拉格朗日乘子法和KKT条件
转自:http://www.cnblogs.com/zhangchaoyang/articles/2726873.html
拉格朗日乘子法(Lagrange Multiplier)和KKT(Karush-Kuhn-Tucker)条件是求解约束优化问题的重要方法,在有等式约束时使用拉格朗日乘子法,在有不等约束时使用KKT条件。前提是:只有当目标函数为凸函数时,使用这两种方法才保证求得的是最优解。
对于无约束最优化问题,有很多经典的求解方法,参见无约束最优化方法。
拉格朗日乘子法
先来看拉格朗日乘子法是什么,再讲为什么。
minf(x)s.t.hi(x)=0i=1,2...,n
这个问题转换为
其中 λi≠0 ,称为拉格朗日乘子。
下面看一下wikipedia上是如何解释拉格朗日乘子法的合理性的。
现有一个二维的优化问题:
minf(x,y)s.t.g(x,y)=c
我们可以画图来辅助思考。
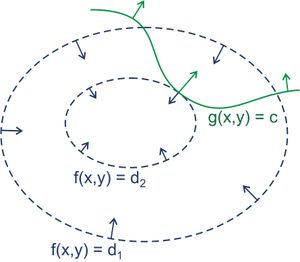
绿线标出的是约束 g(x,y)=c 的点的轨迹。蓝线是 f(x,y) 的等高线。箭头表示斜率,和等高线的法线平行。
从图上可以直观地看到在最优解处,f和g的斜率平行。
▽[f(x,y)+λ(g(x,y)−1)]=0λ≠0
一旦求出 λ 的值,将其套入下式,易求在无约束极值和极值所对应的点。
F(x,y)=f(x,y)+λ(g(x,y)−c)
新方程 F(x,y) 在达到极值时与 f(x,y) 相等,因为 F(x,y) 达到极值时 g(x,y)−c 总等于零。
(1) 取得极小值时其导数为0,即 ▽f(x)+▽∑ni=1λihi(x)=0 ,也就是说 f(x) 和 h(x) 的梯度共线。
KKT条件
先看KKT条件是什么,再讲为什么。
letL(x,μ)=f(x)+∑qk=1μkgk(x)
其中 μk≥0,gk(x)≤0
∵μk≥0gk(x)≤0} => μg(x)≤0
∴
∴
maxμminxL(x,μ)=maxμ[minxf(x)+minxμg(x)]=maxμminxf(x)+maxμminxμg(x)=minxf(x)+maxμminxμg(x)
又 ∵μk≥0gk(x)≤0} => minxμg(x)={0−∞ifμ=0org(x)=0ifμ>0andg(x)<0
∴maxμminxμg(x)=0 此时 μ=0org(x)=0
联合 (3) , (4) 我们得到 minxmaxμL(x,μ)=maxμminxL(x,μ)
亦即 L(x,μ)=f(x)+∑qk=1μkgk(x)μk≥0gk(x)≤0⎫⎭⎬⎪⎪ => minxmaxμL(x,μ)=maxμminxL(x,μ)=minxf(x)
我们把 maxμminxL(x,μ) 称为原问题 minxmaxμL(x,μ) 的对偶问题,上式表明当满足一定条件时原问题、对偶的解、以及 minxf(x) 是相同的,且在最优解 x∗ 处 μ=0org(x∗)=0 。把 x∗ 代入 (2) 得 maxμL(x∗,μ)=f(x∗) ,由 (4) 得 maxμminxL(x,μ)=f(x∗) ,所以 L(x∗,μ)=minxL(x,μ) ,这说明 x∗ 也是 L(x,μ) 的极值点,即 ∂L(x,μ)∂x|x=x∗=0 。
最后总结一下:
L(x,μ)=f(x)+∑qk=1μkgk(x)μk≥0gk(x)≤0⎫⎭⎬⎪⎪ => ⎧⎩⎨⎪⎪⎪⎪minxmaxμL(x,μ)=maxμminxL(x,μ)=minxf(x)=f(x∗)μkgk(x∗)=0∂L(x,μ)∂x|x=x∗=0
KKT条件是拉格朗日乘子法的泛化,如果我们把等式约束和不等式约束一并纳入进来则表现为:
L(x,λ,μ)=f(x)+∑ni=1λihi(x)+∑qk=1μkgk(x)λi≠0hi(x)=0μk≥0gk(x)≤0⎫⎭⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪ => ⎧⎩⎨⎪⎪⎪⎪minxmaxμL(x,λ,μ)=maxμminxL(x,λ,μ)=minxf(x)=f(x∗)μkgk(x∗)=0∂L(x,λ,μ)∂x|x=x∗=0
注: x,λ,μ 都是向量。
∂L(x,λ,μ)∂x|x=x∗=0 表明 f(x) 在极值点 x∗ 处的梯度是各个 hi(x∗) 和 gk(x∗) 梯度的线性组合。