视觉SLAM漫谈 (三): 研究点介绍
1. 前言
读者朋友们大家好!(很久很久)之前,我们为大家介绍了SLAM的基本概念和方法。相信大家对SLAM,应该有了基本的认识。在忙完一堆写论文、博士开题的事情之后,我准备回来继续填坑:为大家介绍SLAM研究的方方面面。如果前两篇文章算是"初识",接下来几篇就是"渐入佳境"了。在第三篇中,我们要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要。然后,我们再就各个小问题,讲讲经典的算法与分类。我有耐心讲,你是否有耐心听呢?
在《SLAM for Dummy》中,有一句话说的好:"SLAM并不是一种算法,而是一个概念。(SLAM is more like a concept than a single algorithm.)"所以,你可以和导师、师兄弟(以及师妹,如果有的话)说你在研究SLAM,但是,作为同行,我可能更关心:你在研究SLAM中的哪一个问题。有些研究者专注于实现一个具体的SLAM系统,而更多的人则是在研究SLAM里某些方法的改进。做应用和做理论的人往往彼此看不起,不过二者对科研都是有贡献的。作为研究生,我还是建议各位抓住SLAM中一个小问题,看看能否对现有的算法进行改进或者比较。不要觉得这种事情肤浅,它是对研究有实际帮助和意义的。同时,我也有一些朋友,做了一个基于滤波器/图优化的SLAM实现。程序是跑起来了,但他/她不知道自己有哪些贡献,钻研了哪个问题,写论文的时候就很头疼。所以,作为研究生,我建议你选择SLAM中的一个问题,改进其中的算法,而不是先找一堆程序跑起来再说。
那么问题来了:SLAM方面究竟有哪些可以研究的地方呢?我为大家上一个脑图。
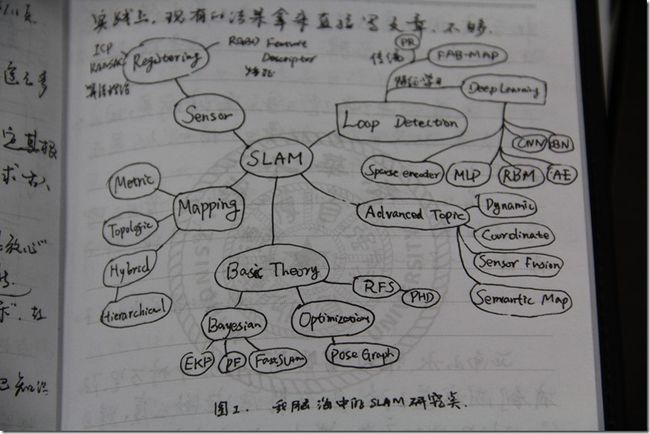
这个图是从我笔记本上拍下来的(请勿吐槽字和对焦)。可以看到,以SLAM为中心,有五个圈连接到它。我称它为Basic Theory(基础理论)、Sensor(传感器)、Mapping(建图)、Loop Detection(回环检测)、Advanced Topic(高级问题)。这可以说是SLAM的研究方向。下面我们"花开五朵,各表一枝"。
2. 基本理论
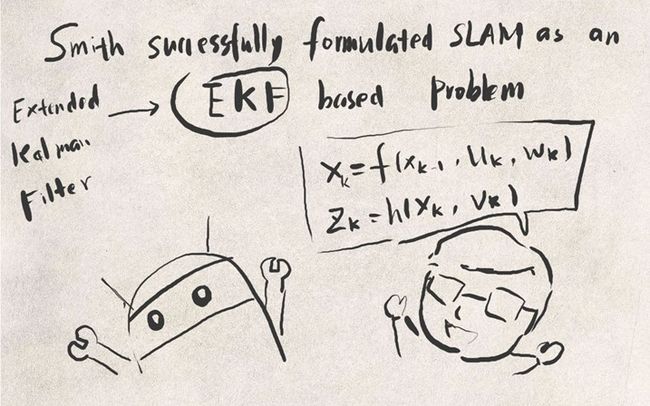
SLAM的基本理论,是指它的数学建模。也就是你如何用数学模型来表达这个问题。为什么说它"基本"呢?因为数学模型影响着整个系统的性能,决定了其他问题的处理方法。在早先的研究中(86年提出[1]至21世纪前期[2]),是使用卡尔曼滤波器的数学模型的。那里的机器人,就是一个位姿的时间序列;而地图,就是一堆路标点的集合。什么是路标点的集合?就是用(x,y,z)表示每一个路标,然后在滤波器更新的过程中,让这三个数慢慢收敛。
那么,请问这样的模型好不好?
