《OpenCV3编程入门》学习笔记十:角点检测
一:内容介绍
本节主要介绍OpenCV的imgproc模块的角点检测(Feature Detection)部分:
1. Harris角点检测
2. Shi-Tomasi角点检测
3. 亚像素级角点检测
二:学习笔记
1. harris角点还是挺常见的,Harris角点 这篇文章介绍的比较好。
————————–补充于16/11/10————————————-
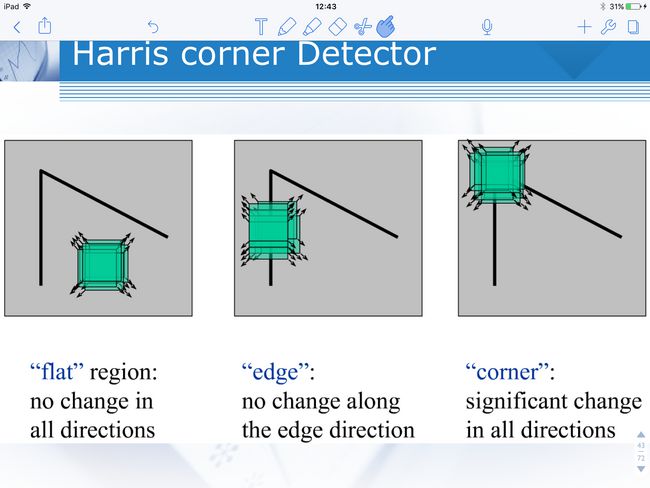
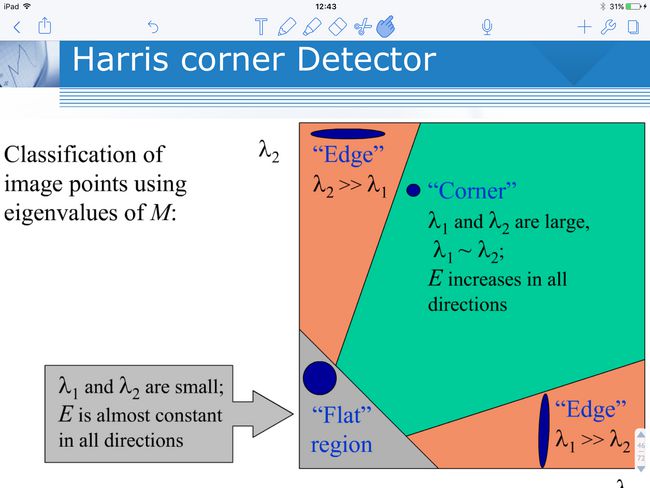
