)
{
int len = (int)(sqrtf(pow(img.rows, 2) + pow(img.cols, 2)) + 0.5);
Mat retMat = Mat::zeros(len, len, CV_8UC3);
float anglePI = angle * CV_PI / 180;
int xSm, ySm;
for(int i = 0; i < retMat.rows; i++)
for(int j = 0; j < retMat.cols; j++)
{
xSm = (int)((i-retMat.rows/2)*cos(anglePI) - (j-retMat.cols/2)*sin(anglePI) + 0.5);
ySm = (int)((i-retMat.rows/2)*sin(anglePI) + (j-retMat.cols/2)*cos(anglePI) + 0.5);
xSm += img.rows / 2;
ySm += img.cols / 2;
if(xSm >= img.rows || ySm >= img.cols || xSm <= 0 || ySm <= 0){
retMat.at<Vec3b>(i, j) = Vec3b(0, 0);
}
else{
retMat.at<Vec3b>(i, j) = img.at<Vec3b>(xSm, ySm);
}
}
return retMat;
}好,我们来测试看看:
int main()
{
Mat img = imread("../HelloWorld.png");
retImg = nearestNeighRotate(img, -20.f);
namedWindow("nearNeigh", CV_WINDOW_AUTOSIZE);
imshow("nearNeigh", retImg);
waitKey();
cvDestroyAllWindows();
return 0;
} 结果(旋转了20度)为