好处是可以直接套用滤波器的求解方法。卡尔曼滤波器是很成熟的理论,比较靠谱。
缺点呢?首先,滤波器有什么缺点,基于它的SLAM就有什么缺点。所以EKF的线性化假设啊,必须存储协方差矩阵带来的资源消耗啊,都成了缺点(之后的文章里会介绍)。然后呢,最直观的就是,用(x,y,z)表示路标?万一路标变了怎么办?平时我们不就把屋里的桌子椅子挪来挪去的吗?那时候滤波器就挂了。所以啊,它也不适用于动态的场合。
这种局限性就是数学模型本身带来的,和其他的算法无关。如果你希望在动态环境中跑SLAM,就要使用其他模型或改进现有的模型了。
SLAM的基本理论,向来分为滤波器和优化方法两类。滤波器有扩展卡尔曼滤波(EKF)、粒子滤波(PF),FastSLAM等,较早出现。而优化方向用姿态图(Pose Graph),其思想在先前的文章中介绍过。近年来用优化的逐渐增多,而滤波器方面则在13年出现了基于Random Finite Set的方法[3],也是一个新兴的浪潮[4]。关于这些方法的详细内容,我们在今后的文章中再进行讨论。
作为SLAM的研究人员,应该对各种基本理论以及优缺点有一个大致的了解,尽管它们的实现可能非常复杂。
3. 传感器
传感器是机器人感知世界的方式。传感器的选择和安装方式,决定了观测方程的具体形式,也在很大程度上影响着SLAM问题的难度。早期的SLAM多使用激光传感器(Laser Range Finder),而现在则多使用视觉相机、深度相机、声呐(水下)以及传感器融合。我觉得该方向可供研究点有如下几个:
- 如何使用新兴传感器进行SLAM。 要知道传感器在不断发展,总有新式的东西会出来,所以这方面研究肯定不会断。
- 不同的安装方式对SLAM的影响。 举例来说,比如相机,顶视(看天花板)和下视(看地板)的SLAM问题要比平视容易很多。为什么容易呢?因为顶/下视的数据非常稳定,不像平视,要受各种东西的干扰。当然,你也可以研究其他的安装方式。
- 改进传统传感器的数据处理。 这部分就有些困难了,因为经常传感器已经有很多人在使用,你做的改进,未必比现有的成熟方法更好。
4. 建图
建图,顾名思议,就是如何画地图呗。其实,如果知道了机器人的真实轨迹,画地图是很简单的一件事。不过,地图的具体形式也是研究点之一。比如说常见的有以下几种:
- 路标地图。
地图由一堆路标点组成。EKF中的地图就是这样的。但是,也有人说,这真的是地图吗(这些零零碎碎的点都是什么啊喂)?所以路标图尽管很方便,但多数人对这种地图是不满意的,至少看上去不像个地图啊。于是就有了密集型地图(Dense map)。
- 度量地图(Metric map)
通常指2D/3D的网格地图,也就是大家经常见的那种黑白的/点云式地图。点云地图比较酷炫,很有种高科技的感觉。它的优点是精度比较高,比如2D地图可以用0-1表示某个点是否可通过,对导航很有用。缺点是相当吃存储空间,特别是3D,把所有空间点都存起来了,然而大多数角角落落里的点除了好看之外都没什么意义……

- 拓扑地图(Topological map)
拓扑地图是比度量地图更紧凑的一种地图。它将地图抽象为图论中的"点"和"边",使之更符合人类的思维。比如说我要去五道口,不知道路,去问别人。那人肯定不会说,你先往前走621米,向左拐94.2度,再走1035米……(这是疯子吧)。正常人肯定会说,往前走到第二个十字路口,左拐,走到下一个红绿灯,等等。这就是拓扑地图。
