深入理解卷积神经网络(CNN)——从原理到实现
王琦 QQ:451165431 计算机视觉&深度学习
转载请注明出处 :http://blog.csdn.net/Rainbow0210/article/details/78562926。
本篇通过在MNIST上的实验,引出卷积神经网络相关问题,详细阐释其原理以及常用技巧、调参方法。欢迎讨论相关技术&学术问题,但谢绝拿来主义。
代码是博主自己写的,因为倾向于详细阐述底层原理,所以没有用TensorFlow等主流DL框架。实验结果与TF等框架可能稍有不同,其原因在于权重初始化方式的差异等,但并不影响对于网络的本质的理解。
实验概述
数据集
- MNIST:0-9共10个数字,其中,60000条训练样本,10000条测试样本,每条样本分辨率为 28×28 。拉伸为 1 维向量,因而为 28×28=784 维。
实验平台
- Python 2.7
实验内容
通过CNN完成对MNIST数据集的分类。具体有需要实现一下三部分:
- 卷积层:实现卷积层,包含 Conv2D, Relu, AvgPooled2D,其中,Relu 在作业一中已经实现
- 可视化:实现 第一个卷积层的可视化(经过 Relu 激活之后)
- 损失函数:实现 SoftmaxCrossEntropyLoss
实验原理
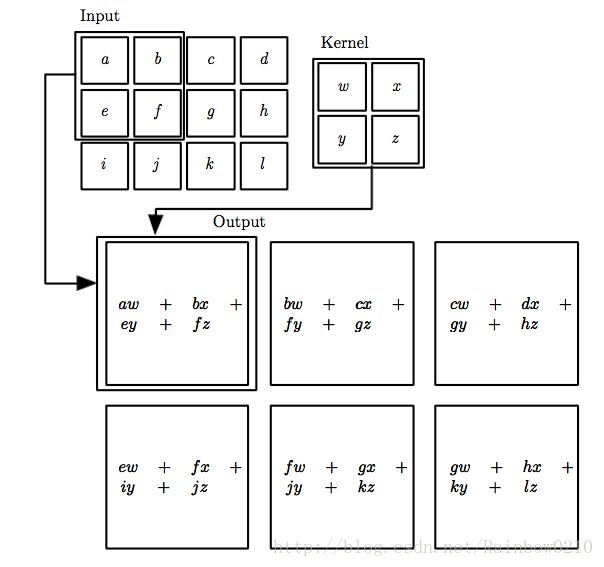
二维卷积 Conv2D
对于两个二维矩阵 I,K ,其卷积的数学表述为:
其中, ∗ 表示卷积运算, ⋅ 表示点积。卷积运算满足交换律:
由于在CNN中,卷积核往往是通过优化学习得到的,所以一般来讲,卷积和相关性是等价的:
下图为相关性计算的示意图,卷积则只需将Kernel旋转 180∘ 即可:
池化 Pooling
将特征分为若干个相交/不相交的区域,再在每个区域上通过计算其最大值 (max-pooling) /均值 (average-pooling),得到其池化特征。下图为最大池化 (max-pooling)的示意图:

罗杰斯特回归 Logistic Regression
对于一个二分类问题,设有两类 ω0,ω1 ,标签分别为 0,1 ,相应的网络只有一个输出神经元,则:
其中, x 是样本, t∈(0,1) 是标签。对于包含 N 个独立同分布样本的数据集,记样本为 x(n) ,对应的标签为 t(n) ,有:
由于样本满足独立同分布,所以
通过最大似然原理,使得上述概率密度最大,也就是使得下式取得最小(误差函数):
其中, E(θ)(n) 为交叉熵误差函数 (Cross-entropy Error Function),定义如下:
对于网络的训练阶段,是寻找合适的 θ 最小化上述损失函数;在网络的预测阶段,若 P(t=1∣x)>P(t=0∣x) ,则预测为 ω1 ,否则为 ω0 。
Softmax 回归 Softmax Regression
对于 K 分类问题( K>2 ),标签为 K 位的 0−1 形式,即属于第 i 类,则第 i 位为 1 ,其他位为 0 。和罗杰斯特回归类似,定义:
优化目标为:寻找一个合适的 θ ,使得:
- 当 x∈ωk 时, P(tk=1∣x,θ) 尽可能大
- 当 x∉ωk 时, P(tk=1∣x,θ) 尽可能小
Softmax 函数:
值得注意的是:
与罗杰斯特回归类似,可以定义包含 N 个样本的似然函数:
同样,可以得到交叉熵损失函数:
其中, E(θ)(n) 为交叉熵误差函数 (Cross-entropy Error Function),定义如下:
对于网络的训练阶段,是寻找合适的 θ 最小化上述损失函数;在网络的预测阶段,若 P(ti∣x)=maxjP(tj∣x) ,则预测为第 i 类。
卷积神经网络
其与全连接网络的主要区别在于:权值共享、局部互连、池化。在计算机视觉 (CV) 和自然语言处理 (NLP) 领域均有着广泛的应用。
前向传播
- 卷积层 Convolutional Layer:
y(l+1)p=σ(y(l)p∗w(l)p+bp)
其中, σ 是激活函数,在卷积神经网络中,常用 relu 激活函数:
σ(x)=max(x,0) - 池化层 Pooling Layer:
y(l+1)p=pooling(y(l)p) - 全连接层 Fully Connected Layer:
y(l+1)=σ(y(l)⋅w(l)+b(l))
若该全连接层为网络的最后一层,则激活函数通常为Softmax(Cross-entropy)或者Sigmoid(MSE)。
反向传播
- 误差函数:
对于包含 N 个样本的数据集,定义误差函数:
E=∑n=1NE(n)
其中, E(n) 是第 n 个样本的误差函数。
- MSE:
E(n)=12∑k=1K(tk−y(L)k)2 - Cross-entropy:
E(n)=−∑k=1Ktk⋅lny(L)k
- MSE:
权值更新:
w(l)j,i b(l)j==w(l)j,i−η⋅∂E∂w(l)j,ib(l)j−η⋅∂E∂b(l)j权值衰减:
定义代价函数:
J=E+λ2⋅∑i,j,l(w(l)j,i)2
此时权值更新应为:w(l)j,i b(l)j==w(l)j,i−η⋅∂J∂w(l)j,i=w(l)j,i−η⋅∂E∂w(l)j,i−λ⋅η⋅w(l)j,ib(l)j−η⋅∂J∂b(l)j=b(l)j−η⋅∂E∂b(l)j局部梯度:
定义局部梯度:
δ(l)j=∂E(n)∂u(l)j
值得注意的是,逐层梯度的传导:
∂y(l)i∂y(l−1)j=∑k=1m∂y(l)i∂u(l)k⋅∂u(l)k∂y(l−1)j具体计算:
Convolutional Layer:
简单起见,以一维卷积为例,我们计算下图的梯度: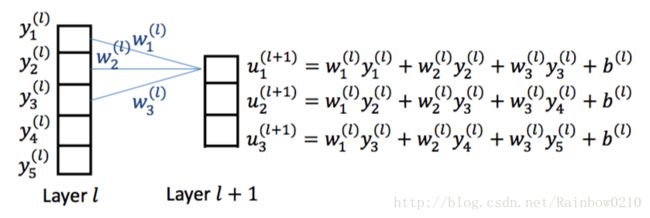
如图所示,网络的前一层有 5 个节点,后一层有 3 个节点,卷积核大小为 3 ,对应的运算关系如图。则可以得到局部梯度:
δ(l)1 δ(l)2 ===∂E(n)∂u(l)1=∂E(n)∂u(l+1)1⋅∂u(l+1)1∂y(l)1⋅∂y(l)1∂u(l)1=δl+11⋅w(l)1⋅σ′(u(l)1)∂E(n)∂u(l)2=∂E(n)∂u(l+1)1⋅∂u(l+1)1∂y(l)2⋅∂y(l)2∂u(l)2+∂E(n)∂u(l+1)2⋅∂u(l+1)2∂y(l)2⋅∂y(l)2∂u(l)2δl+11⋅w(l)2⋅σ′(u(l)2)+δl+12⋅w(l)1⋅σ′(u(l)2)同理可以计算 δ(l)3,δ(l)4,δ(l)5 。得到如下结论:
δ(l)=(δ(l+1)∗wl)⋅(σ′(u(l)))
权值 w(l) 的梯度:∂E(n)∂w(l)1 ∂E(n)∂w(l)2 ∂E(n)∂w(l)3===∑i=13∂E(n)∂u(l+1)i⋅∂u(l+1)i∂w(l)1=δ(l+1)1⋅y(l)1+δ(l+1)2⋅y(l)2+δ(l+1)3⋅y(l)3∑i=13∂E(n)∂u(l+1)i⋅∂u(l+1)i∂w(l)2=δ(l+1)1⋅y(l)2+δ(l+1)2⋅y(l)3+δ(l+1)3⋅y(l)4∑i=13∂E(n)∂u(l+1)i⋅∂u(l+1)i∂w(l)3=δ(l+1)1⋅y(l)3+δ(l+1)2⋅y(l)4+δ(l+1)3⋅y(l)5得到如下结论:
∂E(n)∂w(l) ∂E(n)∂b(l)==y(l)∗δ(l+1)∑i=13∂E(n)∂u(l+1)i⋅∂u(l+1)i∂b(l)=∑i=13δ(l+1)iAverage Pooling Layer:

以上图为例,推倒局部梯度的计算:
δ(l)1 δ(l)2==∂E(n)∂u(l)1=∂E(n)∂u(l+1)1⋅∂u(l+1)1∂y(l)1⋅∂y(l)1∂u(l)1=δ(l+1)1⋅12⋅σ′(u(l)1)∂E(n)∂u(l)2=∂E(n)∂u(l+1)1⋅∂u(l+1)1∂y(l)2⋅∂y(l)2∂u(l)2=δ(l+1)1⋅12⋅σ′(u(l)2)同理可得:
δ(l)3=δl+12⋅12⋅σ′(u(l)3) δ(l)4=δl+12⋅12⋅σ′(u(l)4)Max Pooling Layer:

以上图为例,推倒局部梯度的计算:
- 若 y(l)1≥y(l)2 ,
δ(l)1 δ(l)2==∂E(n)∂u(l)1=∂E(n)∂u(l+1)1⋅∂u(l+1)1∂y(l)1⋅∂y(l)1∂u(l)1=δl+11⋅σ′(u(l)1)∂E(n)∂u(l)2=0 否则
δ(l)1 δ(l)2==∂E(n)∂u(l)1=0∂E(n)∂u(l)2=δl+11⋅σ′(u(l)2)若 y(l)3≥y(l)4 ,
δ(l)3 δ(l)4==∂E(n)∂u(l)3=∂E(n)∂u(l+1)2⋅∂u(l+1)2∂y(l)3⋅∂y(l)3∂u(l)3=δl+12⋅σ′(u(l)3)∂E(n)∂u(l)4=0- 否则
δ(l)3 δ(l)4==∂E(n)∂u(l)3=0∂E(n)∂u(l)4=δl+12⋅σ′(u(l)4)
不妨假设 y(l)1≥y(l)2,y(l)3≥y(l)4 ,则:
δ(l)1 δ(l)2 δ(l)3 δ(l)4====δl+11⋅σ′(u(l)1)0δl+12⋅σ′(u(l)3)0- 若 y(l)1≥y(l)2 ,
代码实现
损失函数 SoftmaxCrossEntropyLoss
class SoftmaxCrossEntropyLoss(object):
def __init__(self, name):
self.name = name
self.h = None
def forward(self, input, target):
exp_input = np.exp(input)
