Cv照相机定标和三维重建
1 针孔相机模型和变形
2 照相机定标
2.1 ProjectPoints2
2.2 FindHomography
2.3 CalibrateCamera2
2.4 FindExtrinsicCameraParams2
2.5 Rodrigues2
2.6 Undistort2
2.7 InitUndistortMap
2.8 FindChessboardCorners
2.9 DrawChessBoardCorners
3 姿态估计
3.1 CreatePOSITObject
3.2 POSIT
3.3 ReleasePOSITObject
3.4 CalcImageHomography
4 对极几何(双视几何)
4.1 FindFundamentalMat
4.2 ComputeCorrespondEpilines
4.3 ConvertPointsHomogenious
1)针孔相机模型和变形
这一节里的函数都使用针孔摄像机模型,这就是说,一幅视图是通过透视变换将三维空间中的点投影到图像平面。投影公式如下:
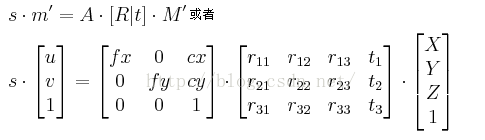
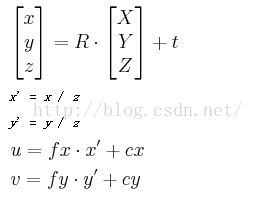
这里(X, Y, Z)是一个点的世界坐标,(u, v)是点投影在图像平面的坐标,以像素为单位。A被称作摄像机矩阵,或者内参数矩阵。(cx, cy)是基准点(通常在图像的中心),fx, fy是以像素为单位的焦距。所以如果因为某些因素对来自于摄像机的一幅图像升采样或者降采样,所有这些参数(fx, fy, cx和cy)都将被缩放(乘或者除)同样的尺度。内参数矩阵不依赖场景的视图,一旦计算出,可以被重复使用(只要焦距固定)。旋转-平移矩阵[R|t]被称作外参数矩阵,它用来描述相机相对于一个固定场景的运动,或者相反,物体围绕相机的的刚性运动。也就是[R|t]将点(X, Y, Z)的坐标变换到某个坐标系,这个坐标系相对于摄像机来说是固定不变的。上面的变换等价与下面的形式(z≠0):
真正的镜头通常有一些形变,主要的变形为径向形变,也会有轻微的切向形变。所以上面的模型可以扩展为:

k1和k2是径向形变系数,p1和p1是切向形变系数。OpenCV中没有考虑高阶系数。形变系数跟拍摄的场景无关,因此它们是内参数,而且与拍摄图像的分辨率无关。
后面的函数使用上面提到的模型来做如下事情:
1,给定内参数和外参数,投影三维点到图像平面。
2,给定内参数、几个三维点坐标和其对应的图像坐标,来计算外参数。
3,根据已知的定标模式,从几个角度(每个角度都有几个对应好的3D-2D点对)的照片来计算相机的外参数和内参数。
2)照相机定标
2.1)ProjectPoints2:投影三维点到图像平面
void cvProjectPoints2( const CvMat* object_points, const CvMat* rotation_vector,
const CvMat* translation_vector, const CvMat* intrinsic_matrix,
const CvMat* distortion_coeffs, CvMat* image_points,
CvMat* dpdrot=NULL, CvMat* dpdt=NULL, CvMat* dpdf=NULL,
CvMat* dpdc=NULL, CvMat* dpddist=NULL );
object_points
物体点的坐标,为3xN或者Nx3的矩阵,这儿N是视图中的所有所有点的数目。
rotation_vector
旋转向量,1x3或者3x1。
translation_vector
平移向量,1x3或者3x1。
intrinsic_matrix
摄像机内参数矩阵A:

distortion_coeffs
形变参数向量,4x1或者1x4,为[k1,k2,p1,p2]。如果是NULL,所有形变系数都设为0。
image_points
输出数组,存储图像点坐标。大小为2xN或者Nx2,这儿N是视图中的所有点的数目。
dpdrot
可选参数,关于旋转向量部分的图像上点的导数,Nx3矩阵。
dpdt
可选参数,关于平移向量部分的图像上点的导数,Nx3矩阵。
dpdf
可选参数,关于fx和fy的图像上点的导数,Nx2矩阵。
dpdc
可选参数,关于cx和cy的图像上点的导数,Nx2矩阵。
dpddist
可选参数,关于形变系数的图像上点的导数,Nx4矩阵。