- 混合地图。
既然有人要分类,就肯定有人想把各类的好处揉到一起。这个就不多说了吧。
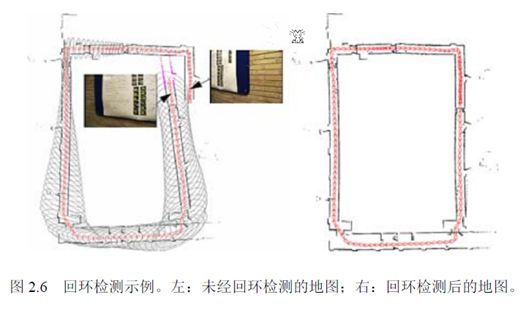
5. 回环检测
回环检测,又称闭环检测(Loop closure detection),是指机器人识别曾到达场景的能力。如果检测成功,可以显著地减小累积误差。
回环检测目前多采用词袋模型(Bag-of-Word),研究计算机视觉的同学肯定不会陌生。它实质上是一个检测观测数据相似性的问题。在词袋模型中,我们提取每张图像中的特征,把它们的特征向量(descriptor)进行聚类,建立类别数据库。比如说,眼睛、鼻子、耳朵、嘴等等(实际当中没那么高级,基本上是一些边缘和角)。假设有10000个类吧。然后,对于每一个图像,可以分析它含有数据库中哪几个类。以1表示有,以0表示没有。那么,这个图像就可用10000维的一个向量来表达。而不同的图像,只要比较它们的向量即可。
回环检测也可以建成一个模型识别问题,所以你也可以使用各种机器学习的方法来做,比如什么决策树/SVM,也可以试试Deep Learning。不过实际当中要求实时检测,没有那么多时间让你训练分类器。所以SLAM更侧重在线的学习方法。
6. 高级话题
前面的都是基础的SLAM,只有"定位"和"建图"两件事。这两件事在今天已经做的比较完善了。近几年的RGB-D SLAM[5], SVO[6], Kinect Fusion[7]等等,都已经做出了十分炫的效果。但是SLAM还未走进人们的实际生活。为什么呢?
因为实际环境往往非常复杂。灯光会变,太阳东升西落,不断的有人从门里面进进出出,并不是一间安安静静的空屋子,让一个机器人以2cm/s的速度慢慢逛。论文中看起来酷炫的算法,在实际环境中往往捉襟见肘,处处碰壁。向实际环境挑战,是SLAM技术的主要发展方向,也就是我们所说的高级话题。主要有:动态场景、语义地图、多机器人协作等等。
7. 小结
本文向大家介绍了SLAM中的各个研究点。我并不想把它写成综述,因为不一定有人愿意看一堆的参考文献,我更想把它写成小故事的形式。
最后,让我们想象一下未来SLAM的样子吧:
有一天,小萝卜被领进了一家新的实验楼。在短暂的自我介绍之后,他飞快地在楼里逛了一圈,记住了哪里是走廊,哪儿是房间。他刻意地观察各个房间特有的物品,以便区分这些看起来很相似的房间。然后,他回到了科学家身边,协助他的研究。有时,科学家会让他去各个屋里找人,找资料,有时,也带着他去认识新安装的仪器和设备。在闲着没事时,小萝卜也会在楼里逛逛,看看那些屋里都有什么变化。每当新的参观人员到来,小萝卜会给他们看楼里的平面图,向他们介绍各个楼层的方位与状况,为他们导航。大家都很喜欢小萝卜。而小萝卜明白,这一切,都是过去几十年里SLAM研究人员不断探索的结果。
References:
[1]. Smith, R.C. and P. Cheeseman, On the Representation and Estimation of Spatial Uncertainty. International Journal of Robotics Research, 1986. 5(4): p. 56--68.
