CNN—卷积神经网络
目录
- 1、卷积神经网络
- 2、基本操作
- 4、pooling层BP
- 5、im2col
- 6、code
1、卷积神经网络
卷积神经网络(convolutional neural network)是利用模型特性来处理掉输入的波动而获得不变性特征,由LeCun提出,目前广泛的应用于图像数据。
2、基本操作
卷积操作主要是f(x)g(x)在重合区域的积分。
- 一维卷积 如下图所示,是一维卷积。类似于点积,y=x∗w ,下图的w=[1,0,-1]。这里引入了一个概念局部接受野(local receptive fields)和权值共享(weight sharing)。为了方便表述,灰色的是隐含层i,黄色是下一层隐含层i+1。对于传统的神经网络而言,i+1层的一个神经元是接收了i层所有神经元节点的加权求和得到的,而这里,则仅接收i层神经元局部输入的加权得到,也就是局部接受野的概念。而权值共享,指的是对于i+1层的每一个神经元用的权重w是同一个。原来是7个输入5个输出的话,那么需要w是75=35个参数,如果使用局部接受野,输入变为了3,则需要w是35=15个参数。如果再使用权值共享,那么就变成了3个参数!使得整个网络的参数大为减少。
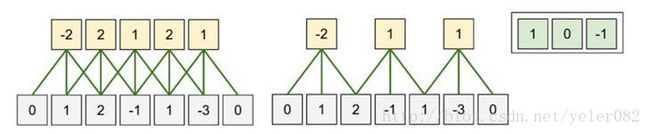
当然,i层可以对应多个i+1层,也就是每一个共享的w得到一个i+1层,多个共享的w就得到了多个i+1层,这个数一般称之为feature map数。这样可以学习到更多的特征。 这样能够更好的表达局部特征!而通过不断的深度,使得局部特征聚合为高级特征 - 二维卷积
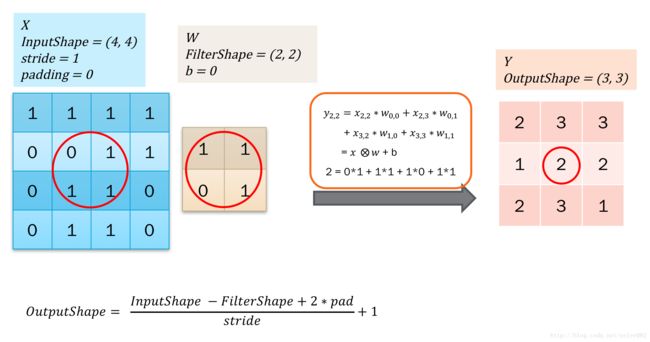
我们采用的卷积层是3x3的一个区域,在这个区域里每个方格的权重如下{{1,0,1},{0,1,0},{1,0,1}} 对应的点位置与原图像点进行乘积求和。 三维卷积

