今天我们接着上一讲“#9 生成对抗网络101 终极入门与通俗解析”, 手把手教你写一个生成对抗网络。参考代码是:https://github.com/AYLIEN/gan-intro
关键python库: TensorFlow, numpy, matplotlib, scipy
我们上次讲过,生成对抗网络同时训练两个模型, 叫做生成器和判断器. 生成器竭尽全力模仿真实分布生成数据; 判断器竭尽全力区分出真实样本和生成器生成的模仿样本. 直到判断器无法区分出真实样本和模仿样本为止.
来自:http://blog.aylien.com/introduction-generative-adversarial-networks-code-tensorflow/ 上图是一个生成对抗网络的训练过程,我们所要讲解的代码就是要实现这样的训练过程。
其中, 绿色线的分布是一个高斯分布(真实分布),期望和方差都是固定值,所以分布稳定。红色线的分布是生成器分布,他在训练过程中与判断器对抗,不断改变分布模仿绿色线高斯分布. 整个过程不断模仿绿色线。蓝色线的分布就是判断器,约定为, 概率密度越高, 认为真实数据的可能性越大. 可以看到蓝线在真实数据期望4的地方,蓝色线概率密度越来越小, 即, 判断器难区分出生成器和判断器.
接下来我们来啃一下David 9看过最复杂的TensorFlow源码逻辑:
首先看总体逻辑:
 来自: https://ishmaelbelghazi.github.io/ALI
来自: https://ishmaelbelghazi.github.io/ALI
正像之前所说, 有两个神经模型在交替训练. 生成模型输入噪声分布, 把噪声分布映射成很像真实分布的分布, 生成仿造的样本. 判断模型输入生成模型的仿造样本, 区分这个样本是不真实样本. 如果最后区分不出, 恭喜你, 模型训练的很不错.
我们的生成器模型映射作用很像下图:
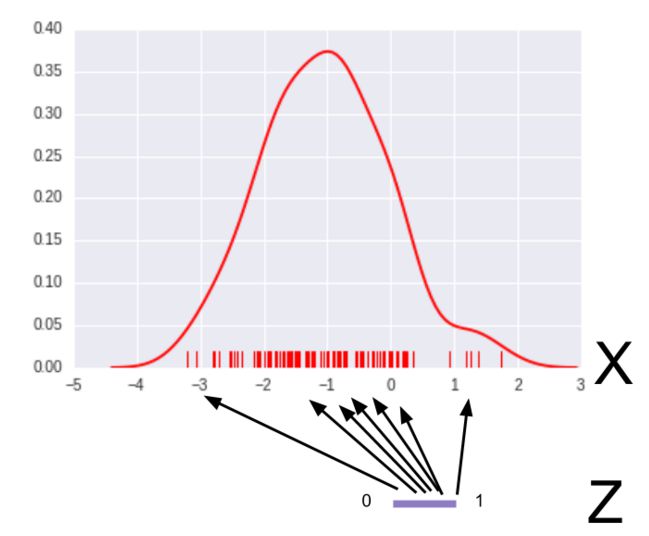
Z是一个平均分布加了点噪声而已. X是真实分布. 我们希望这个神经网络输入相同间隔的输入值 , 输出就能告诉我们这个值的概率密度(pdf)多大? 很显然-1这里pdf应该比较大.
Z如何写代码? 很简单:
- classGeneratorDistribution(object):
- def __init__(self,range):
- self.range = range
- def sample(self,N):
- return np.linspace(-self.range, self.range,N) + \
- np.random.random(N) * 0.01
查不多采样值像下图:
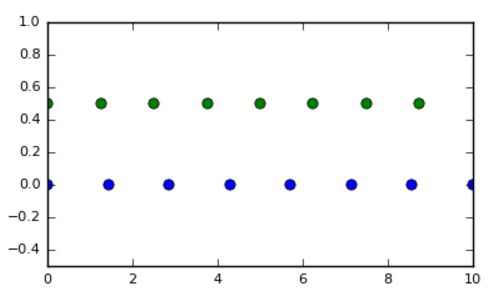
只是多了一点点噪声而已.