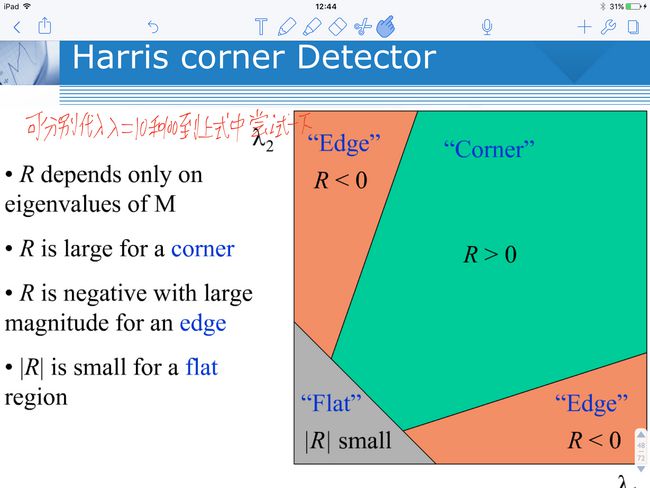
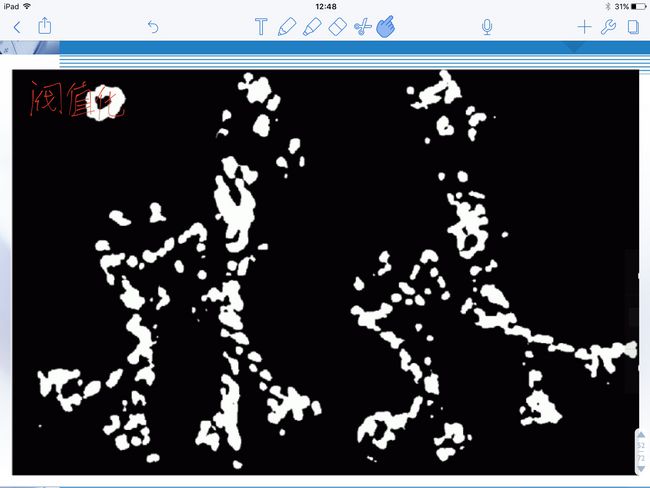
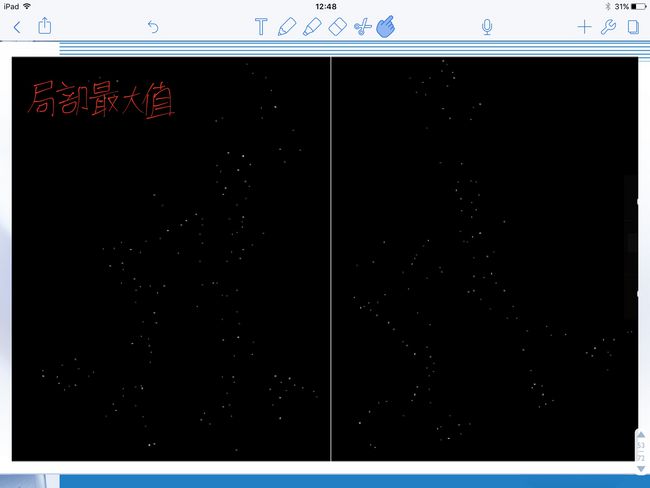
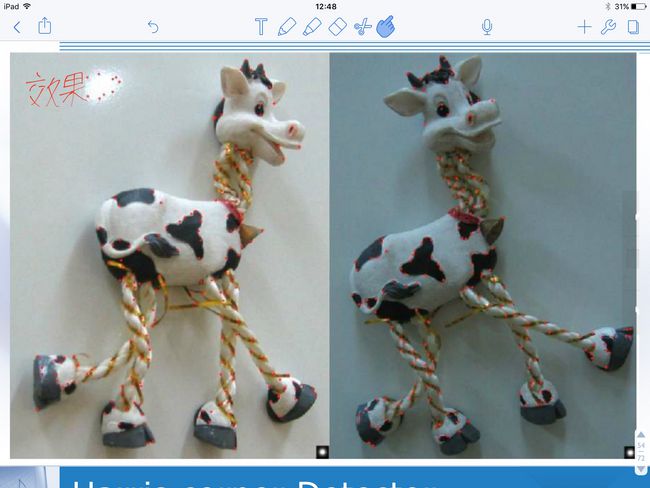
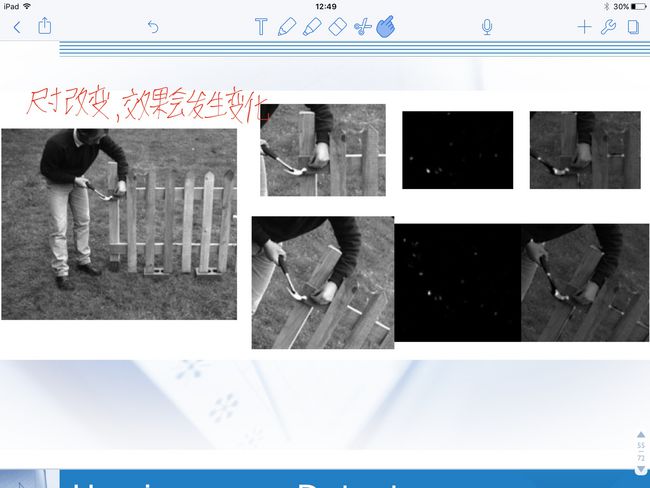
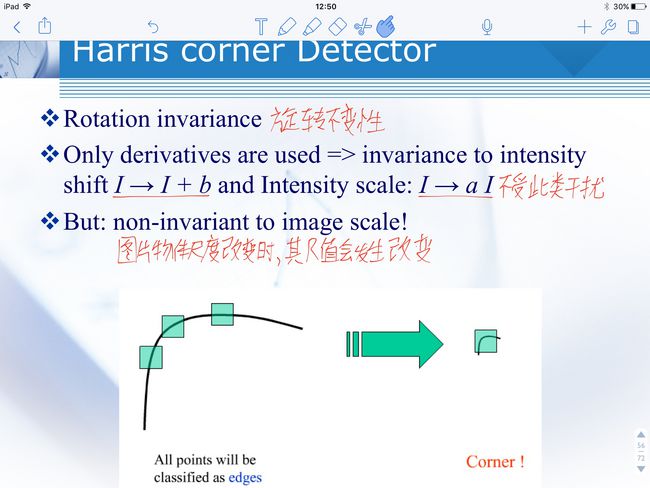
昨天帮老师做几页关于harris的PPT,又回顾了一遍harris算法,这里有几页比较好的讲解,分享一下。另参考wiki Corner detection