目前多数都是采用3d卷积,本质跟2d卷积一样。就是维度增加了,对应的输入变为了4维,而w也是4维的,这样卷积求和得到输出。除了卷积之外,cnn还有一个核心的概念,子抽样(subsampling),一般用pooling来表示。pooling的种类有很多种,主要是用一个特征来表达一个局部特征,这样使得参数大为减少。常见的有max pooling和mean pooling,L2 pooling。max pooling就是用局部特征的最大值来表达这个区域的特征。其他依次类推。如下图所示:
另外,对于图像里的一些其他操作,比如stride,表示卷积每次的移动步长,pad表示对图像进行阔边,防止在卷积操作中丢失边界特征。
3、卷积的BP
卷积的BP推导可以概括为3个卷积。具体如下: 这里我们以2d卷积为例子,3d卷积的话,就是在2d上增加一个循环就可以了。 如下图所示:
这是一个forward过程,就是第二部分提到的卷积操作。这里仅用大O里面加个x表示卷积,注意后者是卷积核,也就是filter或者说weight。
那么误差反馈就比较容易,首先是得到了上层传递过来的delta,之后对输入的x求导得到dx用于反馈误差。之后对w求导,得到dw,用于更新梯度。 这个比较简单,因为本质都是点积,只需要对应的求导再加和就可以了。如下图所示:
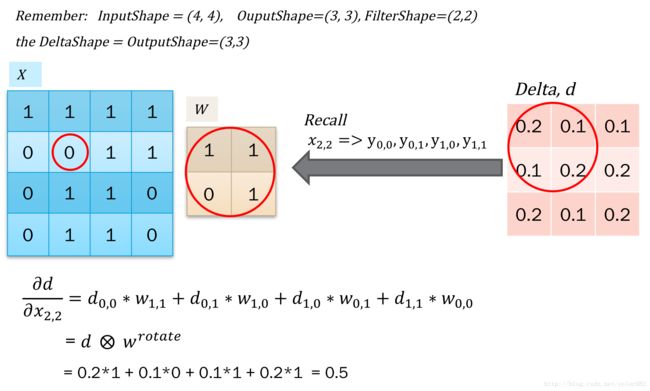
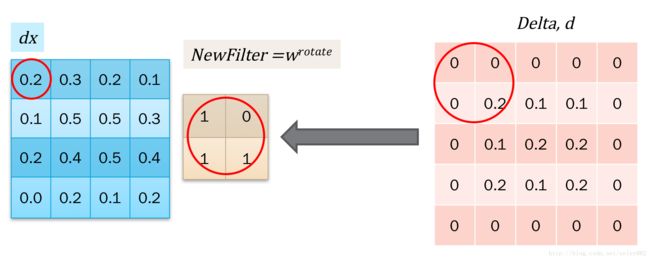
对应的求解,发现这个操作类似于卷积。但是对于x0,0的求解,需要对delta进行阔边以方便直接使用卷积操作。如下图所示:
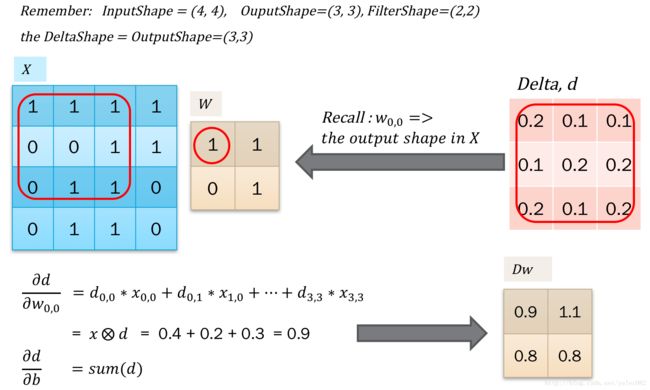
接下来是对w求导,得到更新梯度。计算也是一样的,找到w参与的点积计算,拿到导数合并一下就可以了。如下图所示,我们发现同样可以用卷积操作来表示:
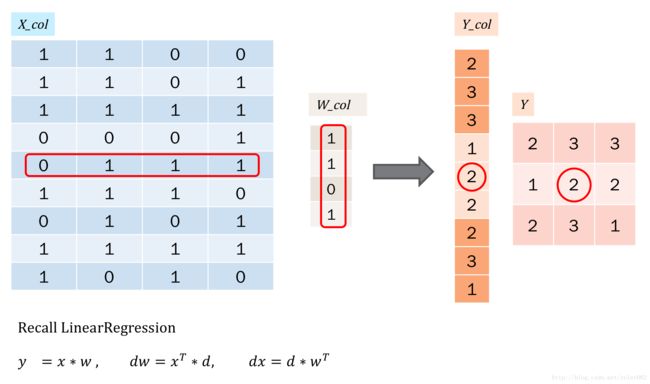
那么我们可以联系到线性回归,以方便我们记忆了:
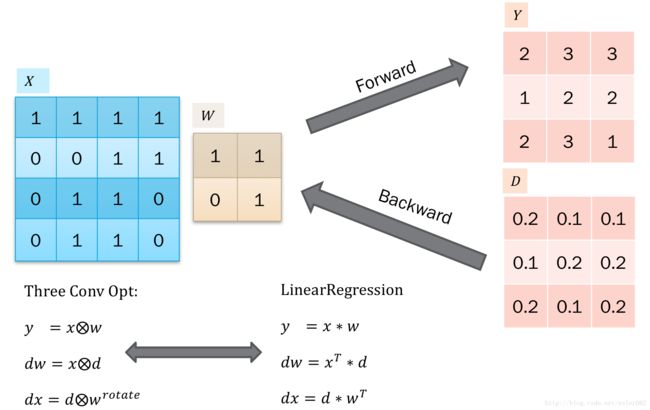
以上就是关于卷积BP的推导和证明了。 此外,我们看到也能看到对于5*5的卷积操作,其实是可以用2个3*3的卷积操作来代替,同时还能达到层数更多的效果。目前通过可视化来看,深度学习的特征是层级式的,特征由低级不断的汇总为高级特征。
4、pooling层BP
对于pooling层,如何进行BP操作呢?pooling层比卷积层简单的地方是,pooling是没有参数的,所以只需要得到dx之后用于误差传递就可以了。对于mean pooling,其实相当于卷积都是均值,比如2*2的pooling,那么w就相当于[[0.25, 0.25],[0.25, 0.25]],我们直接套用卷积的公式就可以了。而对于L2 pooling等等类似的pooling,其实是可以拆分成平方操作,sum pooling,再开方的三个操作分别传递误差就可以,而sum pooling也可以套用卷积操作。唯一不一样的是max pooling,没有固定的卷积核,所以需要循环一下,对于输入最大的点进行求导。pooling 如下图所示:
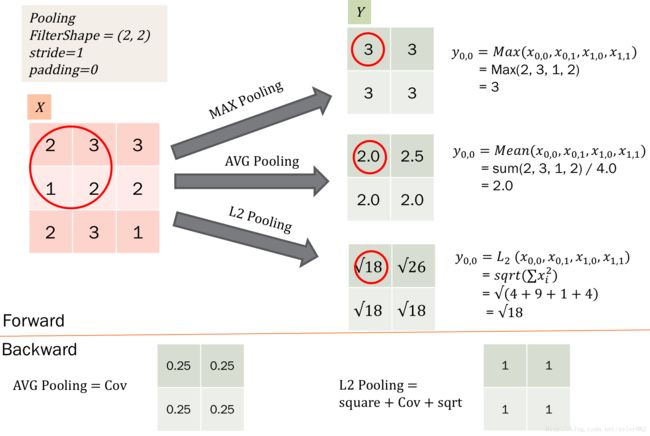
从max 和 mean等操作也可以看到,pooling的不同。 pooling的本质是一种局部特征的表达。max pooling的是用图像某一区域像素值的最大值来表示该区域的特征,而mean pool是用图像某一区域像素值的均值来表示该区域的特征。这两个pooling操作都提高了提取特征的不变性,而特征提取的误差主要来自两个方面:
邻域大小受限造成的估计值方差增大;
卷积层参数误差造成估计均值的偏移。
一般来说,mean-pooling能减小第一种误差,更多的保留图像的背景信息,max-pooling能减小第二种误差(导数不影响其他点),更多的保留纹理信息。在图像处理中,使用max pooling多于mean pooling。
