Yolo 目标检测总结帖(yolov3,yolov2)

由于项目的需求,需要完成一个目标检测的任务,经过个人一段时间的实践,现将自己实现的功能以及体验过的事情在这里做个总结,以便后续查看,也让其它人少走一些弯路,在这个过程中参考了一些博客,便于入门与提升。
个人将大多数的时间花费在yolov3上,其精度效果会比yolov2的效果要好,但仿真和测试时间会花费一倍左右的时间,并且将yolov3的过程弄明白之后,yolov2如何跑动只是更改部分参数和预训练模型罢了。注意,如果想训练自己的数据集,最好是有一台带GPU的服务器,一般运行到3w次左右其损失值会下降到0.0x的量级,CPU跑一个batchsize很慢,不建议使用CPU训练,但可以使用CPU进行测试,使用CPU进行测试时有个小技巧,能够加快一倍的测试时间。
文章分为以下几个部分:
1.准备工具
软硬件环境:本地MacBook Pro,阿里云服务器(P100显卡)
1.1 yolo网络下载
yolo官方网站:https://pjreddie.com/darknet/yolo/
github项目地址:https://github.com/pjreddie/darknet/tree/master/data
1.2 labelImg(有缺陷)
github项目地址: https://github.com/tzutalin/labelImg
2.安装
2.1 yolo包的安装
参考官方文档:https://pjreddie.com/darknet/install/
2.1.1 CPU版本
git clone https://github.com/pjreddie/darknet.git
cd darkness
make这里如果自己的电脑支持Openmp的话,也可以更改Makefile文件将其中的OPENMP的值更改为1,会加快训练和测试速度
GPU=0
CUDNN=0
OPENCV=0
OPENMP=0 # 若电脑支持Openmp时,可以将其设置为1
DEBUG=02.1.2 GPU版本
git clone https://github.com/pjreddie/darknet.git
cd darknet
vim Makefile
make对于GPU的Makefile更改的地方较多:
GPU=1 # 设置为1
CUDNN=1 # 设置为1
OPENCV=0 # 若后续想用opencv进行处理,可以将其设置为1
OPENMP=0
DEBUG=0
ARCH= -gencode arch=compute_30,code=sm_30 \
-gencode arch=compute_35,code=sm_35 \
-gencode arch=compute_50,code=[sm_50,compute_50] \
-gencode arch=compute_52,code=[sm_52,compute_52] \
-gencode arch=compute_60,code=[sm_60,compute_60] # 这个地方是根据自己的GPU架构进行设置,不同架构的GPU的运算能力不一样,本文使用的是帕斯卡结构,查阅英伟达官网查看对应的计算能力为6.0 # -gencode arch=compute_20,code=[sm_20,sm_21] \ This one is deprecated? # This is what I use, uncomment if you know your arch and want to specify
# ARCH= -gencode arch=compute_52,code=compute_52
VPATH=./src/:./examples
SLIB=libdarknet.so
ALIB=libdarknet.a
EXEC=darknet
OBJDIR=./obj/
CC=gcc
NVCC=nvcc # 这个地方若没有定义为环境变量,最好是使用绝对路径,大概位于`/usr/local/cuda/bin/nvcc`对于GPU版本的安装,需要根据对应的地方更改Makefile文件。
2.2 labelImg的安装
两种安装方式:
2.2.1 文件包安装的方式:
labelImg的文件包安装见github的地址:https://github.com/tzutalin/labelImg
2.2.2 pip安装:
pip install labelImg
or
brew install labelImg注意,经过实践,发现labelImg对.png格式图像不友好,不支持对.png图像的标注,即使标注出来其标签文件也不对。
3.数据集的准备与制作
数据集的准备安装网上教程即可:

3.1 数据集标注
labelImg的使用方法一些博客都有讲解:参考博客 https://blog.csdn.net/xunan003/article/details/78720189/
有几个关键的地方需要强调一下:

OpenDir 是要标注图像的文件地址
Change Save Dir 是修改保存标记文件的地址
Next Image 标注完点击这个进行下一张的标注
Prev Image 想查看之前标注的情况
PascalVOC/YOLO 这个可选,前一种是得到的格式为xml的标签文件,后一种是直接得到格式为txt的标签文件,后一种适用于YOLO网络,前一种适合RCNN系列文章,根据自身选择,本文由于之前尝试过使用RCNN系列模型,就先标记为xml文件,这里不用担心,darknet提供了转换程序./scripts/voc_label.py。
3.2 数据集xml转成yolo
对于使用tensorfloe-objection detection api的人来说,标签格式是xml,好在darknet中提供了将xml格式的标签转换为txt标签的函数,darknet提供了转换程序./scripts/voc_label.py。注意这里需要修改的地方:
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
# sets=[('2012', 'train'), ('2012', 'val'), ('2007', 'train'), ('2007', 'val'), ('2007', 'test')]
# 前一个表示年份,后一个表示训练或测试集文件
sets=[('2007', 'train'),('2007', 'test')]
# classes = ["aeroplane", "bicycle", "bird", "boat", "bottle", "bus", "car", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train", "tvmonitor"]
classes = ["1", "2", "3"]
# classes表示自己的类别名称
def convert(size, box):
dw = 1./(size[0])
dh = 1./(size[1])
x = (box[0] + box[1])/2.0 - 1
y = (box[2] + box[3])/2.0 - 1
w = box[1] - box[0]
h = box[3] - box[2]
x = x*dw
w = w*dw
y = y*dh
h = h*dh
return (x,y,w,h)
def convert_annotation(year, image_id):
in_file = open('VOCdevkit/VOC%s/Annotations/%s.xml'%(year, image_id))
out_file = open('VOCdevkit/VOC%s/labels/%s.txt'%(year, image_id), 'w')
tree=ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult)==1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text))
bb = convert((w,h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
wd = getcwd()
for year, image_set in sets:
if not os.path.exists('VOCdevkit/VOC%s/labels/'%(year)):
os.makedirs('VOCdevkit/VOC%s/labels/'%(year))
image_ids = open('VOCdevkit/VOC%s/ImageSets/Main/%s.txt'%(year, image_set)).read().strip().split()