PPT上字写的烂,不要介意,哈哈。

—————————————————————
2. 亚像素级角点检测这一点,书中介绍的比较简略。定理是:在角点q附近的点的灰度梯度均垂直于该点与角点的连线。根据这条定理,我们可以找到多个关于p和q的方程组,从而求解出q的位置。深入探讨,详见Harris角点提取实现亚像素级摄像机自标定
3 . 本节函数清单
三:相关源码及解析
本章示例较多,示例列表:
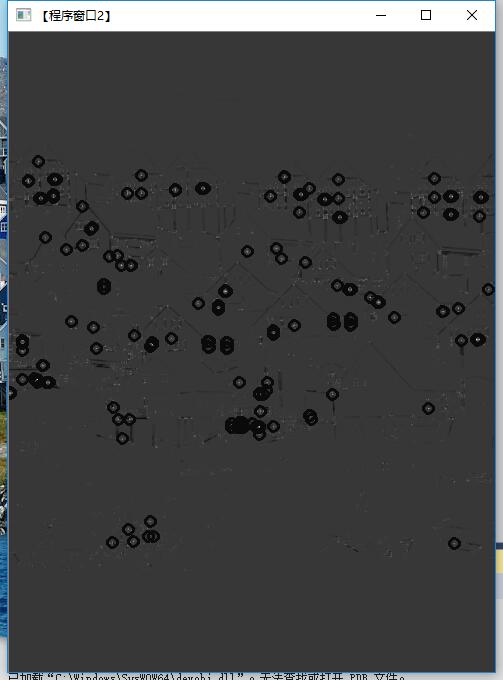
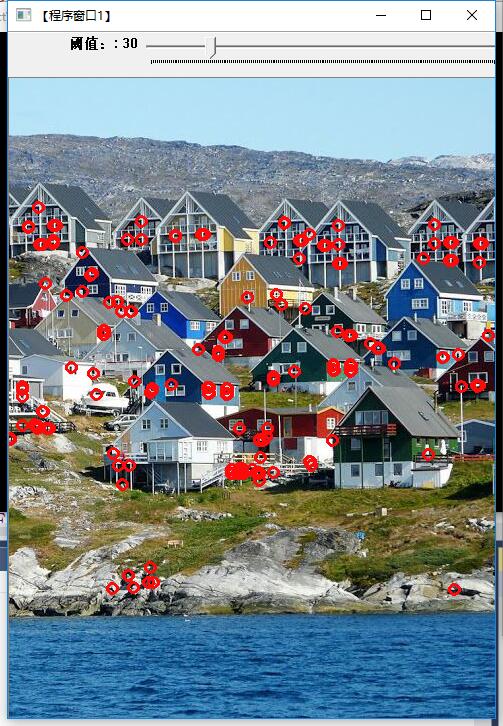