生成器用一层线性, 加一层非线性, 最后加一层线性的神经网络.
判断器需要强大一些, 用三层线神经网络去做:
- def discriminator(input, hidden_size):
- h0 = tf.tanh(linear(input, hidden_size * 2,'d0'))
- h1 = tf.tanh(linear(h0, hidden_size * 2,'d1'))
- h2 = tf.tanh(linear(h1, hidden_size * 2,'d2'))
- h3 = tf.sigmoid(linear(h2,1,'d3'))
- return h3
然后, 我们构造TensorFlow图, 还有判断器和生成器的损失函数:
- with tf.variable_scope('G'):
- z = tf.placeholder(tf.float32, shape=(None,1))
- G = generator(z, hidden_size)
- with tf.variable_scope('D')as scope:
- x = tf.placeholder(tf.float32, shape=(None,1))
- D1 = discriminator(x, hidden_size)
- scope.reuse_variables()
- D2 = discriminator(G, hidden_size)
- loss_d = tf.reduce_mean(-tf.log(D1) - tf.log(1 - D2))
- loss_g = tf.reduce_mean(-tf.log(D2))
最神奇的应该是这句:
- loss_d = tf.reduce_mean(-tf.log(D1) - tf.log(1 - D2))
我们有同样的一个判断模型, D1和D2的区别仅仅是D1的输入是真实数据, D2的输入是生成器的伪造数据. 注意, 代码中判断模型的输出是“认为一个样本在真实分布中的可能性”. 所以优化时目标是, D1的输出要尽量大, D2的输出要尽量小.
此外, 优化生成器的时候, 我们要欺骗判断器, 让D2的输出尽量大:
- loss_g = tf.reduce_mean(-tf.log(D2))
最难的难点, David 9 给大家已经讲解了. 如何写优化器(optimizer)和训练过程, 请大家参考源代码~
源代码:
- '''
- An example of distribution approximation using Generative Adversarial Networks in TensorFlow.
- Based on the blog post by Eric Jang: http://blog.evjang.com/2016/06/generative-adversarial-nets-in.html,
- and of course the original GAN paper by Ian Goodfellow et. al.: https://arxiv.org/abs/1406.2661.
- The minibatch discrimination technique is taken from Tim Salimans et. al.: https://arxiv.org/abs/1606.03498.
- '''
- from __future__ import absolute_import
- from __future__ import print_function
- from __future__ import unicode_literals
- from __future__ import division
- import argparse
- import numpy as np
- from scipy.statsimport norm
- import tensorflow as tf
- import matplotlib.pyplotas plt
- from matplotlib import animation
- import seaborn as sns
- sns.set(color_codes=True)
- seed =42
- np.random.seed(seed)
- tf.set_random_seed(seed)
- classDataDistribution(object):
- def __init__(self):
- self.mu = 4
- self.sigma = 0.5
- def sample(self,N):
- samples = np.random.normal(self.mu, self.sigma,N)
- samples.sort()
- return samples
- classGeneratorDistribution(object):
- def __init__(self,range):
- self.range = range
- def sample(self,N):
- return np.linspace(-self.range, self.range,N) + \
- np.random.random(N) * 0.01
- def linear(input, output_dim, scope=None, stddev=1.0):
- norm = tf.random_normal_initializer(stddev=stddev)
- const = tf.constant_initializer(0.0)
- with tf.variable_scope(scopeor'linear'):
- w = tf.get_variable('w',[input.get_shape()[1], output_dim], initializer=norm)
- b = tf.get_variable('b',[output_dim], initializer=const)
- return tf.matmul(input, w) + b
- def generator(input, h_dim):
- h0 = tf.nn.softplus(linear(input, h_dim, 'g0'))
- h1 = linear(h0,1,'g1')
- return h1
- def discriminator(input, h_dim, minibatch_layer=True):
- h0 = tf.tanh(linear(input, h_dim * 2,'d0'))