sum = np.sum(exp_input, axis=1)
h = np.divide(exp_input.T, sum).T
self.h = h
return np.mean(np.sum(- target * np.log(h), axis=1))
def backward(self, input, target):
return (self.h - target) / len(input)
卷积层
class Conv2D(Layer):
def __init__(self, name, in_channel, out_channel, kernel_size, pad, init_std):
super(Conv2D, self).__init__(name, trainable=True)
self.kernel_size = kernel_size
self.pad = pad
self.W = np.random.randn(out_channel, in_channel, kernel_size, kernel_size) * init_std
self.b = np.zeros(out_channel)
self.diff_W = np.zeros(self.W.shape)
self.diff_b = np.zeros(out_channel)
def forward(self, input):
self._saved_for_backward(input)
output = conv2d_forward(input, self.W, self.b, self.kernel_size, self.pad)
return output
def backward(self, grad_output):
input = self._saved_tensor
grad_input, self.grad_W, self.grad_b = conv2d_backward(input, grad_output, self.W, self.b, self.kernel_size, self.pad)
return grad_input
def update(self, config):
mm = config['momentum']
lr = config['learning_rate']
wd = config['weight_decay']
self.diff_W = mm * self.diff_W + (self.grad_W + wd * self.W)
self.W = self.W - lr * self.diff_W
self.diff_b = mm * self.diff_b + (self.grad_b + wd * self.b)
self.b = self.b - lr * self.diff_b池化层
class AvgPool2D(Layer):
def __init__(self, name, kernel_size, pad):
super(AvgPool2D, self).__init__(name)
self.kernel_size = kernel_size
self.pad = pad
def forward(self, input):
self._saved_for_backward(input)
output = avgpool2d_forward(input, self.kernel_size, self.pad)
return output
def backward(self, grad_output):
input = self._saved_tensor
grad_input = avgpool2d_backward(input, grad_output, self.kernel_size, self.pad)
return grad_input相关函数
def conv2d_forward(input, W, b, kernel_size, pad):
'''
Args:
input: shape = n (#sample) x c_in (#input channel) x h_in (#height) x w_in (#width)
W: weight, shape = c_out (#output channel) x c_in (#input channel) x k (#kernel_size) x k (#kernel_size)
b: bias, shape = c_out
kernel_size: size of the convolving kernel (or filter)
pad: number of zero added to both sides of input
Returns:
output: shape = n (#sample) x c_out (#output channel) x h_out x w_out,
where h_out, w_out is the height and width of output, after convolution
'''
h_out = input.shape[2] + 2 * pad - kernel_size + 1
w_out = input.shape[3] + 2 * pad - kernel_size + 1
c_out = W.shape[0]
c_in = W.shape[1]
input_col2 = im2col_cython(input, kernel_size, kernel_size, pad, 1)
input_col2 = input_col2.T.reshape(h_out, w_out, input.shape[0], -1)
w_col = W.reshape((c_out, c_in * kernel_size * kernel_size))
output = np.dot(input_col2, w_col.T ) + b
return output.transpose(2, 3, 0, 1)
def conv2d_backward(input, grad_output, W, b, kernel_size, pad):
'''
Args:
input: shape = n (#sample) x c_in (#input channel) x h_in (#height) x w_in (#width)
grad_output: shape = n (#sample) x c_out (#output channel) x h_out x w_out
W: weight, shape = c_out (#output channel) x c_in (#input channel) x k (#kernel_size) x k (#kernel_size)
b: bias, shape = c_out
kernel_size: size of the convolving kernel (or filter)
pad: number of zero added to both sides of input
Returns:
grad_input: gradient of input, shape = n (#sample) x c_in (#input channel) x h_in (#height) x w_in (#width)
grad_W: gradient of W, shape = c_out (#output channel) x c_in (#input channel) x k (#kernel_size) x k (#kernel_size)
grad_b: gradient of b, shape = c_out
'''
_, C_IN, H_IN, W_IN = input.shape
_, C_OUT, H_OUT, W_OUT = grad_output.shape
grad_output_col = im2col_cython(grad_output, kernel_size, kernel_size, kernel_size - 1, 1)
h_padded = grad_output.shape[2] + kernel_size - 1
w_padded = grad_output.shape[3] + kernel_size - 1
grad_output_col = grad_output_col.T.reshape(h_padded, w_padded, grad_output.shape[0], -1)
W_reshaped = np.rot90(W, 2, (2, 3)).transpose(1, 0, 2, 3).reshape(C_IN, -1)
grad_input = np.dot(grad_output_col, W_reshaped.T).transpose(2, 3, 0, 1)
grad_input = grad_input[:, :, pad: H_IN + pad, pad: W_IN + pad]
input_col = im2col_cython(input.transpose(1, 0, 2, 3), H_OUT, H_OUT, pad, 1)
h_padded = input.shape[2] + 2 * pad - H_OUT + 1
w_padded = input.shape[3] + 2 * pad - H_OUT + 1
