《OpenCV3编程入门》学习笔记八:图像轮廓与分割
一:内容介绍
本节主要介绍OpenCV的imgproc模块的图像轮廓与分割部分:
1. 查找并绘制轮廓
2. 寻找物体的凸包
3. 使用多边形将轮廓包围
4. 图像的矩
5. 分水岭算法
6. 图像修补
二:学习笔记
1. findContours()函数查找图像轮廓和canny检测边缘、hough检测直线,这些都非常使用(参见:OpenCV成长之路(8):直线、轮廓的提取与描述)。但是关于opencv中findContours()的具体原理我也没看,想深入研究的话可以看What is the algorithm that opencv uses for finding contours?
2. 寻找凸包和使用多边形将轮廓包围
3. 图像矩作为图像的一种统计特征,满足平移、伸缩、旋转的不变性(参见:图像的矩特征)。同时,矩本身也有一定的物理含义,特殊地,轮廓的m00矩代表轮廓的面积。
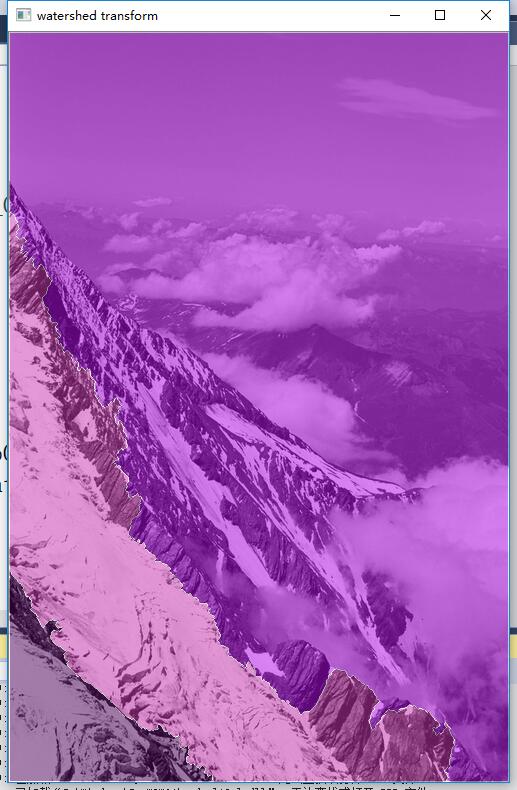
4. 分水岭算法可以将图像的边缘转换为“山脉”,将均匀区域转化为“山谷”,有助于图像分割。例程里边用的还有点复杂,得稍微理解一下。
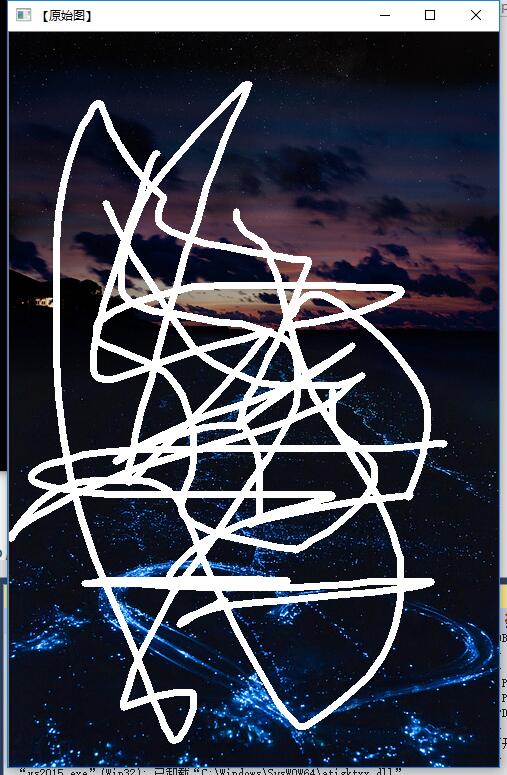
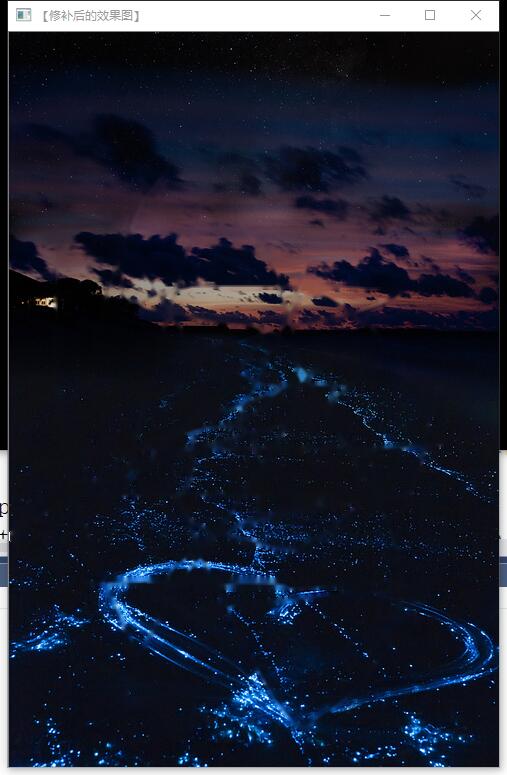
5. 图像修补,不怎么用感觉。
6. 关于contours官网给的很好的一份资料:Contour Features
6. 本节函数清单

三:相关源码及解析
本章示例较多,示例列表:
1.查找并绘制轮廓
2.寻找和绘制物体的凸包
3.使用多边形将包围轮廓
4.查找并绘制图像轮廓矩
5.分水岭算法
6.图像修补
1. 查找并绘制轮廓
源码:
#include素材:

效果图:
提示:
这二有一个官方samples里带的寻找轮廓的例子,更容易理解一点:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include 2 . 寻找和绘制物体的凸包
源码:
#include素材:
效果图:

提示:
无
3 . 使用多边形将包围轮廓
源码:
#include素材:

效果图:
提示:
无
4 . 查找并绘制图像轮廓矩
源码:
#include素材:

效果图:
提示:
无
5 . 分水岭算法
源码:
#include(i, j) = Vec3b(255, 255, 255);
else if (index <= 0 || index > compCount)
watershedImage.at(i, j) = Vec3b(0, 0, 0);
else
watershedImage.at(i, j) = colorTab[index - 1];
}
//混合灰度图和分水岭效果图并显示最终的窗口
watershedImage = watershedImage*0.5 + grayImage*0.5;
imshow("watershed transform", watershedImage);
}
}
return 0;
}
static void on_Mouse(int event, int x, int y, int flags, void*)
{
//处理鼠标不在窗口中的情况
if (x < 0 || x >= g_srcImage.cols || y < 0 || y >= g_srcImage.rows) return;
//处理鼠标左键相关消息
if (event == EVENT_LBUTTONUP || !(flags & EVENT_FLAG_LBUTTON)) //左键抬起动作或处于没有按下状态
prevPt = Point(-1, -1);
else if (event == EVENT_LBUTTONDOWN) //左键按下动作
prevPt = Point(x, y);
//鼠标左键按下并移动,绘制出白色线条
else if (event == EVENT_MOUSEMOVE && (flags & EVENT_FLAG_LBUTTON))
{
Point pt(x, y);
if (prevPt.x < 0) prevPt = pt;
line(g_maskImage, prevPt, pt, Scalar::all(255), 5);
line(g_srcImage, prevPt, pt, Scalar::all(255), 5);
prevPt = pt;
imshow(WINDOW_NAME, g_srcImage);
}
}
素材:

效果图:

提示:
无
6 . 图像修补
源码:
#include素材:

效果图:
提示:
无