- h1 = tf.tanh(linear(h0, h_dim * 2,'d1'))
- # without the minibatch layer, the discriminator needs an additional layer
- # to have enough capacity to separate the two distributions correctly
- if minibatch_layer:
- h2 = minibatch(h1)
- else:
- h2 = tf.tanh(linear(h1, h_dim * 2, scope='d2'))
- h3 = tf.sigmoid(linear(h2,1, scope='d3'))
- return h3
- def minibatch(input, num_kernels=5, kernel_dim=3):
- x = linear(input, num_kernels * kernel_dim, scope='minibatch', stddev=0.02)
- activation = tf.reshape(x,(-1, num_kernels, kernel_dim))
- diffs = tf.expand_dims(activation,3) - tf.expand_dims(tf.transpose(activation,[1,2,0]),0)
- eps = tf.expand_dims(np.eye(int(input.get_shape()[0]), dtype=np.float32),1)
- abs_diffs = tf.reduce_sum(tf.abs(diffs),2) + eps
- minibatch_features = tf.reduce_sum(tf.exp(-abs_diffs),2)
- return tf.concat(1,[input, minibatch_features])
- def optimizer(loss, var_list):
- initial_learning_rate =0.005
- decay =0.95
- num_decay_steps =150
- batch = tf.Variable(0)
- learning_rate = tf.train.exponential_decay(
- initial_learning_rate,
- batch,
- num_decay_steps,
- decay,
- staircase=True
- )
- optimizer = tf.train.GradientDescentOptimizer(learning_rate).minimize(
- loss,
- global_step=batch,
- var_list=var_list
- )
- return optimizer
- classGAN(object):
- def __init__(self, data, gen, num_steps, batch_size, minibatch, log_every, anim_path):
- self.data = data
- self.gen = gen
- self.num_steps = num_steps
- self.batch_size = batch_size
- self.minibatch = minibatch
- self.log_every = log_every
- self.mlp_hidden_size = 4
- self.anim_path = anim_path
- self.anim_frames = []
- self._create_model()
- def _create_model(self):
- # In order to make sure that the discriminator is providing useful gradient
- # information to the generator from the start, we're going to pretrain the
- # discriminator using a maximum likelihood objective. We define the network
- # for this pretraining step scoped as D_pre.
- with tf.variable_scope('D_pre'):
- self.pre_input = tf.placeholder(tf.float32, shape=(self.batch_size,1))
- self.pre_labels = tf.placeholder(tf.float32, shape=(self.batch_size,1))
- D_pre = discriminator(self.pre_input, self.mlp_hidden_size, self.minibatch)
- self.pre_loss = tf.reduce_mean(tf.square(D_pre - self.pre_labels))
- self.pre_opt = optimizer(self.pre_loss,None)
- # This defines the generator network - it takes samples from a noise
- # distribution as input, and passes them through an MLP.
- with tf.variable_scope('G'):
- self.z = tf.placeholder(tf.float32, shape=(self.batch_size,1))
- self.G = generator(self.z, self.mlp_hidden_size)
- # The discriminator tries to tell the difference between samples from the
- # true data distribution (self.x) and the generated samples (self.z).
- #
- # Here we create two copies of the discriminator network (that share parameters),
- # as you cannot use the same network with different inputs in TensorFlow.