5、im2col
实际在计算的卷积的时候,通常可以使用一些卷积操作库。在类比线性回归的时候,也容易想到,如果把二维的卷积核w转为一维的话,操作会不会更快?因为在误差反馈的时候,不需要再重复的循环。因此,有一种方式是把二维图像转为一维向量进行计算的方式。如下图所示:
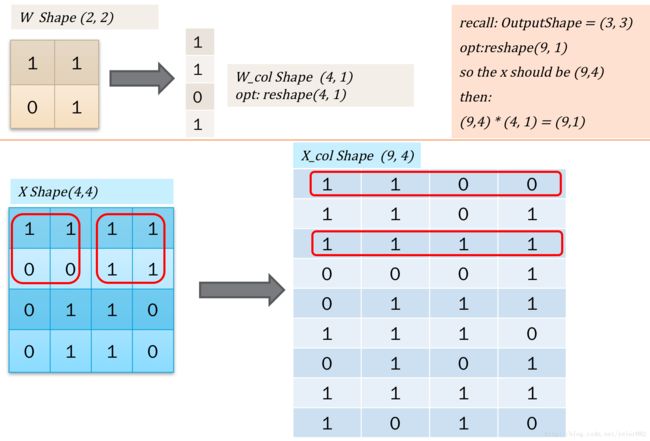
简单的说,就是把操作转为向量的形式。那么计算就和线性回归一样了,如下:
对于误差反馈,我们还需要把反馈的误差,再转回到二维图像的形式,也就是col2im,如下图所示:
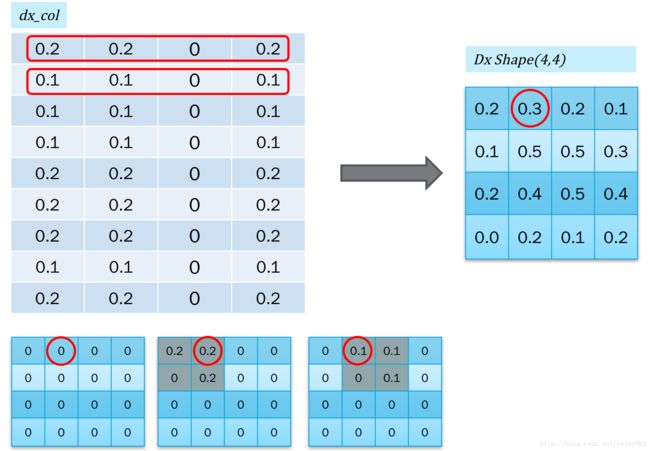
转换的时候,是不断的累加的。
6、完整网络结构
卷积神经网络中的每一个特征提取层(C-层)都紧跟着一个 用来求局部平均与二次提取的计算层(S-层),这种特有的两次特征提取结构使网络在识别时对输入样本有较高的畸变容忍能力。
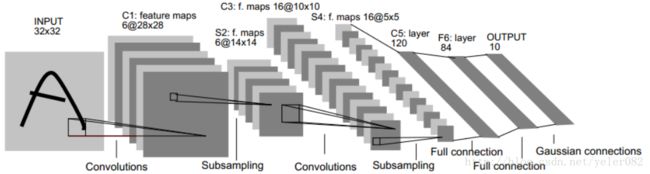
卷积层C1:
输入是32x32,C1层有6个特征图(也就是有6个卷积核),每个卷积核大小是5x5,所以特征图大小就是(32-5+1)^2=28x28;
参数数目:(5x5+1个bias)x6个卷积核
连接数目:(5x5+1)x(28x28)x6
采样层S2:
6个14x14的特征图,每个特征图中的每个单元与C1中的2x2邻域相连,不重叠。
S2层每个单元的4个输入相加,乘以一个训练参数w,再加一个偏置b,通过sigmoid函数计算;
参数:因为局部参数共享,(1+1)x6=12个
连接数:(2x2+1)x14x14x6
卷积层C3:
16个卷积核,每个特征图大小是10x10,卷积核大小是5x5;
每个特征图中的每个神经元与S2中的某几个层的多个5x5的邻域相连。比如,第0张特征图中的每个节点与S2中的第0、1、2张特征图总共3个5x5的节点相连。
【Question】这个是如何连接?是否有理论可循?