list_file = open('%s_%s.txt'%(year, image_set), 'w')
for image_id in image_ids:
list_file.write('%s/VOCdevkit/VOC%s/JPEGImages/%s.jpg\n'%(wd, year, image_id))
convert_annotation(year, image_id)
list_file.close()
#这里将最后两行注射掉,运行后得到的训练集和测试集 组合在一起是整个数据集,而不是将训练集和测试集和一块作为训练集
#os.system("cat 2007_train.txt 2007_val.txt 2012_train.txt 2012_val.txt > train.txt")
#os.system("cat 2007_train.txt 2007_val.txt 2007_test.txt 2012_train.txt 2012_val.txt > train.all.txt")
运行之后,在./scripts文件夹就得到训练集和测试集txt
![]()
对应的label文件夹中有了转换好的txt格式的label:

4. 网络模型的训练与测试
4.1 网络模型的训练
4.1.1 需要更改的地方
修改cfg/voc.data
# 注意路径,相对路径和绝对路径都可以
classes= n #类别数为n 你分几类就将n设置为几
train = ./scripts/2007_train.txt #对应刚才生成的训练集txt
valid = ./scripts/2007_test.txt
names = data/voc.names
backup = ./results/ #网络模型训练好的参数保存路径修改data/voc.names
#在这个地方输入你标签的名称,每类一行,比如我分三类,分别为“ni”,"hao","ma",则下面是
ni
has
ma修改cfg/yolov3-voc.cfg 网络模型参数
[net]
# 将头部代码更改为train,batch数量根据你自身的电脑能力设置,默认设置是64
# Testing
# batch=1
# subdivisions=1
# Training
batch=64
subdivisions=16
width=416
height=416
channels=3
momentum=0.9
decay=0.0005
angle=0
saturation = 1.5
exposure = 1.5
hue=.1
learning_rate=0.001
burn_in=1000
max_batches = 50200 #最大迭代batches数
policy=steps
steps=20000,35000 # 每迭代多少次改变一次学习率,这里是*0.1
scales=.1,.1
[convolutional]
size=1
stride=1
pad=1
filters=24 #这里filters数量更改,与类别有关,一般公式是(classes_nums + 5) *3
activation=linear
[yolo]
mask = 0,1,2
anchors = 10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326
classes=3 # 修改成你自己的类别数
num=9
jitter=.3
ignore_thresh = .5
truth_thresh = 1
random=04.1.2 预训练模型训练
目前都是使用迁移学习,将成熟网络的部分参数直接用过来,这里也一样:
下装与训练模型:
wget https://pjreddie.com/media/files/darknet53.conv.74训练:
./darknet detector train cfg/voc.data cfg/yolov3-voc.cfg darknet53.conv.744.1.3 中断后继续训练
当训练进行到一半的时候,可能中途中断或者是停了想继续进行时,只需将上面的语句最后的预训练权重更换为之前在voc.data中设置的模型训练保存路径中存在的权重即可,这里以yolov3.weights表示:
./darknet detector train cfg/voc.data cfg/yolov3-voc.cfg results/yolov3.weights4.2 网络模型的测试
4.2.1 单张测试
单张测试就是指定一张图像名称进行测试,可类似于darknet网站中给定的例子那样,只不过需要修改相关路径及被测图片名称:
./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg./darknet detect cfg/yolov3.cfg result/yolov3.weights /path/to/your picture4.2.2 批量测试
如果想进行批量测试,则需要修改对应的源码,参考博客 https://blog.csdn.net/mieleizhi0522/article/details/79989754
但存在一个问题是无法将检测后的图像保存时,其名称与原始名称一样,有时候出错为null,在其基础上对其GetFilename函数进行修改。
#include "darknet.h"
static int coco_ids[] = {1,2,3,4,5,6,7,8,9,10,11,13,14,15,16,17,18,19,20,21,22,23,24,25,27,28,31,32,33,34,35,36,37,38,39,40,41,42,43,44,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,67,70,72,73,74,75,76,77,78,79,80,81,82,84,85,86,87,88,89,90};
//获取文件的名字
char* GetFilename(char *fullname)
{
int from,to,i;
char *newstr,*temp;
if(fullname!=NULL)
{
if((temp=strchr(fullname,'.'))==NULL)//if not find dot
newstr = fullname;
else
{
from = strlen(fullname) - 1;
to = (temp-fullname); //the first dot's index;
for(i=from;i--;i<=to)
if(fullname[i]=='.')break;//find the last dot
newstr = (char*)malloc(i+1);
strncpy(newstr,fullname,i);
*(newstr+i)=0;
}
}
char name[50] = {""};
char *q = strrchr(newstr,'/') + 1;
strncpy(name,q,40);
return name;
}
void train_detector(char *datacfg, char *cfgfile, char *weightfile, int *gpus, int ngpus, int clear)
{
list *options = read_data_cfg(datacfg);
char *train_images = option_find_str(options, "train", "data/train.list");
char *backup_directory = option_find_str(options, "backup", "/backup/");
srand(time(0));
char *base = basecfg(cfgfile);
printf("%s\n", base);
float avg_loss = -1;
network **nets = calloc(ngpus, sizeof(network));
srand(time(0));
int seed = rand();
int i;
for(i = 0; i < ngpus; ++i){
srand(seed);
#ifdef GPU
cuda_set_device(gpus[i]);
#endif
nets[i] = load_network(cfgfile, weightfile, clear);
nets[i]->learning_rate *= ngpus;
}
srand(time(0));
network *net = nets[0];
int imgs = net->batch * net->subdivisions * ngpus;