- with tf.variable_scope('D')as scope:
- self.x = tf.placeholder(tf.float32, shape=(self.batch_size,1))
- self.D1 = discriminator(self.x, self.mlp_hidden_size, self.minibatch)
- scope.reuse_variables()
- self.D2 = discriminator(self.G, self.mlp_hidden_size, self.minibatch)
- # Define the loss for discriminator and generator networks (see the original
- # paper for details), and create optimizers for both
- #self.pre_loss = tf.reduce_mean(tf.square(D_pre - self.pre_labels))
- self.loss_d = tf.reduce_mean(-tf.log(self.D1) - tf.log(1 - self.D2))
- self.loss_g = tf.reduce_mean(-tf.log(self.D2))
- vars = tf.trainable_variables()
- self.d_pre_params = [vfor v invarsif v.name.startswith('D_pre/')]
- self.d_params = [vfor v invarsif v.name.startswith('D/')]
- self.g_params = [vfor v invarsif v.name.startswith('G/')]
- #self.pre_opt = optimizer(self.pre_loss, self.d_pre_params)
- self.opt_d = optimizer(self.loss_d, self.d_params)
- self.opt_g = optimizer(self.loss_g, self.g_params)
- def train(self):
- with tf.Session()as session:
- tf.initialize_all_variables().run()
- # pretraining discriminator
- num_pretrain_steps =1000
- for step inxrange(num_pretrain_steps):
- d =(np.random.random(self.batch_size) - 0.5) * 10.0
- labels = norm.pdf(d, loc=self.data.mu, scale=self.data.sigma)
- pretrain_loss,_ = session.run([self.pre_loss, self.pre_opt],{
- self.pre_input: np.reshape(d,(self.batch_size,1)),
- self.pre_labels: np.reshape(labels,(self.batch_size,1))
- })
- self.weightsD = session.run(self.d_pre_params)
- # copy weights from pre-training over to new D network
- for i, v inenumerate(self.d_params):
- session.run(v.assign(self.weightsD[i]))
- for step inxrange(self.num_steps):
- # update discriminator
- x = self.data.sample(self.batch_size)
- z = self.gen.sample(self.batch_size)
- loss_d,_ = session.run([self.loss_d, self.opt_d],{
- self.x: np.reshape(x,(self.batch_size,1)),
- self.z: np.reshape(z,(self.batch_size,1))
- })
- # update generator
- z = self.gen.sample(self.batch_size)