函数cvProjectPoints2通过给定的内参数和外参数计算三维点投影到二维图像平面上的坐标。另外,这个函数可以计算关于投影参数的图像点偏导数的雅可比矩阵。雅可比矩阵可以用在cvCalibrateCamera2和cvFindExtrinsicCameraParams2函数的全局优化中。这个函数也可以用来计算内参数和外参数的反投影误差。 注意,将内参数和(或)外参数设置为特定值,这个函数可以用来计算外变换(或内变换)。
2.2)FindHomography:计算两个平面之间的透视变换
void cvFindHomography( const CvMat* src_points,
const CvMat* dst_points,
CvMat* homography );
src_points
原始平面的点坐标,大小为2xN,Nx2,3xN或者 Nx3矩阵(后两个表示齐次坐标),这儿N表示点的数目。
dst_points
目标平面的点坐标大小为2xN,Nx2,3xN或者 Nx3矩阵(后两个表示齐次坐标)。
homography
输出的3x3的homography矩阵。

这个函数可以用来计算初始的内参数和外参数矩阵。由于Homography矩阵的尺度可变,所以它被规一化使得h33 = 1
2.3)CalibrateCamera2:利用定标来计算摄像机的内参数和外参数
void cvCalibrateCamera2( const CvMat* object_points, const CvMat* image_points,
const CvMat* point_counts, CvSize image_size,
CvMat* intrinsic_matrix, CvMat* distortion_coeffs,
CvMat* rotation_vectors=NULL,
CvMat* translation_vectors=NULL,
int flags=0 );
object_points
定标点的世界坐标,为3xN或者Nx3的矩阵,这里N是所有视图中点的总数。
image_points
定标点的图像坐标,为2xN或者Nx2的矩阵,这里N是所有视图中点的总数。
point_counts
向量,指定不同视图里点的数目,1xM或者Mx1向量,M是视图数目。
image_size
图像大小,只用在初始化内参数时。
intrinsic_matrix
输出内参矩阵(A)
 ,如果指定CV_CALIB_USE_INTRINSIC_GUESS和(或)CV_CALIB_FIX_ASPECT_RATION,fx、 fy、 cx和cy部分或者全部必须被初始化。
,如果指定CV_CALIB_USE_INTRINSIC_GUESS和(或)CV_CALIB_FIX_ASPECT_RATION,fx、 fy、 cx和cy部分或者全部必须被初始化。
distortion_coeffs
输出大小为4x1或者1x4的向量,里面为形变参数[k1, k2, p1, p2]。
rotation_vectors
输出大小为3xM或者Mx3的矩阵,里面为旋转向量(旋转矩阵的紧凑表示方式,具体参考函数cvRodrigues2)
translation_vectors
输出大小为3xM或Mx3的矩阵,里面为平移向量。
flags
不同的标志,可以是0,或者下面值的组合:
CV_CALIB_USE_INTRINSIC_GUESS - 内参数矩阵包含fx,fy,cx和cy的初始值。否则,(cx, cy)被初始化到图像中心(这儿用到图像大小),焦距用最小平方差方式计算得到。注意,如果内部参数已知,没有必要使用这个函数,使用cvFindExtrinsicCameraParams2则可。
CV_CALIB_FIX_PRINCIPAL_POINT - 主点在全局优化过程中不变,一直在中心位置或者在其他指定的位置(当CV_CALIB_USE_INTRINSIC_GUESS设置的时候)。
CV_CALIB_FIX_ASPECT_RATIO - 优化过程中认为fx和fy中只有一个独立变量,保持比例fx/fy不变,fx/fy的值跟内参数矩阵初始化时的值一样。在这种情况下, (fx, fy)的实际初始值或者从输入内存矩阵中读取(当CV_CALIB_USE_INTRINSIC_GUESS被指定时),或者采用估计值(后者情况中fx和fy可能被设置为任意值,只有比值被使用)。
CV_CALIB_ZERO_TANGENT_DIST – 切向形变参数(p1, p2)被设置为0,其值在优化过程中保持为0。