1.Harris角点检测与绘制
2.Shi-Tomasi角点检测
3.亚像素级角点检测
1 . Harris角点检测与绘制
源码:
#include素材:

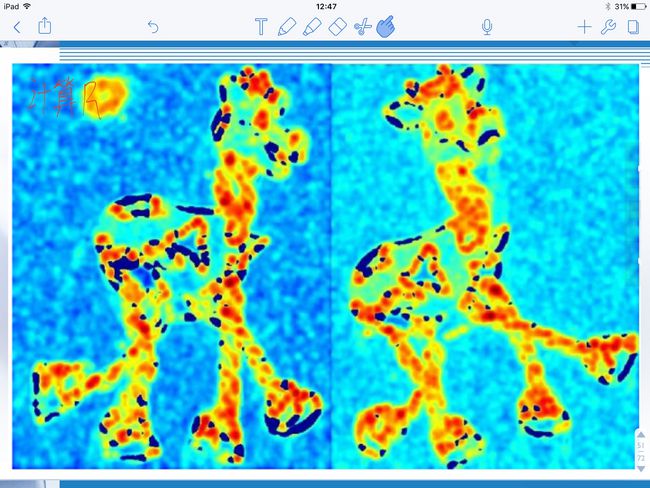
效果图:
提示:
无
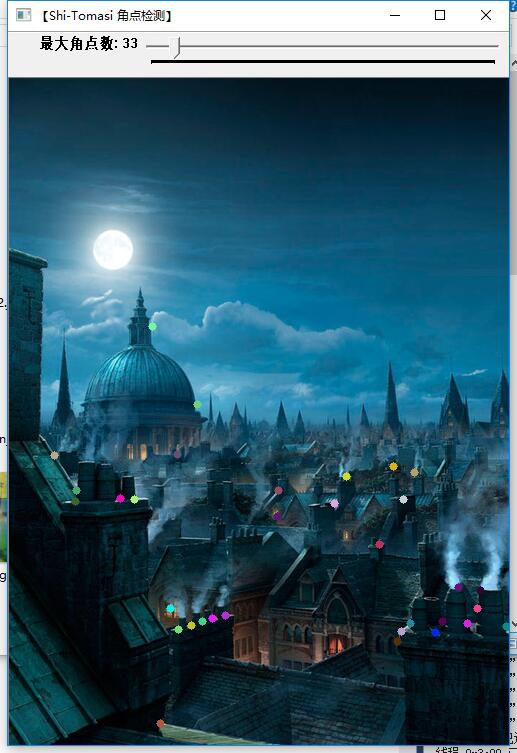
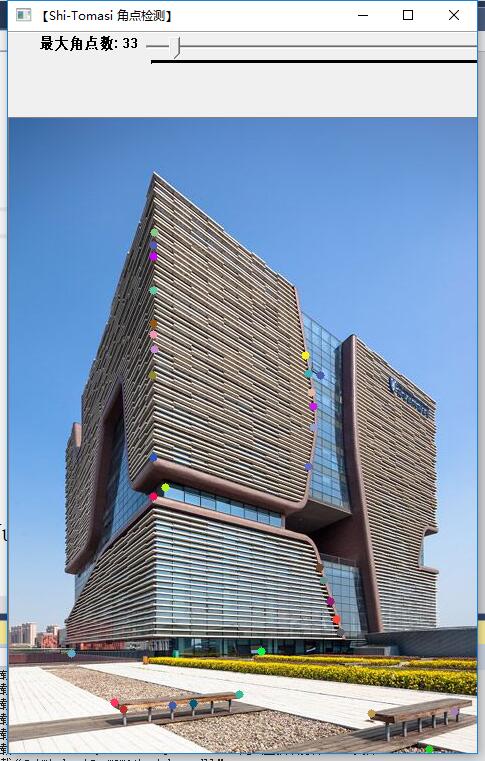
2 . Shi-Tomasi角点检测
源码:
#include素材:

效果图:
提示:
无
3 . 亚像素级角点检测
源码:
#include素材:

效果图:

提示:
无