Accessing an OpenCV Mat Data using C++
Refer from http://blog.csdn.net/xiaowei_cqu/article/details/7771760
图像容器Mat
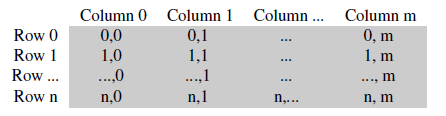

Mat m(7, 2, CV_8UC3);
cout << "width: " << m.cols << endl; // 2
cout << "m.elemSize():" << m.elemSize() << endl;// 3, channels * each element size in bytes( elemSize1( ))
cout << "m.elemSize1():" << m.elemSize1() << endl; // 1, each element size in bytes
cout << "m.step1():" << m.step1() << endl; // 6, (width of a single matrix row in bytes) / (element size in bytes)
Mat::depth
Returns the depth of a matrix element.
- C++: int Mat:: depth ( ) const
-
The method returns the identifier of the matrix element depth (the type of each individual channel). For example, for a 16-bit signed element array, the method returns CV_16S . A complete list of matrix types contains the following values:
- CV_8U - 8-bit unsigned integers ( 0..255 )
- CV_8S - 8-bit signed integers ( -128..127 )
- CV_16U - 16-bit unsigned integers ( 0..65535 )
- CV_16S - 16-bit signed integers ( -32768..32767 )
- CV_32S - 32-bit signed integers ( -2147483648..2147483647 )
- CV_32F - 32-bit floating-point numbers ( -FLT_MAX..FLT_MAX, INF, NAN )
- CV_64F - 64-bit floating-point numbers ( -DBL_MAX..DBL_MAX, INF, NAN )
访问图像中的像素
高效的方法:C操作符[ ]
- Mat& ScanImageAndReduceC(Mat& I, const uchar* const table)
- {
- // accept only char type matrices
- CV_Assert(I.depth() != sizeof(uchar));
- int channels = I.channels();
- int nRows = I.rows ;
- int nCols = I.cols* channels;
- if (I.isContinuous())
- {
- nCols *= nRows;
- nRows = 1;
- }
- int i,j;
- uchar* p;
- for( i = 0; i < nRows; ++i)
- {
- p = I.ptr<uchar>(i);
- for ( j = 0; j < nCols; ++j)
- {
- p[j] = table[p[j]];
- }
- }
- return I;
- }
- int nRows = I.rows * channels;
- int nCols = I.cols;
- uchar* p = I.data;
- for( unsigned int i =0; i < ncol*nrows; ++i)
- *p++ = table[*p];
安全的方法:迭代器iterator
相比用指针直接访问可能出现越界问题,迭代器绝对是非常安全的方法:- Mat& ScanImageAndReduceIterator(Mat& I, const uchar* const table)
- {
- // accept only char type matrices
- CV_Assert(I.depth() != sizeof(uchar));
- const int channels = I.channels();
- switch(channels)
- {
- case 1:
- {
- MatIterator_<uchar> it, end;
- for( it = I.begin<uchar>(), end = I.end<uchar>(); it != end; ++it)
- *it = table[*it];
- break;
- }
- case 3:
- {
- MatIterator_<Vec3b> it, end;
- for( it = I.begin<Vec3b>(), end = I.end<Vec3b>(); it != end; ++it)
- {
- (*it)[0] = table[(*it)[0]];
- (*it)[1] = table[(*it)[1]];
- (*it)[2] = table[(*it)[2]];
- }
- }
- }
- return I;
- }
这种方式虽然安全,但是挺慢的,一会儿就知道了。
更慢的方法:动态地址计算
- Mat& ScanImageAndReduceRandomAccess(Mat& I, const uchar* const table)
- {
- // accept only char type matrices
- CV_Assert(I.depth() != sizeof(uchar));
- const int channels = I.channels();
- switch(channels)
- {
- case 1:
- {
- for( int i = 0; i < I.rows; ++i)
- for( int j = 0; j < I.cols; ++j )
- I.at<uchar>(i,j) = table[I.at<uchar>(i,j)];
- break;
- }
- case 3:
- {
- Mat_<Vec3b> _I = I;
- for( int i = 0; i < I.rows; ++i)
- for( int j = 0; j < I.cols; ++j )
- {
- _I(i,j)[0] = table[_I(i,j)[0]];
- _I(i,j)[1] = table[_I(i,j)[1]];
- _I(i,j)[2] = table[_I(i,j)[2]];
- }
- I = _I;
- break;
- }
- }
- return I;
- }
减小颜色空间 color space reduction
0~9 范围的像素值为 0
10~19 范围的像素值 为 10
20~29 范围的像素值为 20
。。。。。。
着这样的操作将颜色取值降低为 26*26*26 种情况。这个操作可以用一个简单的公式:
在处理图像像素时,每个像素需要进行一遍上述计算也需要一定的时间花销。但我们注意到其实只有 0~255 种像素,即只有256种情况。进一步可以把256种计算好的结果提前存在表中 table 中,这样每种情况不需计算直接从 table 中取结果即可。
- int divideWith=10;
- uchar table[256];
- for (int i = 0; i < 256; ++i)
- table[i] = divideWith* (i/divideWith);
- p[j] = table[p[j]];
LUT : Look up table
OpenCV 很聪明的有个 LUT 函数就是针对这种 Look up talbe 的操作:- Mat lookUpTable(1, 256, CV_8U);
- uchar* p = lookUpTable.data;
- for( int i = 0; i < 256; ++i)
- p[i] = table[i];
- for (int i = 0; i < times; ++i)
- LUT(I, lookUpTable, J);
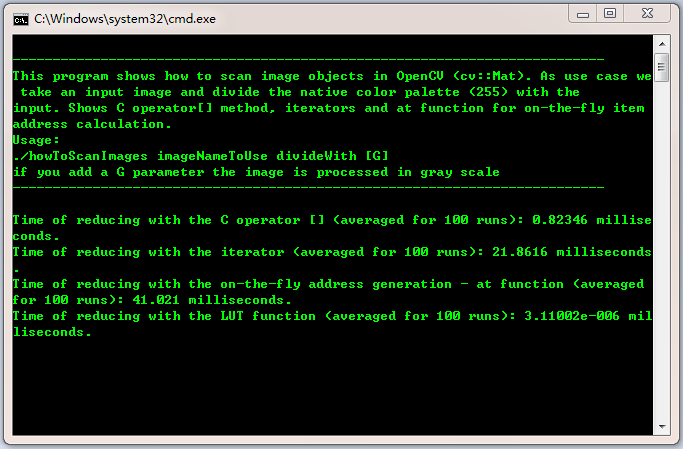
算法计时
- double t;
- t = (double)getTickCount();
- t = 1000*((double)getTickCount() - t)/getTickFrequency();
- t /= times;
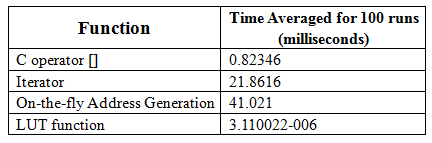
实验结果

转载请注明出处:http://blog.csdn.net/xiaowei_cqu/article/details/7771760
实验代码下载:http://download.csdn.net/detail/xiaowei_cqu/4443761
Refer from https://tolleybot.wordpress.com/2011/05/14/accessing-an-opencv-mat-data-using-c/
The new C++ interface to OpenCV is a great addition to the very popular computer vision library. For the most part the learning curve is not step, but I tend to find myself doing things in to many steps only to realize that there is already a function for that particular task.
One of the things I had some frustration with was accessing the new Mat classes data elements. The OpenCV documentation site (http://opencv.willowgarage.com/documentation/cpp/index.html) hosted at willowsgarage.com provides complete documentation of the Mat class. Its still a little unclear though exactly how to access elements in an efficient way, especially for multi-channel matrices.
I thought I would share a code bit that shows exactly how this is done.
1. int n = m_CurrentImage.channels();
2. // Get A pointer to the data
3. uchar* ptr = m_CurrentImage.data +m_CurrentImage.step*y;
4. // sample point in image
5. uchar Blue = ptr[n*x];
6. uchar Green = ptr[n*x+1];
7. uchar Red = ptr[n*x+2];
Variable Definitions:
- n – The number of channels in the matrix
- m_CurrentImage – The actual Mat class
- ptr – The pointer to the start location of the data of the Mat
- Blue – The blue value
- Green – The green value
- Red – The red value
- x – The col where we want to retrieve the data
- y – The row where we want to retrieve the data
The matrix in the code above is called m_CurrentImage, its a three channel matrix of unsigned char. Itsimportant to note that the code above would need to be changed to reflect the data type your Mat is using.
For example, to use a double type Mat, the code would be:
1. int n = m_CurrentImage.channels();
2. // Get A pointer to the data
3. double* ptr = (double*)m_CurrentImage.data +m_CurrentImage.step*y;
4. // sample point in image
5. double Blue = ptr[n*x];
6. double Green = ptr[n*x+1];
7. double Red = ptr[n*x+2];
From above the first thing we do is retrieve the number of channels in line 1. Line 3 contains the important step. Using n and y we find the start point for the location in memory where we wish to retrieve data. Once we have defined ptr we can then access the B, G, & R values of the matrix (or whatever you want to call them). We simply offset the ptr by x (the row) and the number of channels n.
This is a very easy way to access the data given any number of channels.
Hope this helps anyone getting a little frustrated at accessing data using the Mat class.