printf("Learning Rate: %g, Momentum: %g, Decay: %g\n", net->learning_rate, net->momentum, net->decay);
data train, buffer;
layer l = net->layers[net->n - 1];
int classes = l.classes;
float jitter = l.jitter;
list *plist = get_paths(train_images);
//int N = plist->size;
char **paths = (char **)list_to_array(plist);
load_args args = get_base_args(net);
args.coords = l.coords;
args.paths = paths;
args.n = imgs;
args.m = plist->size;
args.classes = classes;
args.jitter = jitter;
args.num_boxes = l.max_boxes;
args.d = &buffer;
args.type = DETECTION_DATA;
//args.type = INSTANCE_DATA;
args.threads = 64;
pthread_t load_thread = load_data(args);
double time;
int count = 0;
//while(i*imgs < N*120){
while(get_current_batch(net) < net->max_batches){
if(l.random && count++%10 == 0){
printf("Resizing\n");
int dim = (rand() % 10 + 10) * 32;
if (get_current_batch(net)+200 > net->max_batches) dim = 608;
//int dim = (rand() % 4 + 16) * 32;
printf("%d\n", dim);
args.w = dim;
args.h = dim;
pthread_join(load_thread, 0);
train = buffer;
free_data(train);
load_thread = load_data(args);
#pragma omp parallel for
for(i = 0; i < ngpus; ++i){
resize_network(nets[i], dim, dim);
}
net = nets[0];
}
time=what_time_is_it_now();
pthread_join(load_thread, 0);
train = buffer;
load_thread = load_data(args);
/*
int k;
for(k = 0; k < l.max_boxes; ++k){
box b = float_to_box(train.y.vals[10] + 1 + k*5);
if(!b.x) break;
printf("loaded: %f %f %f %f\n", b.x, b.y, b.w, b.h);
}
*/
/*
int zz;
for(zz = 0; zz < train.X.cols; ++zz){
image im = float_to_image(net->w, net->h, 3, train.X.vals[zz]);
int k;
for(k = 0; k < l.max_boxes; ++k){
box b = float_to_box(train.y.vals[zz] + k*5, 1);
printf("%f %f %f %f\n", b.x, b.y, b.w, b.h);
draw_bbox(im, b, 1, 1,0,0);
}
show_image(im, "truth11");
cvWaitKey(0);
save_image(im, "truth11");
}
*/
printf("Loaded: %lf seconds\n", what_time_is_it_now()-time);
time=what_time_is_it_now();
float loss = 0;
#ifdef GPU
if(ngpus == 1){
loss = train_network(net, train);
} else {
loss = train_networks(nets, ngpus, train, 4);
}
#else
loss = train_network(net, train);
#endif
if (avg_loss < 0) avg_loss = loss;
avg_loss = avg_loss*.9 + loss*.1;
i = get_current_batch(net);
printf("%ld: %f, %f avg, %f rate, %lf seconds, %d images\n", get_current_batch(net), loss, avg_loss, get_current_rate(net), what_time_is_it_now()-time, i*imgs);
if(i%100==0){
#ifdef GPU
if(ngpus != 1) sync_nets(nets, ngpus, 0);
#endif
char buff[256];
sprintf(buff, "%s/%s.backup", backup_directory, base);
save_weights(net, buff);
}
if(i%10000==0 || (i < 1000 && i%100 == 0)){
#ifdef GPU
if(ngpus != 1) sync_nets(nets, ngpus, 0);
#endif
char buff[256];
sprintf(buff, "%s/%s_%d.weights", backup_directory, base, i);
save_weights(net, buff);
}
free_data(train);
}
#ifdef GPU
if(ngpus != 1) sync_nets(nets, ngpus, 0);
#endif
char buff[256];
sprintf(buff, "%s/%s_final.weights", backup_directory, base);
save_weights(net, buff);
}
static int get_coco_image_id(char *filename)
{
char *p = strrchr(filename, '/');
char *c = strrchr(filename, '_');
if(c) p = c;
return atoi(p+1);
}
static void print_cocos(FILE *fp, char *image_path, detection *dets, int num_boxes, int classes, int w, int h)
{
int i, j;
int image_id = get_coco_image_id(image_path);
for(i = 0; i < num_boxes; ++i){
float xmin = dets[i].bbox.x - dets[i].bbox.w/2.;
float xmax = dets[i].bbox.x + dets[i].bbox.w/2.;
float ymin = dets[i].bbox.y - dets[i].bbox.h/2.;
float ymax = dets[i].bbox.y + dets[i].bbox.h/2.;
if (xmin < 0) xmin = 0;
if (ymin < 0) ymin = 0;
if (xmax > w) xmax = w;
if (ymax > h) ymax = h;
float bx = xmin;
float by = ymin;
float bw = xmax - xmin;
float bh = ymax - ymin;
for(j = 0; j < classes; ++j){
if (dets[i].prob[j]) fprintf(fp, "{\"image_id\":%d, \"category_id\":%d, \"bbox\":[%f, %f, %f, %f], \"score\":%f},\n", image_id, coco_ids[j], bx, by, bw, bh, dets[i].prob[j]);