[2]. Se, S., D. Lowe and J. Little, Mobile robot localization and mapping with uncertainty using scale-invariant visual landmarks. The international Journal of robotics Research, 2002. 21(8): p. 735--758.
[3]. Mullane, J., et al., A Random-Finite-Set Approach to Bayesian SLAM. IEEE Transactions on Robotics, 2011.
[4]. Adams, M., et al., SLAM Gets a PHD: New Concepts in Map Estimation. IEEE Robotics Automation Magazine, 2014. 21(2): p. 26--37.
[5]. Endres, F., et al., 3-D Mapping With an RGB-D Camera. IEEE Transactions on Robotics, 2014. 30(1): p. 177--187.
[6]. Forster, C., M. Pizzoli and D. Scaramuzza, SVO: Fast semi-direct monocular visual odometry. 2014, IEEE. p. 15--22.
[7]. Newcombe, R.A., et al., KinectFusion: Real-time dense surface mapping and tracking. 2011, IEEE. p. 127--136.
rviz显示地图
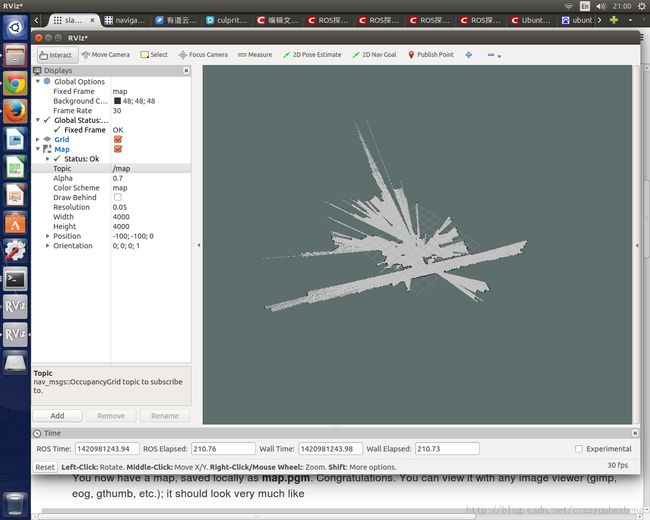
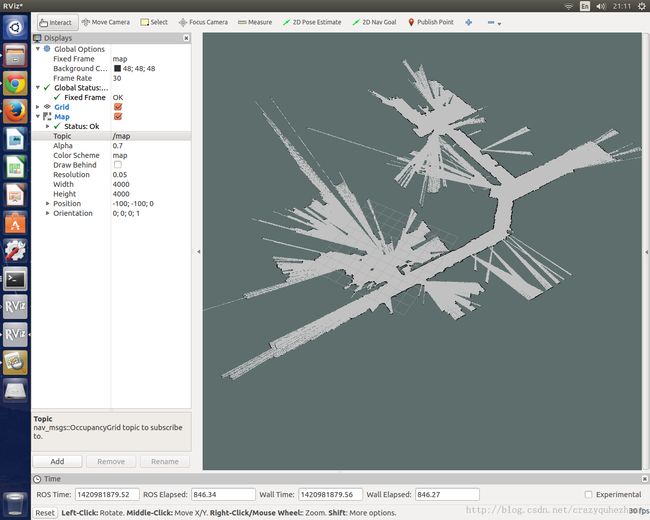
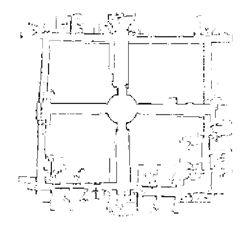
ROS提供了非常强大的图形化模拟环境 RViz,这个 RViz 能做的事情非常多。今天我们学习一下如何使用 RViz 对机器人在路径探索过程中对地图动态观测。我们将学习重放已经采集的数据来模拟机器人输入,从而将精力放到SLAM和地图的建立以及RViz的使用上。下面是效果图:

一 基本概念
ROS 对机器人导航提供了非常强大的支持,这可以让我们在不了解细节和海量复杂无比的科学计算的情况下就可以对机器人的导航,定位,路径规划。这其中第一步就是要建立一个封闭环境的地图,这个过程叫做SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建,或并发建图与定位。 SLAM最早由Smith、Self和Cheeseman于1988年提出。 由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。
二 ROS gmaping 工具
ROS 提供的gmaping包是用来生成地图的,它是对著名的开源OpenSlam包在ROS框架下的一个实现。这个包提供了对激光设备的Slam, 根据激光设备的输入和姿态数据从而建立一个基于网格的的2D地图(就像建立楼房设计的 平面图)。它需要从ROS系统监听许多Topic,并输出一个Topic --map (nav_msgs/OccupancyGrid),这也是RViz的输入Topic.