input_col = input_col.T.reshape(h_padded, w_padded, input.shape[1], -1)
grad_W = np.dot(input_col, grad_output.transpose(1, 0, 2, 3).reshape(C_OUT, -1).T).transpose(3, 2, 0, 1)
grad_b = np.sum(grad_output, axis=(0, 2, 3))
return grad_input, grad_W, grad_b
def avgpool2d_forward(input, kernel_size, pad):
'''
Args:
input: shape = n (#sample) x c_in (#input channel) x h_in (#height) x w_in (#width)
kernel_size: size of the window to take average over
pad: number of zero added to both sides of input
Returns:
output: shape = n (#sample) x c_in (#input channel) x h_out x w_out,
where h_out, w_out is the height and width of output, after average pooling over input
'''
input_padded = np.lib.pad(input, ((0,), (0,), (pad,), (pad,)), 'constant')
output = block_reduce(input_padded, block_size=(1, 1, kernel_size, kernel_size), func=np.mean)
return output
def avgpool2d_backward(input, grad_output, kernel_size, pad):
'''
Args:
input: shape = n (#sample) x c_in (#input channel) x h_in (#height) x w_in (#width)
grad_output: shape = n (#sample) x c_in (#input channel) x h_out x w_out
kernel_size: size of the window to take average over
pad: number of zero added to both sides of input
Returns:
grad_input: gradient of input, shape = n (#sample) x c_in (#input channel) x h_in (#height) x w_in (#width)
'''
grad_input = grad_output.repeat(kernel_size, axis=2).repeat(kernel_size, axis=3) / (kernel_size * kernel_size)
return grad_input[:, :, pad: grad_output.shape[2] * kernel_size - pad, pad: grad_output.shape[3] * kernel_size - pad]
def im2col_cython(np.ndarray[DTYPE_t, ndim=4] x, int field_height,
int field_width, int padding, int stride):
cdef int N = x.shape[0]
cdef int C = x.shape[1]
cdef int H = x.shape[2]
cdef int W = x.shape[3]
cdef int HH = (H + 2 * padding - field_height) / stride + 1
cdef int WW = (W + 2 * padding - field_width) / stride + 1
cdef int p = padding
cdef np.ndarray[DTYPE_t, ndim=4] x_padded = np.pad(x,
((0, 0), (0, 0), (p, p), (p, p)), mode='constant')
cdef np.ndarray[DTYPE_t, ndim=2] cols = np.zeros(
(C * field_height * field_width, N * HH * WW))