}
}
}
void print_detector_detections(FILE **fps, char *id, detection *dets, int total, int classes, int w, int h)
{
int i, j;
for(i = 0; i < total; ++i){
float xmin = dets[i].bbox.x - dets[i].bbox.w/2. + 1;
float xmax = dets[i].bbox.x + dets[i].bbox.w/2. + 1;
float ymin = dets[i].bbox.y - dets[i].bbox.h/2. + 1;
float ymax = dets[i].bbox.y + dets[i].bbox.h/2. + 1;
if (xmin < 1) xmin = 1;
if (ymin < 1) ymin = 1;
if (xmax > w) xmax = w;
if (ymax > h) ymax = h;
for(j = 0; j < classes; ++j){
if (dets[i].prob[j]) fprintf(fps[j], "%s %f %f %f %f %f\n", id, dets[i].prob[j],
xmin, ymin, xmax, ymax);
}
}
}
void print_imagenet_detections(FILE *fp, int id, detection *dets, int total, int classes, int w, int h)
{
int i, j;
for(i = 0; i < total; ++i){
float xmin = dets[i].bbox.x - dets[i].bbox.w/2.;
float xmax = dets[i].bbox.x + dets[i].bbox.w/2.;
float ymin = dets[i].bbox.y - dets[i].bbox.h/2.;
float ymax = dets[i].bbox.y + dets[i].bbox.h/2.;
if (xmin < 0) xmin = 0;
if (ymin < 0) ymin = 0;
if (xmax > w) xmax = w;
if (ymax > h) ymax = h;
for(j = 0; j < classes; ++j){
int class = j;
if (dets[i].prob[class]) fprintf(fp, "%d %d %f %f %f %f %f\n", id, j+1, dets[i].prob[class],
xmin, ymin, xmax, ymax);
}
}
}
void validate_detector_flip(char *datacfg, char *cfgfile, char *weightfile, char *outfile)
{
int j;
list *options = read_data_cfg(datacfg);
char *valid_images = option_find_str(options, "valid", "data/train.list");
char *name_list = option_find_str(options, "names", "data/names.list");
char *prefix = option_find_str(options, "results", "results");
char **names = get_labels(name_list);
char *mapf = option_find_str(options, "map", 0);
int *map = 0;
if (mapf) map = read_map(mapf);
network *net = load_network(cfgfile, weightfile, 0);
set_batch_network(net, 2);
fprintf(stderr, "Learning Rate: %g, Momentum: %g, Decay: %g\n", net->learning_rate, net->momentum, net->decay);
srand(time(0));
list *plist = get_paths(valid_images);
char **paths = (char **)list_to_array(plist);
layer l = net->layers[net->n-1];
int classes = l.classes;
char buff[1024];
char *type = option_find_str(options, "eval", "voc");
FILE *fp = 0;
FILE **fps = 0;
int coco = 0;
int imagenet = 0;
if(0==strcmp(type, "coco")){
if(!outfile) outfile = "coco_results";
snprintf(buff, 1024, "%s/%s.json", prefix, outfile);
fp = fopen(buff, "w");
fprintf(fp, "[\n");
coco = 1;
} else if(0==strcmp(type, "imagenet")){
if(!outfile) outfile = "imagenet-detection";
snprintf(buff, 1024, "%s/%s.txt", prefix, outfile);
fp = fopen(buff, "w");
imagenet = 1;
classes = 200;
} else {
if(!outfile) outfile = "comp4_det_test_";
fps = calloc(classes, sizeof(FILE *));
for(j = 0; j < classes; ++j){
snprintf(buff, 1024, "%s/%s%s.txt", prefix, outfile, names[j]);
fps[j] = fopen(buff, "w");
}
}
int m = plist->size;
int i=0;
int t;
float thresh = .005;
float nms = .45;
int nthreads = 4;
image *val = calloc(nthreads, sizeof(image));
image *val_resized = calloc(nthreads, sizeof(image));
image *buf = calloc(nthreads, sizeof(image));
image *buf_resized = calloc(nthreads, sizeof(image));
pthread_t *thr = calloc(nthreads, sizeof(pthread_t));
image input = make_image(net->w, net->h, net->c*2);
load_args args = {0};
args.w = net->w;
args.h = net->h;
//args.type = IMAGE_DATA;
args.type = LETTERBOX_DATA;
for(t = 0; t < nthreads; ++t){
args.path = paths[i+t];
args.im = &buf[t];
args.resized = &buf_resized[t];
thr[t] = load_data_in_thread(args);
}
double start = what_time_is_it_now();
for(i = nthreads; i < m+nthreads; i += nthreads){
fprintf(stderr, "%d\n", i);
for(t = 0; t < nthreads && i+t-nthreads < m; ++t){
pthread_join(thr[t], 0);
val[t] = buf[t];
val_resized[t] = buf_resized[t];
}
for(t = 0; t < nthreads && i+t < m; ++t){
args.path = paths[i+t];
args.im = &buf[t];
args.resized = &buf_resized[t];
thr[t] = load_data_in_thread(args);