这个包需要单独下载 ,命令 : sudo apt-get install ros-indigo-slam-gmapping
三 硬件要求
本文提供的是模拟数据,所以没有任何硬件需要。
gmaping 需要使用实际的机器人获取激光或者深度数据。通常这些激光距离探测器价格比较昂贵,ROS推荐使用的 SCIP2.2, Hokuyo Model 04LX, 30LX ,SICK LMS2xx Lasers 价格都巨贵无比,而且尺寸都较大。ROS使用的廉价机器人TurtleBot使用的则是Kinnect价格在接近1000元,但这个不是我们今天的话题内容。
四 操作过程
-
启动ROS master. 这是所有ROS操作的第一步,就像开机一样
- roscore
-
配置ROS启用重放数据中的时间而非本机时间,影响整个系统所有时间API的输出结果。在默认情况下,ROS使用ubuntu系统的时间,也就是墙上时钟时间(wall clock)。但我们重播一个记录历史文件时,里面记录的是历史时间,所以我们需要告诉ROS从现在起开始启用模拟时间。
- rosparam set use_sim_time true
-
下载ROS提供的激光数据采集记录文件
- wget http://pr.willowgarage.com/data/gmapping/basic_localization_stage.bag
-
启动gmapping, 并监听 scan_base topic发来的消息。该topic是由模拟器发布的。
- rosrun gmapping slam_gmapping scan:=base_scan
-
启动模拟器重放激光数据
- rosbag play --clock basic_localization_stage.bag
-
启动RViz,点击 add 按钮(左下方) ,在弹出的列表中选择 map,点击OK,这时开始展现一个空的地图
- rosrun rviz rviz

-
最关键的一步,要告诉RViz 生成map信息的topic是什么。我们前面讲到过,gmapping输出的topic是 /map. 如下图配置,立即就可以看到地图的动态建立了
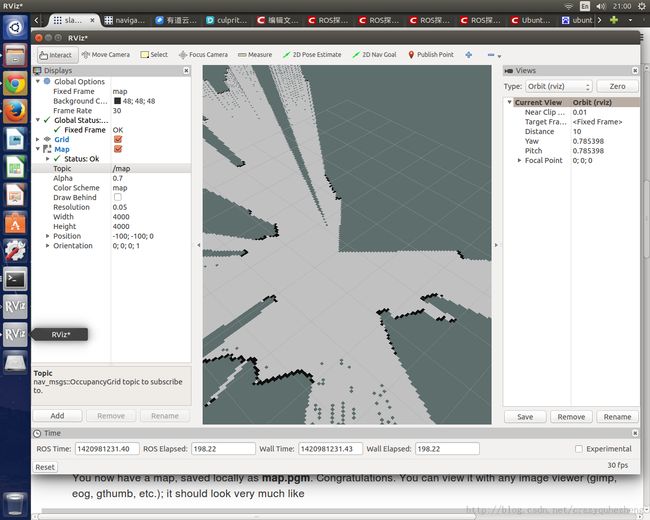
- 随着时间的推进,慢慢的整个地图就显示出来了