# Moving the inner loop to a C function with no bounds checking works, but does
# not seem to help performance in any measurable way.
im2col_cython_inner(cols, x_padded, N, C, H, W, HH, WW,
field_height, field_width, padding, stride)
return cols
@cython.boundscheck(False)
cdef int im2col_cython_inner(np.ndarray[DTYPE_t, ndim=2] cols,
np.ndarray[DTYPE_t, ndim=4] x_padded,
int N, int C, int H, int W, int HH, int WW,
int field_height, int field_width, int padding, int stride) except? -1:
cdef int c, ii, jj, row, yy, xx, i, col
for c in range(C):
for ii in range(field_height):
for jj in range(field_width):
row = c * field_width * field_height + ii * field_height + jj
for yy in range(HH):
for xx in range(WW):
for i in range(N):
col = yy * WW * N + xx * N + i
cols[row, col] = x_padded[i, c, stride * yy + ii, stride * xx + jj]
实验参数
网络结构
| 层序号 | 网络层类型 | 输入节点数 | 输出节点数 | 核大小 |
|---|---|---|---|---|
| 1 | Conv2D | 1*28*28 | 8*28*28 | 3*3 |
| 2 | Relu | 8*28*28 | 8*28*28 | - |
| 3 | AvgPool2D | 8*28*28 | 8*14*14 | 2*2 |
| 4 | Conv2D | 8*14*14 | 16*14*14 | 3*3 |
| 5 | Relu | 16*14*28 | 16*14*14 | - |
| 6 | AvgPool2D | 16*14*14 | 16*7*7 | 2*2 |
| 7 | Reshape | 16*7*7 | 784 | - |
| 8 | Linear(FC) | 784 | 256 | - |
| 9 | Relu | 256 | 256 | - |
| 10 | Linear(FC) | 256 | 10 | - |
| 11 | Relu | 10 | 10 | - |
相关参数
| learning rate | weight_decay | momentum | epoch | batch_size |
|---|---|---|---|---|
| 0.01 | 0.0001 | 0.9 | 100 | 100 |
实验结果
| epoch | 训练集loss | 测试集loss | 训练集accuracy | 测试集accuracy |
|---|---|---|---|---|
| 0 | 0.1224 | 0.1495 | 96.23 | 95.14 |
| 10 | 0.0341 | 0.0400 | 98.89 | 98.54 |
| 20 | 0.0149 | 0.0355 | 99.49 | 98.92 |
| 30 | 0.0117 | 0.0342 | 99.69 | 98.93 |
| 40 | 0.0075 | 0.0351 | 99.77 | 98.85 |
| 50 | 0.0049 | 0.0365 | 99.89 | 98.88 |
| 60 | 0.0037 | 0.0343 | 99.94 | 98.99 |
| 70 | 0.0029 | 0.0322 | 99.97 | 98.97 |
| 80 | 0.0024 | 0.0322 | 99.98 | 99.03 |
| 90 | 0.0023 | 0.0313 | 99.98 | 99.02 |
| 100 | 0.0022 | 0.0307 | 99.99 | 99.10 |
第一层卷积层的结果可视化:
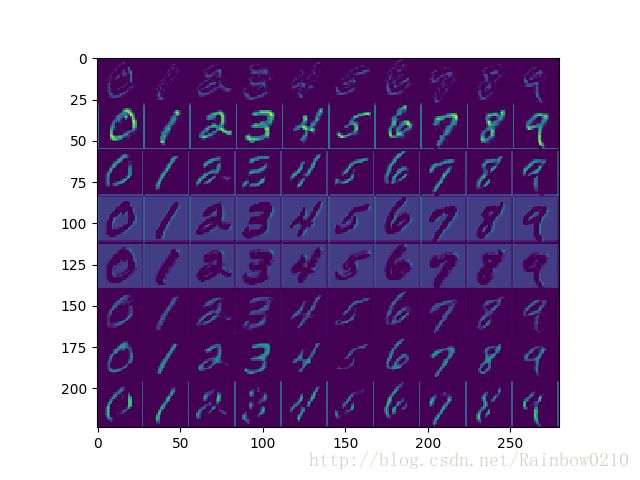
从实验结果可以看出,相比于MLP的 98.67% 的test-accuracy,CNN的test-accuracy更高,可以达到 99.10% ,但是test-loss却不比MLP低,可能的原因是由于CNN的局部互连性,导致一些全局信息的丢失,但是这些信息对于分类结果却影响不大。在CPU上,CNN的训练速度远远慢于MLP,一个epoch大概需要 6 分钟,但是在相同的超参数设置下,有着更快的收敛速度, 20 个epoch就基本收敛。