}
for(t = 0; t < nthreads && i+t-nthreads < m; ++t){
char *path = paths[i+t-nthreads];
char *id = basecfg(path);
copy_cpu(net->w*net->h*net->c, val_resized[t].data, 1, input.data, 1);
flip_image(val_resized[t]);
copy_cpu(net->w*net->h*net->c, val_resized[t].data, 1, input.data + net->w*net->h*net->c, 1);
network_predict(net, input.data);
int w = val[t].w;
int h = val[t].h;
int num = 0;
detection *dets = get_network_boxes(net, w, h, thresh, .5, map, 0, &num);
if (nms) do_nms_sort(dets, num, classes, nms);
if (coco){
print_cocos(fp, path, dets, num, classes, w, h);
} else if (imagenet){
print_imagenet_detections(fp, i+t-nthreads+1, dets, num, classes, w, h);
} else {
print_detector_detections(fps, id, dets, num, classes, w, h);
}
free_detections(dets, num);
free(id);
free_image(val[t]);
free_image(val_resized[t]);
}
}
for(j = 0; j < classes; ++j){
if(fps) fclose(fps[j]);
}
if(coco){
fseek(fp, -2, SEEK_CUR);
fprintf(fp, "\n]\n");
fclose(fp);
}
fprintf(stderr, "Total Detection Time: %f Seconds\n", what_time_is_it_now() - start);
}
void validate_detector(char *datacfg, char *cfgfile, char *weightfile, char *outfile)
{
int j;
list *options = read_data_cfg(datacfg);
char *valid_images = option_find_str(options, "valid", "data/train.list");
char *name_list = option_find_str(options, "names", "data/names.list");
char *prefix = option_find_str(options, "results", "results");
char **names = get_labels(name_list);
char *mapf = option_find_str(options, "map", 0);
int *map = 0;
if (mapf) map = read_map(mapf);
network *net = load_network(cfgfile, weightfile, 0);
set_batch_network(net, 1);
fprintf(stderr, "Learning Rate: %g, Momentum: %g, Decay: %g\n", net->learning_rate, net->momentum, net->decay);
srand(time(0));
list *plist = get_paths(valid_images);
char **paths = (char **)list_to_array(plist);
layer l = net->layers[net->n-1];
int classes = l.classes;
char buff[1024];
char *type = option_find_str(options, "eval", "voc");
FILE *fp = 0;
FILE **fps = 0;
int coco = 0;
int imagenet = 0;
if(0==strcmp(type, "coco")){
if(!outfile) outfile = "coco_results";
snprintf(buff, 1024, "%s/%s.json", prefix, outfile);
fp = fopen(buff, "w");
fprintf(fp, "[\n");
coco = 1;
} else if(0==strcmp(type, "imagenet")){
if(!outfile) outfile = "imagenet-detection";
snprintf(buff, 1024, "%s/%s.txt", prefix, outfile);
fp = fopen(buff, "w");
imagenet = 1;
classes = 200;
} else {
if(!outfile) outfile = "comp4_det_test_";
fps = calloc(classes, sizeof(FILE *));
for(j = 0; j < classes; ++j){
snprintf(buff, 1024, "%s/%s%s.txt", prefix, outfile, names[j]);
fps[j] = fopen(buff, "w");
}
}
int m = plist->size;
int i=0;
int t;
float thresh = .005;
float nms = .45;
int nthreads = 4;
image *val = calloc(nthreads, sizeof(image));
image *val_resized = calloc(nthreads, sizeof(image));
image *buf = calloc(nthreads, sizeof(image));
image *buf_resized = calloc(nthreads, sizeof(image));
pthread_t *thr = calloc(nthreads, sizeof(pthread_t));
load_args args = {0};
args.w = net->w;
args.h = net->h;
//args.type = IMAGE_DATA;
args.type = LETTERBOX_DATA;
for(t = 0; t < nthreads; ++t){
args.path = paths[i+t];
args.im = &buf[t];
args.resized = &buf_resized[t];
thr[t] = load_data_in_thread(args);
}
double start = what_time_is_it_now();
for(i = nthreads; i < m+nthreads; i += nthreads){
fprintf(stderr, "%d\n", i);
for(t = 0; t < nthreads && i+t-nthreads < m; ++t){
pthread_join(thr[t], 0);
val[t] = buf[t];
val_resized[t] = buf_resized[t];
}
for(t = 0; t < nthreads && i+t < m; ++t){
args.path = paths[i+t];
args.im = &buf[t];
args.resized = &buf_resized[t];
thr[t] = load_data_in_thread(args);
}
for(t = 0; t < nthreads && i+t-nthreads < m; ++t){
char *path = paths[i+t-nthreads];
char *id = basecfg(path);
float *X = val_resized[t].data;
network_predict(net, X);
int w = val[t].w;
int h = val[t].h;