- loss_g,_ = session.run([self.loss_g, self.opt_g],{
- self.z: np.reshape(z,(self.batch_size,1))
- })
- if step % self.log_every ==0:
- #pass
- print('{}: {}\t{}'.format(step, loss_d, loss_g))
- if self.anim_path:
- self.anim_frames.append(self._samples(session))
- if self.anim_path:
- self._save_animation()
- else:
- self._plot_distributions(session)
- def _samples(self, session, num_points=10000, num_bins=100):
- '''
- Return a tuple (db, pd, pg), where db is the current decision
- boundary, pd is a histogram of samples from the data distribution,
- and pg is a histogram of generated samples.
- '''
- xs = np.linspace(-self.gen.range, self.gen.range, num_points)
- bins = np.linspace(-self.gen.range, self.gen.range, num_bins)
- # decision boundary
- db = np.zeros((num_points,1))
- for i inrange(num_points// self.batch_size):
- db[self.batch_size * i:self.batch_size * (i + 1)] = session.run(self.D1,{
- self.x: np.reshape(
- xs[self.batch_size * i:self.batch_size * (i + 1)],
- (self.batch_size,1)
- )
- })
- # data distribution
- d = self.data.sample(num_points)
- pd,_ = np.histogram(d, bins=bins, density=True)
- # generated samples
- zs = np.linspace(-self.gen.range, self.gen.range, num_points)
- g = np.zeros((num_points,1))
- for i inrange(num_points// self.batch_size):
- g[self.batch_size * i:self.batch_size * (i + 1)] = session.run(self.G,{
- self.z: np.reshape(
- zs[self.batch_size * i:self.batch_size * (i + 1)],
- (self.batch_size,1)
- )
- })
- pg,_ = np.histogram(g, bins=bins, density=True)
- return db, pd, pg
- def _plot_distributions(self, session):
- db, pd, pg = self._samples(session)
- db_x = np.linspace(-self.gen.range, self.gen.range,len(db))
- p_x = np.linspace(-self.gen.range, self.gen.range,len(pd))
- f, ax = plt.subplots(1)
- ax.plot(db_x, db, label='decision boundary')
- ax.set_ylim(0,1)
- plt.plot(p_x, pd, label='real data')
- plt.plot(p_x, pg, label='generated data')
- plt.title('1D Generative Adversarial Network')