采样层S4:同S2对C1
卷积层C5,全连接:
120个神经元,可以看做120个特征图,每个特征图的大小是1x1;
每个单元与S4层的全部16个单元的5x5域相连;
连接数=可训练参数:(16x5x5+1)x120
F6层:
84(这个数字源自输出层的设计)个单元,与C5层全连接;
F6层计算输入向量和权重向量之间的点积,再加上一个偏置;
连接数=训练参数:(120+1)x84
输出层采用欧式径向基函数单元:
给定一个输入模式,损失函数应使得F6的配置模式的期望分类足够接近;
每类一个单元,每个单元连接84个输入;
7、code
这里简单的给一下卷积的部分code。网上有很多好的代码值得参考和学习,这里就是配合上面的截图,给关键的几个函数。
class ConvLayer(ParamLayer):
def __init__(self, shape, pad_w=0, pad_h=0, stride=1,
name="ConvLayer", init_method="random", debug=0):
'''
shape (input_channel, filter_size, filter_size, output_channel)
c: channel
f: filter_size
b: batch_size
w: width
h: height
'''
super(ConvLayer, self).__init__(name, shape, init_method)
self.in_channel = shape[0]
self.filter_h = shape[1]
self.filter_w = shape[2]
self.out_channel = shape[3]
self.indx = self.filter_h * self.filter_w * self.in_channel
self.pad_h = pad_h
self.pad_w = pad_w
self.stride = stride
self.debug = debug
def forward(self, x):
'''
x shape: (batch_size, channel, height, weight)
'''
# get the output shape
self.batch_size, in_channel, in_h, in_w = x.shape
assert in_channel == self.in_channel
out_h = (in_h + 2 * self.pad_h - self.filter_h) / self.stride + 1
out_w = (in_w + 2 * self.pad_w - self.filter_w) / self.stride + 1
assert out_h % 1 == 0
assert out_w % 1 == 0
out_h, out_w = int(out_h), int(out_w)
# pad input array
x_padded = np.pad(x, ((0,0), (0,0), (self.pad_h, self.pad_h),
(self.pad_w, self.pad_w)), 'constant')
self.h_padded, self.w_padded = x_padded.shape[2], x_padded.shape[3]
# im2col, (out_h*out_w*batch_size, filter_h*filter_w*in_channel)
x_cols = None
for i in xrange(self.filter_h, self.h_padded+1, self.stride):
for j in xrange(self.filter_w, self.w_padded+1, self.stride):
for n in xrange(self.batch_size):
tmp = x_padded[n, :, i-self.filter_h:i, j-self.filter_w:j]
field = tmp.reshape((1, self.indx))
if x_cols is None:
x_cols = field
else:
x_cols = np.vstack((x_cols, field))
self.input = x_cols
# weight2col, (indx, out_channel)
self.w_cols = self.W.reshape(self.indx, self.out_channel)
# output_col shape, out_h*out_w*batch_size, out_channel
self.output_col = np.dot(self.input, self.w_cols) + self.b
# output shape, (batch_size, channel, height, weight)
self.output = self.output_col.reshape(self.batch_size, out_h,
out_w, self.out_channel)
if self.debug:
print "x_cols.shape = ", x_cols.shape
print "w_cols.shape = ", self.w_cols.shape
print "output.shape = ", self.output.shape
def backward(self, delta):
assert delta.size == self.output.size
delta_cols = delta.reshape(self.output_col.shape)
# grad_x_cols, (out_h*out_w*batch_size, indx)
grad_x_cols = np.dot(delta_cols, self.w_cols.T)
# get the grad
grad_w = np.dot(self.input.T, delta_cols)
grad_b = np.sum(delta_cols, axis=0)
self.grad =[grad_w.reshape(self.W.shape), grad_b.reshape(self.b.shape)]
# col2im: convert back from x_cols to x
# (batch_size, channel, height, weight)
dx_padded = np.zeros((self.batch_size, self.in_channel,
self.h_padded, self.w_padded))
idx = 0
tmp_shape = (1, self.in_channel, self.filter_h, self.filter_w)
for i in xrange(self.filter_h, self.h_padded+1, self.stride):
for j in xrange(self.filter_w, self.w_padded+1, self.stride):
for n in xrange(self.batch_size):
tmp = grad_x_cols[idx,:].reshape(tmp_shape)
dx_padded[n:n+1, :,
i - self.filter_h:i,
j - self.filter_w:j] += tmp
idx += 1
if self.pad_h == 0:
self.delta = dx_padded
else:
self.delta = dx_padded[:, :, self.pad_h:-self.pad_h,
self.pad_w:-self.pad_w]
# debug
if self.debug:
print "grad_w.shape = ", self.grad[0].shape
print "delta.shape = ", self.delta.shape