ROS进阶学习手记 2 -- RViz工具的学习1
ROS中提供了很多强大的功能,我们学习完前面的基本知识之后要继续进行深入。
1、认识rviz
rviz是ROS中一款强大的3D可视化工具,这个玩意在后面可是要频繁用到的,是必须要弄明白的,详细的教程可以参考wiki:http://wiki.ros.org/rviz/UserGuide
我们可以在里面创建自己的机器人,并且让机器人动起来。还可以创建地图,显示3D点云等等,总之,想在ROS中显示的东东都可以在这里显示出来。当然这些显示都是通过消息的订阅来完成的,机器人通过ROS发布数据,rviz订阅消息接收数据,然后显示,这些数据也是有一定的数据格式的,可以参考下面的链接:
http://wiki.ros.org/rviz/DisplayTypes
看到上面的机器人了吧,是不是很酷,在rviz中,这样的机器人模型是通过urdf文件描述的,具体urdf文件怎么写,参考wiki:
http://wiki.ros.org/urdf
================================
2. 开始RViz的学习
我是从这里开始:http://wiki.ros.org/rviz
在它之下,先玩这一部分:http://wiki.ros.org/rviz/UserGuide
3. RViz的安装和运行
目录
- Troubleshooting
- Install or build rviz
- Install from debian repository
- Build from source
- Startup
- Displays
- Adding a new display
- Display Properties
- Display Status
- Moving Displays
- Built-in Display Types
- Configurations
- 0.4 and above
- 0.3 and below
- Views Panel
- The different camera types
- Orbital Camera (default)
- FPS (first-person) Camera
- Top-down Orthographic
- Views
- The different camera types
- Coordinate Frames
- The Fixed Frame
- The Target Frame
- Tools
- Move Camera (Keyboard shortcut: m)
- Select (Keyboard shortcut: s)
- 2D Nav Goal (Keyboard shortcut: g)
- 2D Pose Estimate (Keyboard shortcut: p)
- Time
- Stereo
- Plugins
Troubleshooting
If you're running into problems and have not seen theanswer below, try theTroubleshooting Page
Install or build rviz
Obviously you don't need both and should prefer theinstall:
Install from debian repository
Until fuerte:
sudo apt-get installros-fuerte-visualization
From groovy on:
sudo apt-get install ros-groovy-rviz
# or
sudo apt-get install ros-hydro-rviz
# or
sudo apt-get install ros-indigo-rviz
Build from source
Download the rviz sources into your ros_workspace oryour overlay (help for fuerte,help for groovy).
First satisfy any system dependencies.
rosdep install rviz
Now build the visualizer:
rosmake rviz
Startup
You might have to run a line such as
source /opt/ros/indigo/setup.bash
roscore &
Then start the visualizer:
rosrun rviz rviz
When rviz starts for the first time, you will see anempty window:The big black thing is the 3D view (empty becausethere is nothing to see). On the left is the Displays list, which will show anydisplays you have loaded. Right now it just contains the global options and thetime view, which I'll get to later. On the right are some of the other panels,described below.
Displays
A display is something that draws something in the 3Dworld, and likely has some options available in the displays list. An exampleis a point cloud, the robot state, etc.
Adding a new display
To add a display, click the Add button at the bottom:
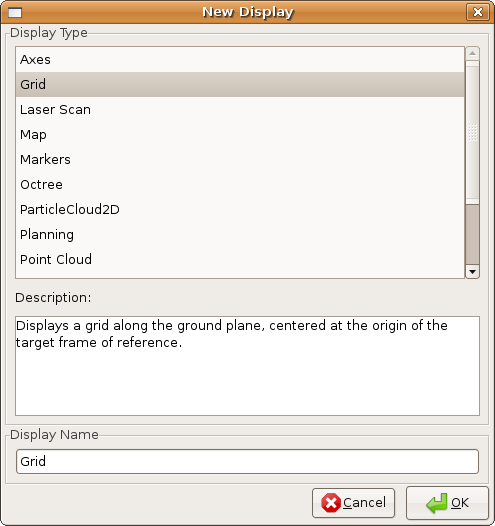
This will pop up the new display dialog:
更多请看百度文库: http://wenku.baidu.com/view/c4d2d96b9b89680203d825d2
这次主要用UserGuide这个资料介绍了Rviz这个simulator的UI界面分布,包括Display, View, Tool, Time,还有中间最大区域的3D显示引擎。