int nboxes = 0;
detection *dets = get_network_boxes(net, w, h, thresh, .5, map, 0, &nboxes);
if (nms) do_nms_sort(dets, nboxes, classes, nms);
if (coco){
print_cocos(fp, path, dets, nboxes, classes, w, h);
} else if (imagenet){
print_imagenet_detections(fp, i+t-nthreads+1, dets, nboxes, classes, w, h);
} else {
print_detector_detections(fps, id, dets, nboxes, classes, w, h);
}
free_detections(dets, nboxes);
free(id);
free_image(val[t]);
free_image(val_resized[t]);
}
}
for(j = 0; j < classes; ++j){
if(fps) fclose(fps[j]);
}
if(coco){
fseek(fp, -2, SEEK_CUR);
fprintf(fp, "\n]\n");
fclose(fp);
}
fprintf(stderr, "Total Detection Time: %f Seconds\n", what_time_is_it_now() - start);
}
void validate_detector_recall(char *datacfg, char *cfgfile, char *weightfile)
{
network *net = load_network(cfgfile, weightfile, 0);
set_batch_network(net, 1);
fprintf(stderr, "Learning Rate: %g, Momentum: %g, Decay: %g\n", net->learning_rate, net->momentum, net->decay);
srand(time(0));
list *options = read_data_cfg(datacfg);
char *valid_images = option_find_str(options, "valid", "data/train.list");
list *plist = get_paths(valid_images);
char **paths = (char **)list_to_array(plist);
layer l = net->layers[net->n-1];
int j, k;
int m = plist->size;
int i=0;
float thresh = .001;
float iou_thresh = .5;
float nms = .4;
int total = 0;
int correct = 0;
int proposals = 0;
float avg_iou = 0;
for(i = 0; i < m; ++i){
char *path = paths[i];
image orig = load_image_color(path, 0, 0);
image sized = resize_image(orig, net->w, net->h);
char *id = basecfg(path);
network_predict(net, sized.data);
int nboxes = 0;
detection *dets = get_network_boxes(net, sized.w, sized.h, thresh, .5, 0, 1, &nboxes);
if (nms) do_nms_obj(dets, nboxes, 1, nms);
char labelpath[4096];
find_replace(path, "images", "labels", labelpath);
find_replace(labelpath, "JPEGImages", "labels", labelpath);
find_replace(labelpath, ".jpg", ".txt", labelpath);
find_replace(labelpath, ".JPEG", ".txt", labelpath);
int num_labels = 0;
box_label *truth = read_boxes(labelpath, &num_labels);
for(k = 0; k < nboxes; ++k){
if(dets[k].objectness > thresh){
++proposals;
}
}
for (j = 0; j < num_labels; ++j) {
++total;
box t = {truth[j].x, truth[j].y, truth[j].w, truth[j].h};
float best_iou = 0;
for(k = 0; k < l.w*l.h*l.n; ++k){
float iou = box_iou(dets[k].bbox, t);
if(dets[k].objectness > thresh && iou > best_iou){
best_iou = iou;
}
}
avg_iou += best_iou;
if(best_iou > iou_thresh){
++correct;
}
}
fprintf(stderr, "%5d %5d %5d\tRPs/Img: %.2f\tIOU: %.2f%%\tRecall:%.2f%%\n", i, correct, total, (float)proposals/(i+1), avg_iou*100/total, 100.*correct/total);
free(id);
free_image(orig);
free_image(sized);
}
}
void test_detector(char *datacfg, char *cfgfile, char *weightfile, char *filename, float thresh, float hier_thresh, char *outfile, int fullscreen)
{
list *options = read_data_cfg(datacfg);
char *name_list = option_find_str(options, "names", "data/names.list");
char **names = get_labels(name_list);
image **alphabet = load_alphabet();
network *net = load_network(cfgfile, weightfile, 0);
set_batch_network(net, 1);
srand(2222222);
double time;
char buff[256];
char *input = buff;
float nms=.45;
int i=0;
while(1){
if(filename){
strncpy(input, filename, 256);
image im = load_image_color(input,0,0);
image sized = letterbox_image(im, net->w, net->h);
//image sized = resize_image(im, net->w, net->h);
//image sized2 = resize_max(im, net->w);
//image sized = crop_image(sized2, -((net->w - sized2.w)/2), -((net->h - sized2.h)/2), net->w, net->h);
//resize_network(net, sized.w, sized.h);
layer l = net->layers[net->n-1];
float *X = sized.data;
time=what_time_is_it_now();
network_predict(net, X);
printf("%s: Predicted in %f seconds.\n", input, what_time_is_it_now()-time);
int nboxes = 0;
detection *dets = get_network_boxes(net, im.w, im.h, thresh, hier_thresh, 0, 1, &nboxes);