- plt.xlabel('Data values')
- plt.ylabel('Probability density')
- plt.legend()
- plt.show()
- def _save_animation(self):
- f, ax = plt.subplots(figsize=(6,4))
- f.suptitle('1D Generative Adversarial Network', fontsize=15)
- plt.xlabel('Data values')
- plt.ylabel('Probability density')
- ax.set_xlim(-6,6)
- ax.set_ylim(0,1.4)
- line_db, = ax.plot([],[], label='decision boundary')
- line_pd, = ax.plot([],[], label='real data')
- line_pg, = ax.plot([],[], label='generated data')
- frame_number = ax.text(
- 0.02,
- 0.95,
- '',
- horizontalalignment='left',
- verticalalignment='top',
- transform=ax.transAxes
- )
- ax.legend()
- db, pd,_ = self.anim_frames[0]
- db_x = np.linspace(-self.gen.range, self.gen.range,len(db))
- p_x = np.linspace(-self.gen.range, self.gen.range,len(pd))
- def init():
- line_db.set_data([],[])
- line_pd.set_data([],[])
- line_pg.set_data([],[])
- frame_number.set_text('')
- return(line_db, line_pd, line_pg, frame_number)
- def animate(i):
- frame_number.set_text(
- 'Frame: {}/{}'.format(i,len(self.anim_frames))
- )
- db, pd, pg = self.anim_frames[i]
- line_db.set_data(db_x, db)
- line_pd.set_data(p_x, pd)
- line_pg.set_data(p_x, pg)
- return(line_db, line_pd, line_pg, frame_number)
- anim = animation.FuncAnimation(
- f,
- animate,
- init_func=init,
- frames=len(self.anim_frames),
- blit=True
- )
- anim.save(self.anim_path, fps=30, extra_args=['-vcodec','libx264'])
- def main(args):
- model =GAN(
- DataDistribution(),
- GeneratorDistribution(range=8),
- args.num_steps,
- args.batch_size,
- args.minibatch,
- args.log_every,
- args.anim
- )
- model.train()
- def parse_args():
- parser = argparse.ArgumentParser()
- parser.add_argument('--num-steps',type=int, default=1200,
- help='the number of training steps to take')
- parser.add_argument('--batch-size',type=int, default=12,
- help='the batch size')
- parser.add_argument('--minibatch',type=bool, default=False,
- help='use minibatch discrimination')
- parser.add_argument('--log-every',type=int, default=10,