函数cvCalibrateCamera2从每个视图中估计相机的内参数和外参数。3维物体上的点和它们对应的在每个视图的2维投影必须被指定。这些可以通过使用一个已知几何形状且具有容易检测的特征点的物体来实现。这样的一个物体被称作定标设备或者定标模式,OpenCV有内建的把棋盘当作定标设备方法(参考cvFindChessboardCorners)。目前,传入初始化的内参数(当CV_CALIB_USE_INTRINSIC_GUESS不被设置时)只支持平面定标设备(物体点的Z坐标必须为全0或者全1)。不过3维定标设备依然可以用在提供初始内参数矩阵情况。在内参数和外参数矩阵的初始值都计算出之后,它们会被优化用来减小反投影误差(图像上的实际坐标跟cvProjectPoints2计算出的图像坐标的差的平方和)。
2.4)FindExtrinsicCameraParams2:计算指定视图的摄像机外参数
void cvFindExtrinsicCameraParams2( const CvMat* object_points,
const CvMat* image_points,
const CvMat* intrinsic_matrix,
const CvMat* distortion_coeffs,
CvMat* rotation_vector,
CvMat* translation_vector );
object_points
定标点的坐标,为3xN或者Nx3的矩阵,这里N是视图中的个数。
image_points
定标点在图像内的坐标,为2xN或者Nx2的矩阵,这里N是视图中的个数。
intrinsic_matrix
内参矩阵(A)
。
distortion_coeffs
大小为4x1或者1x4的向量,里面为形变参数[k1,k2,p1,p2]。如果是NULL,所有的形变系数都为0。
rotation_vector
输出大小为3x1或者1x3的矩阵,里面为旋转向量(旋转矩阵的紧凑表示方式,具体参考函数cvRodrigues2)。
translation_vector
大小为3x1或1x3的矩阵,里面为平移向量。
函数cvFindExtrinsicCameraParams2使用已知的内参数和某个视图的外参数来估计相机的外参数。3维物体上的点坐标和相应的2维投影必须被指定。这个函数也可以用来最小化反投影误差。
2.5)Rodrigues2:进行旋转矩阵和旋转向量间的转换
int cvRodrigues2( const CvMat* src, CvMat* dst, CvMat* jacobian=0 );
src
输入的旋转向量(3x1或者1x3)或者旋转矩阵(3x3)。
dst
输出的旋转矩阵(3x3)或者旋转向量(3x1或者1x3)
jacobian
可选的输出雅可比矩阵(3x9或者9x3),关于输入部分的输出数组的偏导数。
函数转换旋转向量到旋转矩阵,或者相反。旋转向量是旋转矩阵的紧凑表示形式。旋转向量的方向是旋转轴,向量的长度是围绕旋转轴的旋转角。旋转矩阵R,与其对应的旋转向量r,通过下面公式转换:
旋转向量是只有3个自由度的旋转矩阵一个方便的表示,这种表示方式被用在函数cvFindExtrinsicCameraParams2和cvCalibrateCamera2内部的全局最优化中。
2.5)Undistort2:校正图像因相机镜头引起的变形
void cvUndistort2( const CvArr* src, CvArr* dst,
const CvMat* intrinsic_matrix,
const CvMat* distortion_coeffs );
src
原始图像(已经变形的图像)。只能变换32fC1的图像。
dst
结果图像(已经校正的图像)。
intrinsic_matrix
相机内参数矩阵,格式为
。
distortion_coeffs
四个变形系数组成的向量,大小为4x1或者1x4,格式为[k1,k2,p1,p2]。
函数cvUndistort2对图像进行变换来抵消径向和切向镜头变形。相机参数和变形参数可以通过函数cvCalibrateCamera2取得。使用本节开始时提到的公式,对每个输出图像像素计算其在输入图像中的位置,然后输出图像的像素值通过双线性插值来计算。如果图像得分辨率跟定标时用得图像分辨率不一样,fx、fy、cx和cy需要相应调整,因为形变并没有变化。
2.6)InitUndistortMap:计算形变和非形变图像的对应(map)
void cvInitUndistortMap( const CvMat* intrinsic_matrix,
const CvMat* distortion_coeffs,
CvArr* mapx, CvArr* mapy );
intrinsic_matrix
摄像机内参数矩阵(A) [fx 0 cx; 0 fy cy; 0 0 1].