//printf("%d\n", nboxes);
//if (nms) do_nms_obj(boxes, probs, l.w*l.h*l.n, l.classes, nms);
if (nms) do_nms_sort(dets, nboxes, l.classes, nms);
draw_detections(im, dets, nboxes, thresh, names, alphabet, l.classes);
free_detections(dets, nboxes);
if(outfile)
{
save_image(im, outfile);
}
else{
//save_image(im, "predictions");
char image[2048];
sprintf(image,"./data/predict/%s",GetFilename(filename));
save_image(im,image);
printf("predict %s successfully!\n",GetFilename(filename));
#ifdef OPENCV
cvNamedWindow("predictions", CV_WINDOW_NORMAL);
if(fullscreen){
cvSetWindowProperty("predictions", CV_WND_PROP_FULLSCREEN, CV_WINDOW_FULLSCREEN);
}
show_image(im, "predictions");
cvWaitKey(0);
cvDestroyAllWindows();
#endif
}
free_image(im);
free_image(sized);
if (filename) break;
}
else {
printf("Enter Image Path: ");
fflush(stdout);
input = fgets(input, 256, stdin);
if(!input) return;
strtok(input, "\n");
list *plist = get_paths(input);
char **paths = (char **)list_to_array(plist);
printf("Start Testing!\n");
int m = plist->size;
if(access("./data/out",0)==-1)//"/home/FENGsl/darknet/data"修改成自己的路径
{
if (mkdir("./data/out",0777))//"/home/FENGsl/darknet/data"修改成自己的路径
{
printf("creat file bag failed!!!");
}
}
for(i = 0; i < m; ++i){
char *path = paths[i];
image im = load_image_color(path,0,0);
image sized = letterbox_image(im, net->w, net->h);
//image sized = resize_image(im, net->w, net->h);
//image sized2 = resize_max(im, net->w);
//image sized = crop_image(sized2, -((net->w - sized2.w)/2), -((net->h - sized2.h)/2), net->w, net->h);
//resize_network(net, sized.w, sized.h);
layer l = net->layers[net->n-1];
float *X = sized.data;
time=what_time_is_it_now();
network_predict(net, X);
printf("Try Very Hard:");
printf("%s: Predicted in %f seconds.\n", path, what_time_is_it_now()-time);
int nboxes = 0;
detection *dets = get_network_boxes(net, im.w, im.h, thresh, hier_thresh, 0, 1, &nboxes);
//printf("%d\n", nboxes);
//if (nms) do_nms_obj(boxes, probs, l.w*l.h*l.n, l.classes, nms);
if (nms) do_nms_sort(dets, nboxes, l.classes, nms);
draw_detections(im, dets, nboxes, thresh, names, alphabet, l.classes);
free_detections(dets, nboxes);
if(outfile){
save_image(im, outfile);
}
else{
char b[2048];
sprintf(b,"./data/out/%s",GetFilename(path));//"/home/FENGsl/darknet/data"修改成自己的路径
save_image(im, b);
printf("save %s successfully!\n",GetFilename(path));
#ifdef OPENCV
cvNamedWindow("predictions", CV_WINDOW_NORMAL);
if(fullscreen){
cvSetWindowProperty("predictions", CV_WND_PROP_FULLSCREEN, CV_WINDOW_FULLSCREEN);
}
show_image(im, "predictions");
cvWaitKey(0);
cvDestroyAllWindows();
#endif
}
free_image(im);
free_image(sized);
if (filename) break;
}
}
}
}
void run_detector(int argc, char **argv)
{
char *prefix = find_char_arg(argc, argv, "-prefix", 0);
float thresh = find_float_arg(argc, argv, "-thresh", .5);
float hier_thresh = find_float_arg(argc, argv, "-hier", .5);
int cam_index = find_int_arg(argc, argv, "-c", 0);
int frame_skip = find_int_arg(argc, argv, "-s", 0);
int avg = find_int_arg(argc, argv, "-avg", 3);
if(argc < 4){
fprintf(stderr, "usage: %s %s [train/test/valid] [cfg] [weights (optional)]\n", argv[0], argv[1]);
return;
}
char *gpu_list = find_char_arg(argc, argv, "-gpus", 0);
char *outfile = find_char_arg(argc, argv, "-out", 0);
int *gpus = 0;
int gpu = 0;
int ngpus = 0;
if(gpu_list){
printf("%s\n", gpu_list);
int len = strlen(gpu_list);
ngpus = 1;
int i;
for(i = 0; i < len; ++i){
if (gpu_list[i] == ',') ++ngpus;
}
gpus = calloc(ngpus, sizeof(int));
for(i = 0; i < ngpus; ++i){
gpus[i] = atoi(gpu_list);
gpu_list = strchr(gpu_list, ',')+1;
}
} else {
gpu = gpu_index;
gpus = &gpu;
ngpus = 1;
}
int clear = find_arg(argc, argv, "-clear");
int fullscreen = find_arg(argc, argv, "-fullscreen");
int width = find_int_arg(argc, argv, "-w", 0);