- help='print loss after this many steps')
- parser.add_argument('--anim',type=str, default=None,
- help='name of the output animation file (default: none)')
- return parser.parse_args()
- if __name__ == '__main__':
- '''
- data_sample =DataDistribution()
- d = data_sample.sample(10)
- print(d)
- '''
- main(parse_args())
参考文献:
生成对抗网络是14年Goodfellow Ian在论文Generative Adversarial Nets中提出来的。
记录下自己的理解,日后忘记了也能用于复习。
原文地址: http://blog.csdn.net/sxf1061926959/article/details/54630462
生成模型和判别模型
理解对抗网络,首先要了解生成模型和判别模型。判别模型比较好理解,就像分类一样,有一个判别界限,通过这个判别界限去区分样本。从概率角度分析就是获得样本x属于类别y的概率,是一个条件概率P(y|x).而生成模型是需要在整个条件内去产生数据的分布,就像高斯分布一样,他需要去拟合整个分布,从概率角度分析就是样本x在整个分布中的产生的概率,即联合概率P(xy)。具体可以参考博文http://blog.csdn.net/zouxy09/article/details/8195017或者这一篇http://www.cnblogs.com/jerrylead/archive/2011/03/05/1971903.html详细地阐述了具体的数学推理过程。
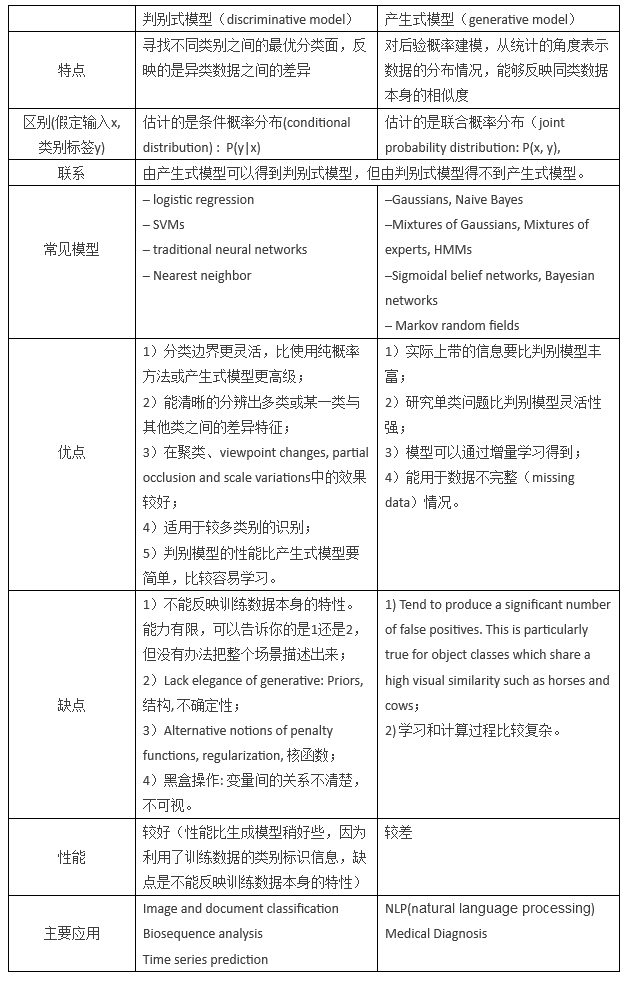
两个模型的对比详见,原文链接http://blog.csdn.net/wolenski/article/details/7985426
两个模型的对比
对抗网络思想
理解了生成模型和判别模型后,再来理解对抗网络就很直接了,对抗网络只是提出了一种网络结构,总体来说,整个框架还是很简单的。GANs简单的想法就是用两个模型,一个生成模型,一个判别模型。判别模型用于判断一个给定的图片是不是真实的图片(判断该图片是从数据集里获取的真实图片还是生成器生成的图片),生成模型的任务是去创造一个看起来像真的图片一样的图片,有点拗口,就是说模型自己去产生一个图片,可以和你想要的图片很像。而在开始的时候这两个模型都是没有经过训练的,这两个模型一起对抗训练,生成模型产生一张图片去欺骗判别模型,然后判别模型去判断这张图片是真是假,最终在这两个模型训练的过程中,两个模型的能力越来越强,最终达到稳态。(这里用图片举例,但是GANs的用途很广,不单单是图片,其他数据,或者就是简单的二维高斯也是可以的,用于拟合生成高斯分布。)
详细实现过程
下面我详细讲讲:
假设我们现在的数据集是手写体数字的数据集minst。
变量说明:初始化生成模型G、判别模型D(假设生成模型是一个简单的RBF,判别模型是一个简单的全连接网络,后面连接一层softmax(机器学习中常用的一种回归函数,详见https://www.zhihu.com/question/23765351)),样本为x,类别为y,这些都是假设,对抗网络的生成模型和判别模型没有任何限制。
前向传播阶段
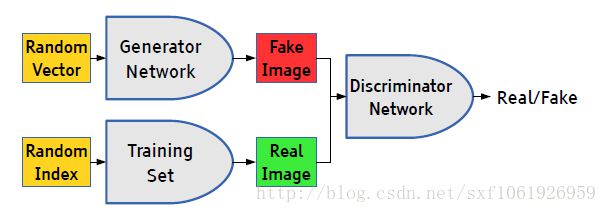
一、可以有两种输入
1、我们随机产生一个随机向量作为生成模型的数据,然后经过生成模型后产生一个新的向量,作为Fake Image,记作D(z)。
2、从数据集中随机选择一张图片,将图片转化成向量,作为Real Image,记作x。
二、将由1或者2产生的输出,作为判别网络的输入,经过判别网络后输入值为一个0到1之间的数,用于表示输入图片为Real Image的概率,real为1,fake为0。
使用得到的概率值计算损失函数,解释损失函数之前,我们先解释下判别模型的输入。根据输入的图片类型是Fake Image或Real Image将判别模型的输入数据的label标记为0或者1。即判别模型的输入类型为 ![]() 或者
或者![]() 。
。
判别模型的损失函数:
![]()
由于y为输入数据的类型,当输入的是从数据集中取出的real image数据时,y=1,上面公式的前半部分为0,只需考虑第二部分(后半部分)。又D(x)为判别模型的输出,表示输入x为real 数据(y=1,代表是real数据)的概率,我们的目的是让判别模型的输出D(x)的输出尽量靠近1。