distortion_coeffs
形变系数向量[k1, k2, p1, p2],大小为4x1或者1x4。
mapx
x坐标的对应矩阵。
mapy
y坐标的对应矩阵。
函数cvInitUndistortMap预先计算非形变对应-正确图像的每个像素在形变图像里的坐标。这个对应可以传递给cvRemap函数(跟输入和输出图像一起)。
2.7)InitUndistortMap:计算形变和非形变图像的对应(map)
void cvInitUndistortMap( const CvMat* intrinsic_matrix,
const CvMat* distortion_coeffs,
CvArr* mapx, CvArr* mapy );
intrinsic_matrix
摄像机内参数矩阵(A) [fx 0 cx; 0 fy cy; 0 0 1].
distortion_coeffs
形变系数向量[k1, k2, p1, p2],大小为4x1或者1x4。
mapx
x坐标的对应矩阵。
mapy
y坐标的对应矩阵。
函数cvInitUndistortMap预先计算非形变对应-正确图像的每个像素在形变图像里的坐标。这个对应可以传递给cvRemap函数(跟输入和输出图像一起)。
2.8)FindChessboardCorners:寻找棋盘图的内角点位置
int cvFindChessboardCorners( const void* image, CvSize pattern_size,
CvPoint2D32f* corners, int* corner_count=NULL,
int flags=CV_CALIB_CB_ADAPTIVE_THRESH );
image
输入的棋盘图,必须是8位的灰度或者彩色图像。
pattern_size
棋盘图中每行和每列角点的个数。
corners
检测到的角点
corner_count
输出,角点的个数。如果不是NULL,函数将检测到的角点的个数存储于此变量。
flags
各种操作标志,可以是0或者下面值的组合:
CV_CALIB_CB_ADAPTIVE_THRESH - 使用自适应阈值(通过平均图像亮度计算得到)将图像转换为黑白图,而不是一个固定的阈值。
CV_CALIB_CB_NORMALIZE_IMAGE - 在利用固定阈值或者自适应的阈值进行二值化之前,先使用cvNormalizeHist来均衡化图像亮度。
CV_CALIB_CB_FILTER_QUADS - 使用其他的准则(如轮廓面积,周长,方形形状)来去除在轮廓检测阶段检测到的错误方块。
函数cvFindChessboardCorners试图确定输入图像是否是棋盘模式,并确定角点的位置。如果所有角点都被检测到且它们都被以一定顺序排布(一行一行地,每行从左到右),函数返回非零值,否则在函数不能发现所有角点或者记录它们地情况下,函数返回0。例如一个正常地棋盘图右8x8个方块和7x7个内角点,内角点是黑色方块相互联通地位置。这个函数检测到地坐标只是一个大约地值,如果要精确地确定它们的位置,可以使用函数cvFindCornerSubPix。
2.9)DrawChessBoardCorners:绘制检测到的棋盘角点
void cvDrawChessboardCorners( CvArr* image, CvSize pattern_size,
CvPoint2D32f* corners, int count,
int pattern_was_found );
image
结果图像,必须是8位彩色图像。
pattern_size
每行和每列地内角点数目。
corners
检测到地角点数组。
count
角点数目。
pattern_was_found
指示完整地棋盘被发现(≠0)还是没有发现(=0)。可以传输cvFindChessboardCorners函数的返回值。
当棋盘没有完全检测出时,函数cvDrawChessboardCorners以红色圆圈绘制检测到的棋盘角点;如果整个棋盘都检测到,则用直线连接所有的角点。
(未完待续)