int height = find_int_arg(argc, argv, "-h", 0);
int fps = find_int_arg(argc, argv, "-fps", 0);
//int class = find_int_arg(argc, argv, "-class", 0);
char *datacfg = argv[3];
char *cfg = argv[4];
char *weights = (argc > 5) ? argv[5] : 0;
char *filename = (argc > 6) ? argv[6]: 0;
if(0==strcmp(argv[2], "test")) test_detector(datacfg, cfg, weights, filename, thresh, hier_thresh, outfile, fullscreen);
else if(0==strcmp(argv[2], "train")) train_detector(datacfg, cfg, weights, gpus, ngpus, clear);
else if(0==strcmp(argv[2], "valid")) validate_detector(datacfg, cfg, weights, outfile);
else if(0==strcmp(argv[2], "valid2")) validate_detector_flip(datacfg, cfg, weights, outfile);
else if(0==strcmp(argv[2], "recall")) validate_detector_recall(datacfg,cfg, weights);
else if(0==strcmp(argv[2], "demo")) {
list *options = read_data_cfg(datacfg);
int classes = option_find_int(options, "classes", 20);
char *name_list = option_find_str(options, "names", "data/names.list");
char **names = get_labels(name_list);
demo(cfg, weights, thresh, cam_index, filename, names, classes, frame_skip, prefix, avg, hier_thresh, width, height, fps, fullscreen);
}
//else if(0==strcmp(argv[2], "extract")) extract_detector(datacfg, cfg, weights, cam_index, filename, class, thresh, frame_skip);
//else if(0==strcmp(argv[2], "censor")) censor_detector(datacfg, cfg, weights, cam_index, filename, class, thresh, frame_skip);
}
./darknet detector test cfg/voc.data cfg/yolov3-voc.cfg backup/yolov3-voc_final.weights
layer filters size input output
0 conv 32 3 x 3 / 1 416 x 416 x 3 -> 416 x 416 x 32 0.299 BFLOPs
1 conv 64 3 x 3 / 2 416 x 416 x 32 -> 208 x 208 x 64 1.595 BFLOPs
.......
104 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
105 conv 255 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 255 0.353 BFLOPs
106 detection
Loading weights from yolov3.weights...Done!
Enter Image Path:
这里让输入图像路径,一个txt保存的路径即可,我在这里输入的是之前生成的2007_test.txt

5. Python接口
darknet提供了python接口,直接使用python即可调用程序得到检测结果,python接口在`./darknet/python`文件夹中,调用的是编译时生成的libdarknet.so文件,不同的机器平台编译生成的文件不一样,如果换机器或使用cpu或gpu运行时,请重新编译一下。
该文件有两个文件夹:darknet.py 与provertbot.py,目前的版本支持python2.7,适当修改代码使其支持python3.x,个人做好的api已上传到github上,方便使用。
python darknet.py输出结果形式为: res.append((meta.names[i], dets[j].prob[i], (b.x, b.y, b.w, b.h)))
依次为检测出物体的名称,概率,检测框大小范围(在原图中所处的位置),其中x,y表示方框中心,w和h分别表示中心到两边的宽度和高度,如下图所示:
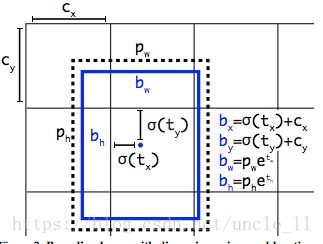
本人的api对其进行了更改,输出的是方框的横纵坐标的范围(x1,x2,y1,y2),且个人只分三类,区分服装上衣,下衣及全身装。读者有需要的话只需修改你训练的model位置及配置文件cfg即可。
https://github.com/UncleLLD/img-detect-yolov3
7. 计算MAP和recall
1.生成检测结果文件
./darknet detector valid cfg/car.data cfg/car.cfg backup/car_final.weights -out car.txt -gpu 0 -thresh .52.把car.txt 用faster rcnn 中voc_eval计算mAP
/home/sam/src/caffeup2date_pyfasterrcnn/lib/datasets/compute_mAP.py
from voc_eval import voc_eval
print(voc_eval('/home/sam/src/darknet/results/{}.txt',/home/sam/datasets/car2/VOC2007/Annotations/{}.xml','/home/sam/datasets/car2/VOC2007/ImageSets/Main/test.txt', 'car', '.')第三个结果就是
如果只想计算大于0.3的输出结果的mAP,把 voc_eval.py文件中如下代码更改
sorted_ind = np.argsort(-confidence)
sorted_ind1 = np.where(confidence[sorted_ind] >= .3)[0]#np.argsort(-confidence<=-.3)
sorted_ind = sorted_ind[sorted_ind1]3.计算recall
./darknet detector recall cfg/car.data cfg/car.cfg backup/car_final.weights -out car.txt -gpu 0 -thresh .57.参考
YOLO V3
参考:
* YOLOv3训练自己的VOC数据集(配置及训练)
*YOLOv3批量测试图片并保存在自定义文件夹下(批量测试)
注:文件夹内容保存图片命名问题,*GetFilename(char *p)函数中限制了文件名长度,修改即可
* YOLOv3 ubuntu 配置及训练自己的VOC格式数据集(配置及训练)
* YOLOv3: 训练自己的数据(训练为主,部分测试问题可以参考)
* YOLO 网络终端输出参数意义
英文:https://timebutt.github.io/static/understanding-yolov2-training-output/
中文:https://blog.csdn.net/dcrmg/article/details/78565440
* yolo官方文档:https://pjreddie.com/darknet/yolo/
YOLO V2
参考:
* YOLOv2训练自己数据集的一些心得----VOC格式 (可视化)
* YOLOv2训练自己的数据集
* 使用YOLO v2训练自己的数据
后续待完善...