由于y为输入数据的类型,当输入的是从数据集中取出的fake image数据时,y=0,上面公式的后半部分为0,只需考虑第一部分(前半部分)。又因G(z)是生成模型的输出,输出的是一张Fake Image(y=0,表示输出的是fake数据)。我们要做的是让D(G(z))的输出尽可能趋向于0。这样才能表示判别模型是有区分力的。
相对判别模型来说,这个损失函数其实就是交叉熵损失函数。计算loss,进行梯度反传。这里的梯度反传可以使用任何一种梯度修正的方法。
当更新完判别模型的参数后,我们再去更新生成模型的参数。
给出生成模型的损失函数:
![]()
对于生成模型来说,我们要做的是让G(z)产生的数据尽可能的和数据集中的数据(真实的数据)一样。就是所谓的同样的数据分布。那么我们要做的就是最小化生成模型的误差,即只将由G(z)产生的误差传给生成模型。
但是针对判别模型的预测结果,要对梯度变化的方向进行改变。当判别模型认为G(z)输出为真实数据集的时候和认为输出为噪声数据的时候,梯度更新方向要进行改变。
即最终的损失函数为:

其中![]() 表示判别模型的预测类别,对预测概率取整,为0或者1.用于更改梯度方向,阈值可以自己设置,或者正常的话就是0.5。
表示判别模型的预测类别,对预测概率取整,为0或者1.用于更改梯度方向,阈值可以自己设置,或者正常的话就是0.5。
反向传播
我们已经得到了生成模型和判别模型的损失函数,这样分开看其实就是两个单独的模型,针对不同的模型可以按照自己的需要去实现不同的误差修正,我们也可以选择最常用的BP做为误差修正算法,更新模型参数。
其实说了这么多,生成对抗网络的生成模型和判别模型是没有任何限制,生成对抗网络提出的只是一种网络结构,我们可以使用任何的生成模型和判别模型去实现一个生成对抗网络。当得到损失函数后就按照单个模型的更新方法进行修正即可。
原文给了这么一个优化函数:
![]() 看上去很难理解,我个人的理解是,它做的是要最大化D的区分度,最小化G和real数据集的数据分布。
看上去很难理解,我个人的理解是,它做的是要最大化D的区分度,最小化G和real数据集的数据分布。
GoodFellow的论文证明了Gans 全局最小点的充分必要条件是:
pdata表示真实data的分布函数
在训练过程中,pg不断地接近pdata,是收敛的判断标准。
我们知道,G和D是一个对抗的过程,而这个对抗是,G不断的学习,D也不断的学习,而且需要保证两者学习速率基本一致,也就是都能不断的从对方那里学习到“知识”来提升自己。否则,就是这两者哪一个学习的过快,或过慢,以至于双方的实力不再均衡,就会导致实力差的那一方的“loss”不再能“下降”,也就不在学到“知识”。一般的对抗模型中的G和D的网络框架大小基本上是相似(可能存在较小的差异),而且,训练的过程就是先训练G一次,再训练D一次,这也是为了稳定训练的一个保证。当然这并不能完全稳定训练,所以,对抗网络的稳定训练,依然是一个研究的热点和方向。
还有就是对抗网络当然依然很难生成分辨率大的但又不blurry的图片。从理论上来说也是很困难的事情,所以这个也是一个研究的目标。
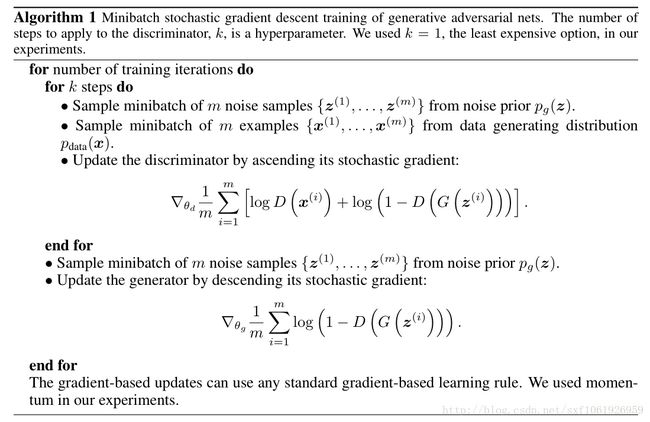
算法流程图
下图是原文给的算法流程,noise 就是随机输入生成模型的值。上面的解释加上这个图应该就能理解的差不多了。
noise输入的解释
上面那个noise也很好理解。如下图所示,假设我们现在的数据集是一个二维的高斯混合模型,那么这么noise就是x轴上我们随机输入的点,经过生成模型映射可以将x轴上的点映射到高斯混合模型上的点(将低维的映射为高维的)。当我们的数据集是图片的时候,那么我们输入的随机噪声其实就是相当于低维的数据,经过生成模型G的映射就变成了一张生成的图片G(x)。
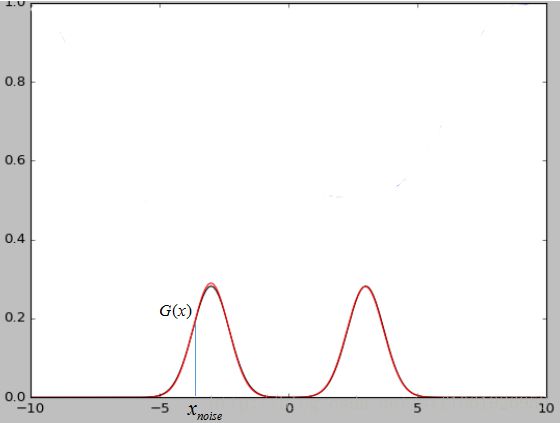
原文中也指出,最终两个模型达到稳态的时候判别模型D的输出接近1/2,也就是说判别器很难判断出图片是真是假,这也说明了网络是会达到收敛的。
GANs review
GANs一些新的应用方向在这篇博文中有所介绍,写的挺好:
https://adeshpande3.github.io/adeshpande3.github.io/Deep-Learning-Research-Review-Week-1-Generative-Adversarial-Nets
*####################################################